







1.启动Autoware
cd ~/autoware.ai/
source install/setup.bash
roslaunch runtime_manager runtime_manager.launch
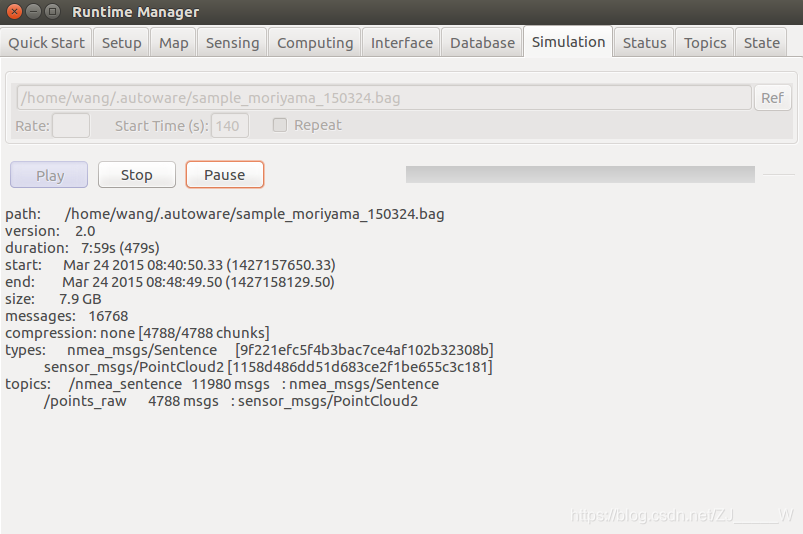
2.切换到Simulation模块
- 点击右侧的Ref,选择文件:
