







之前已经有5篇专题博文介绍:
慕课:https://www.icourse163.org/course/CSLG-1462124166
现代控制理论很多学生反馈像矩阵很难学,其实这很正常,现代控制理论中所有运算本意是让计算机代替人去做控制,所以用人脑求解各种矩阵自然痛苦。原理掌握,使用matlab或者C++等功能库,可以设计出控制性能好的系统才是最重要的。
在计算机出现之前没有现代控制理论,它是伴随电子信息进步而发展的,现在现代控制理论随着人工智能的崛起又逐渐走向衰落。
主要分为五个部分。
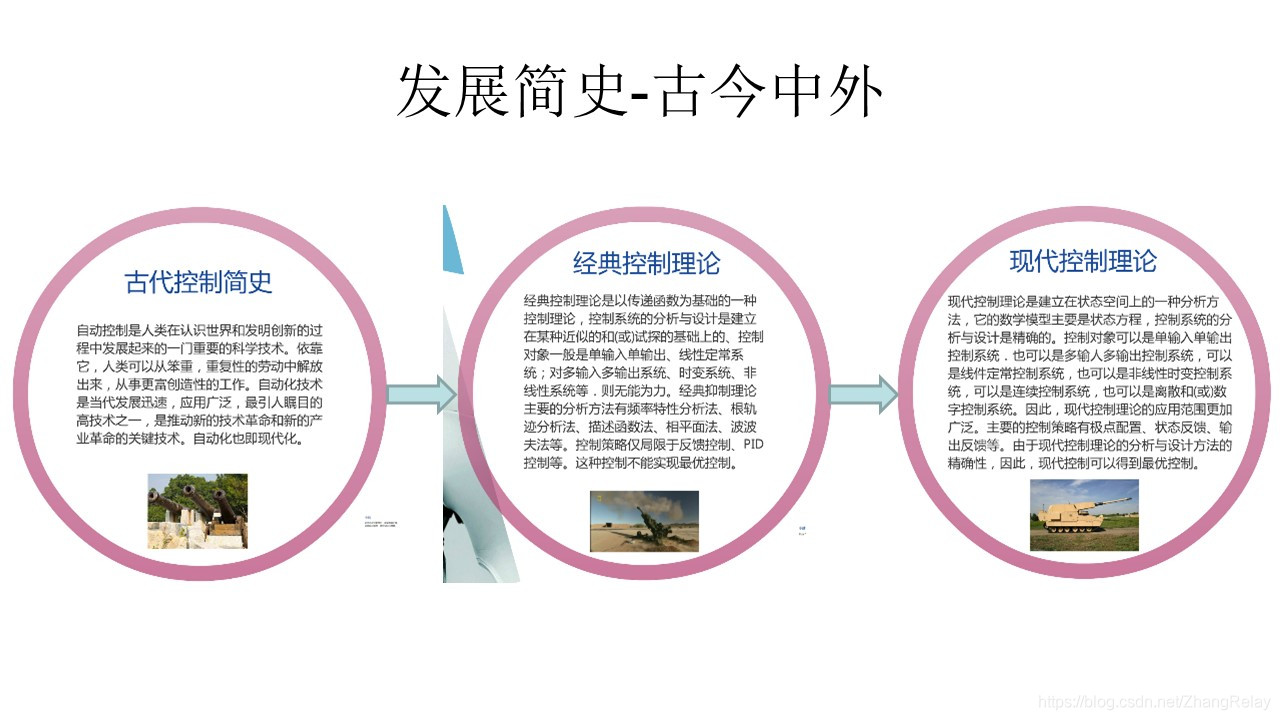