/.autoware/sample_moriyama_150324.bag - 点击Play按钮以后,立马点击Pause按钮
3.加载地图数据
- 步骤和这个博客完全一样,加载地图数据
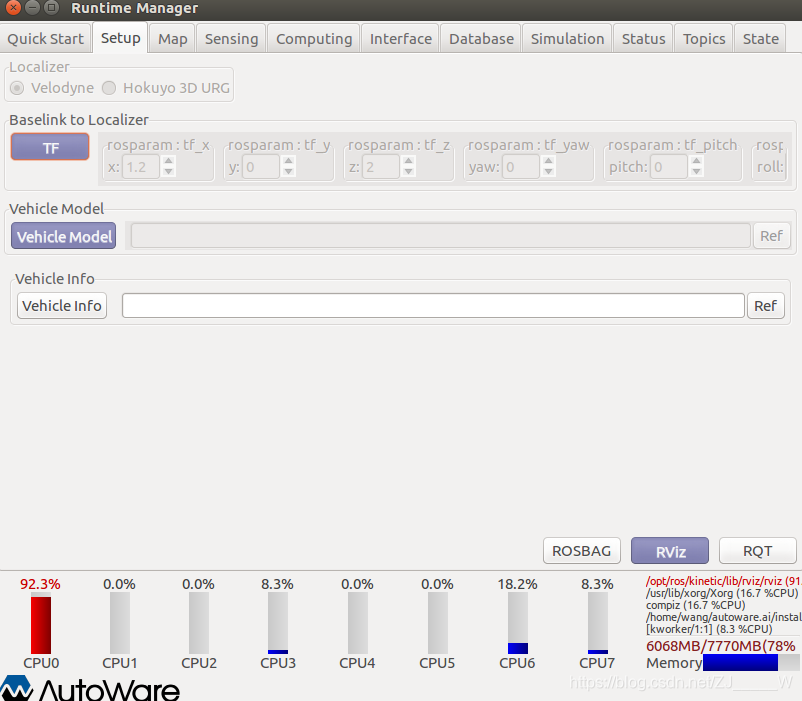
4.切换到Setup模块
- 依次点击TF和Vehicle Model
- 启动右下方RViz可视化工具
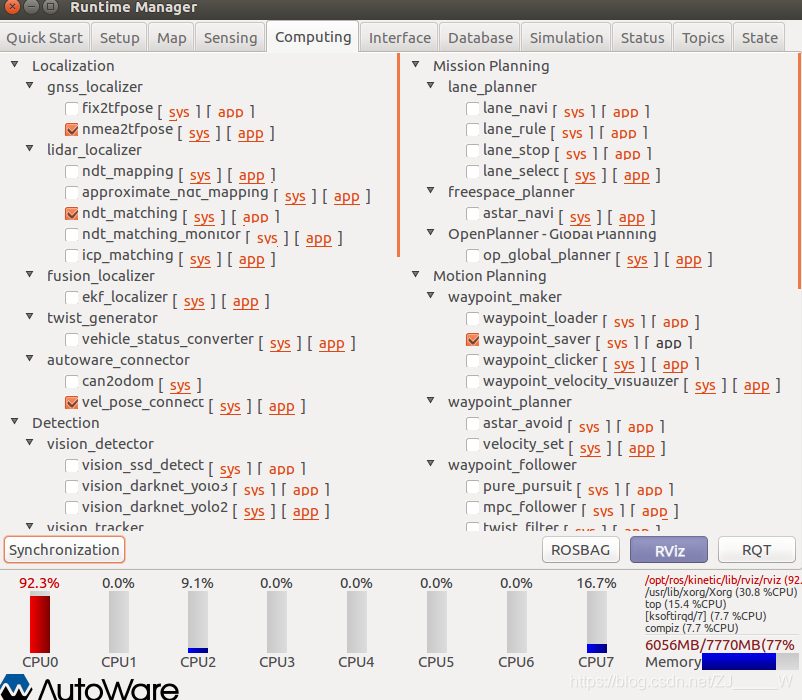
5.切换到Computing模块
- 勾选下图所示:
点击waypoint_saver后面的App点击Ref选择保存路径
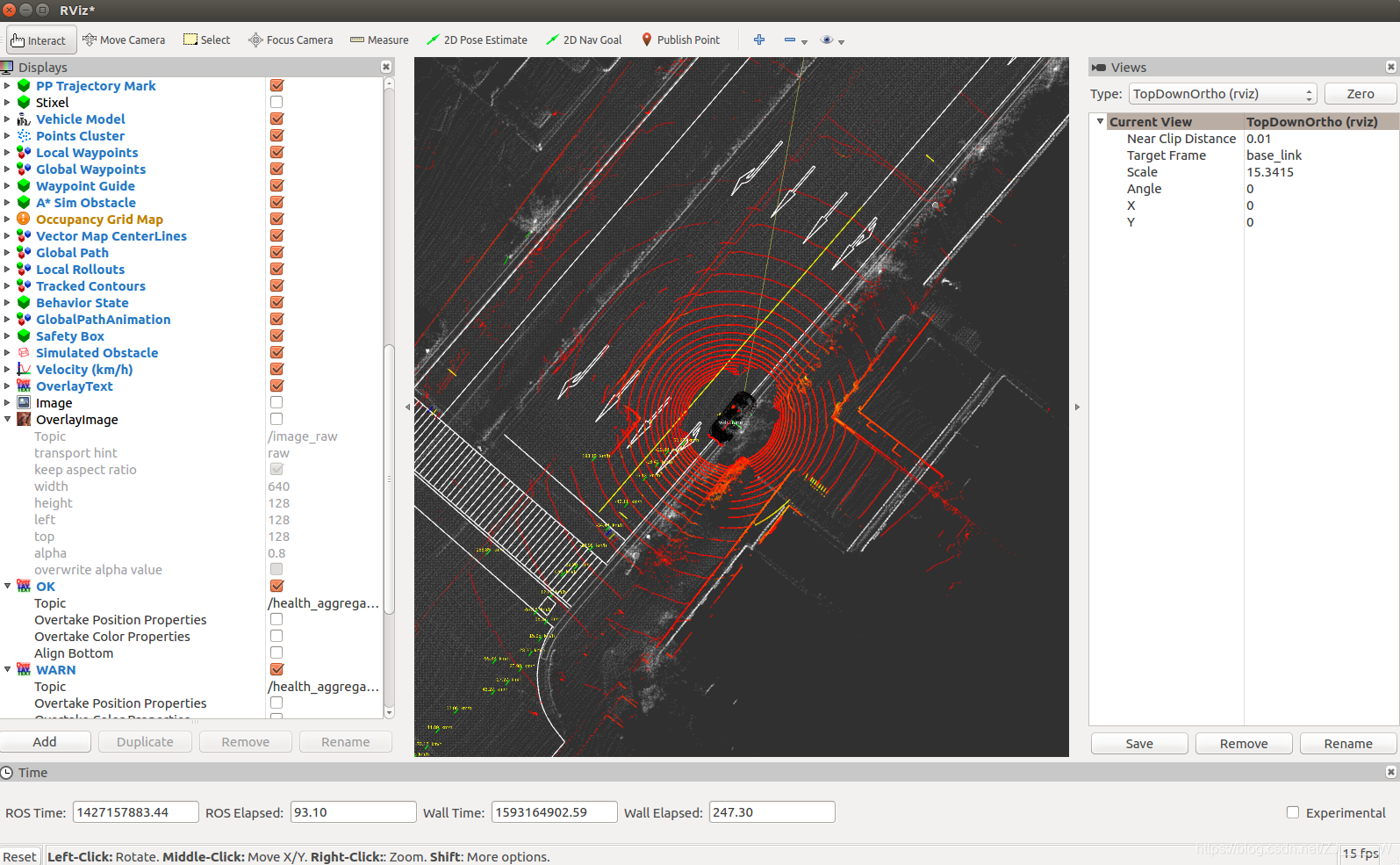
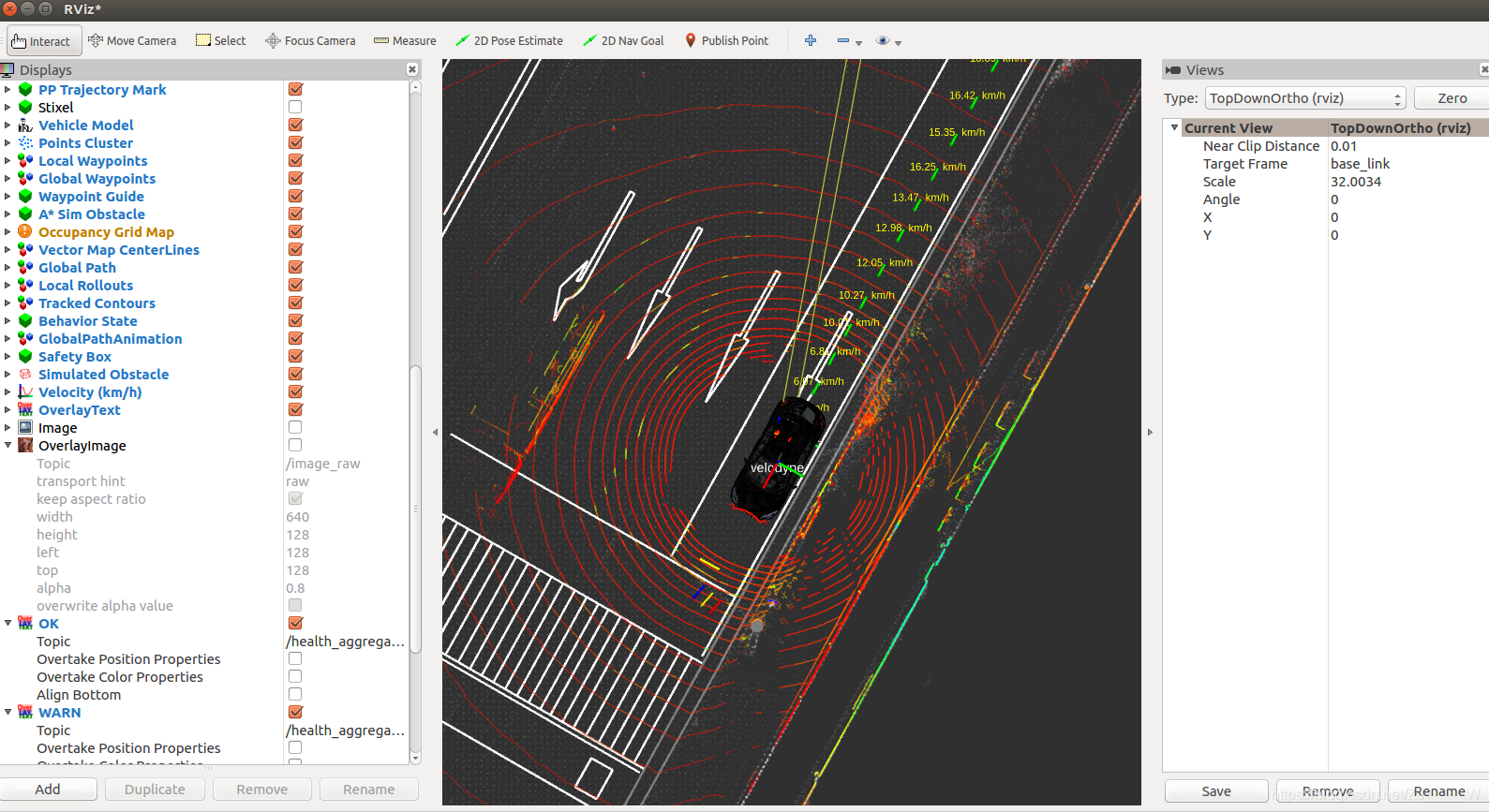
6.返回Simuation模块
- 点击Pause继续播放,效果如下:
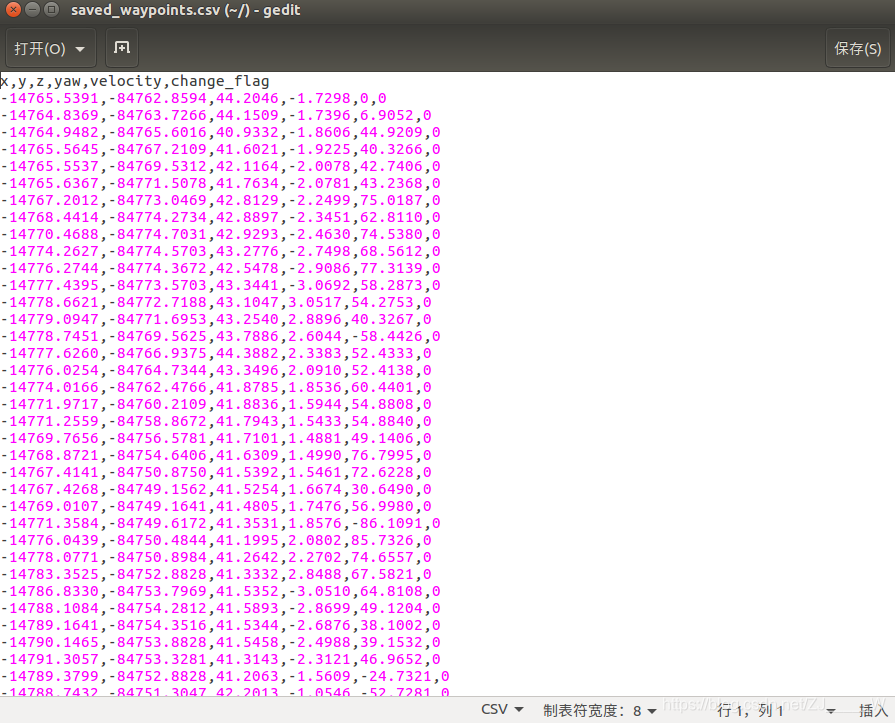
7.查看生成文件
找到自己的保存路径,生成一个waypoint文件















 148
148











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