军事对于科技推动意义重大,控制理论在其中同步发展,火炮那个时代的控制通常是大小远近等模糊量。
经典控制理论出现后,对于系统控制精度有个较大提升,但依然是单一系统。
现代控制理论用于多输入多输出系统,更复杂,并可实现最优控制。
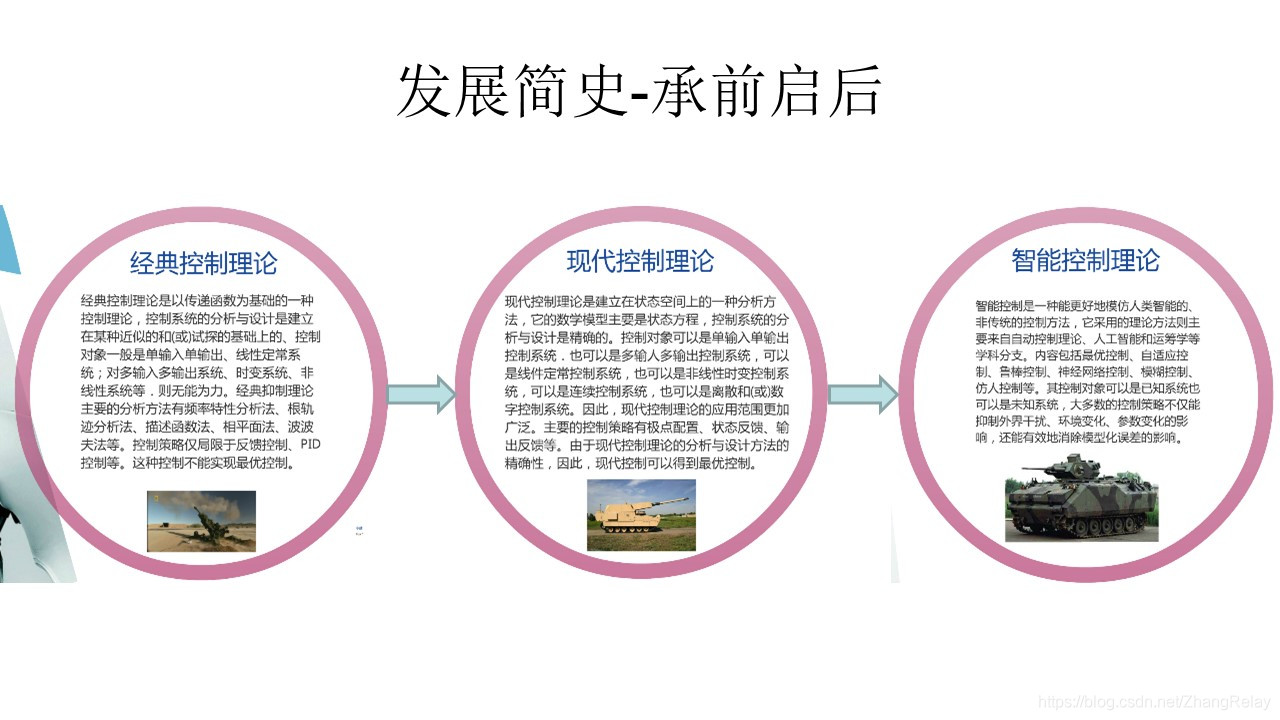
智能控制正在逐步得到广泛应用。
虽然现代控制理论完善和成熟,自然它也就成为了自动化和机器人专业的必修课程,非常重要,推荐学习教材如图所示。
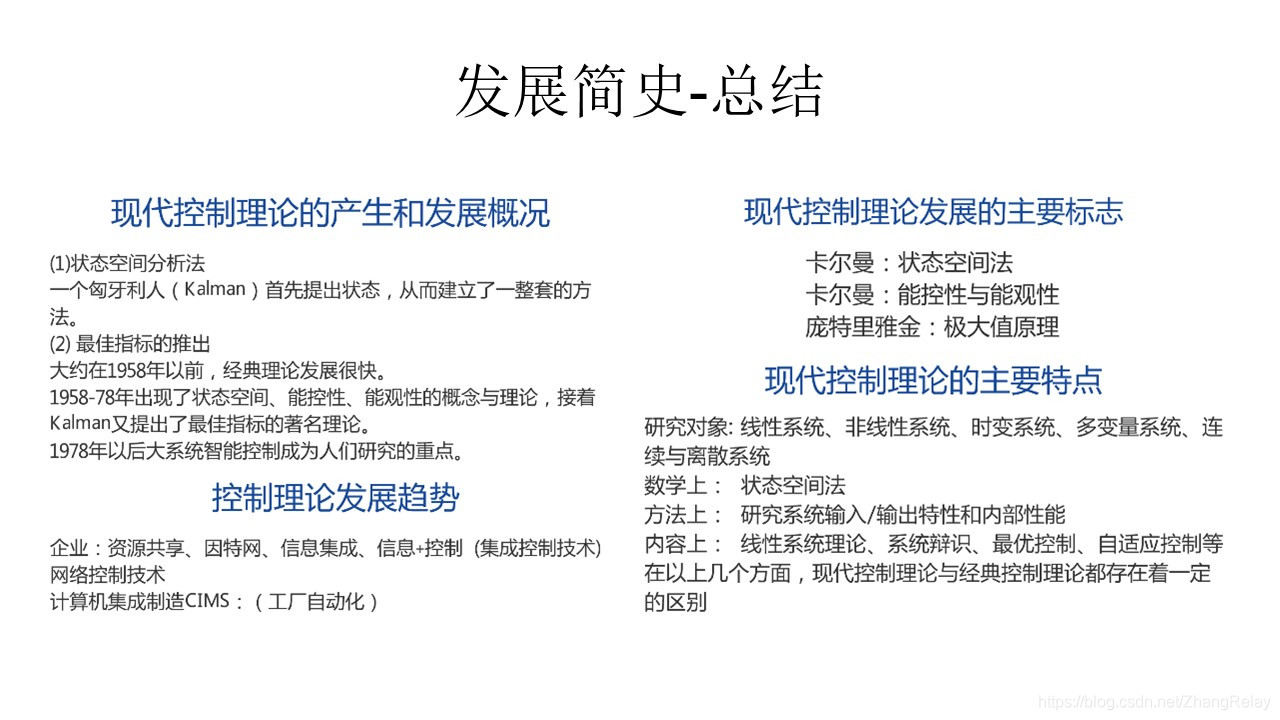
总结可参考左下介绍。
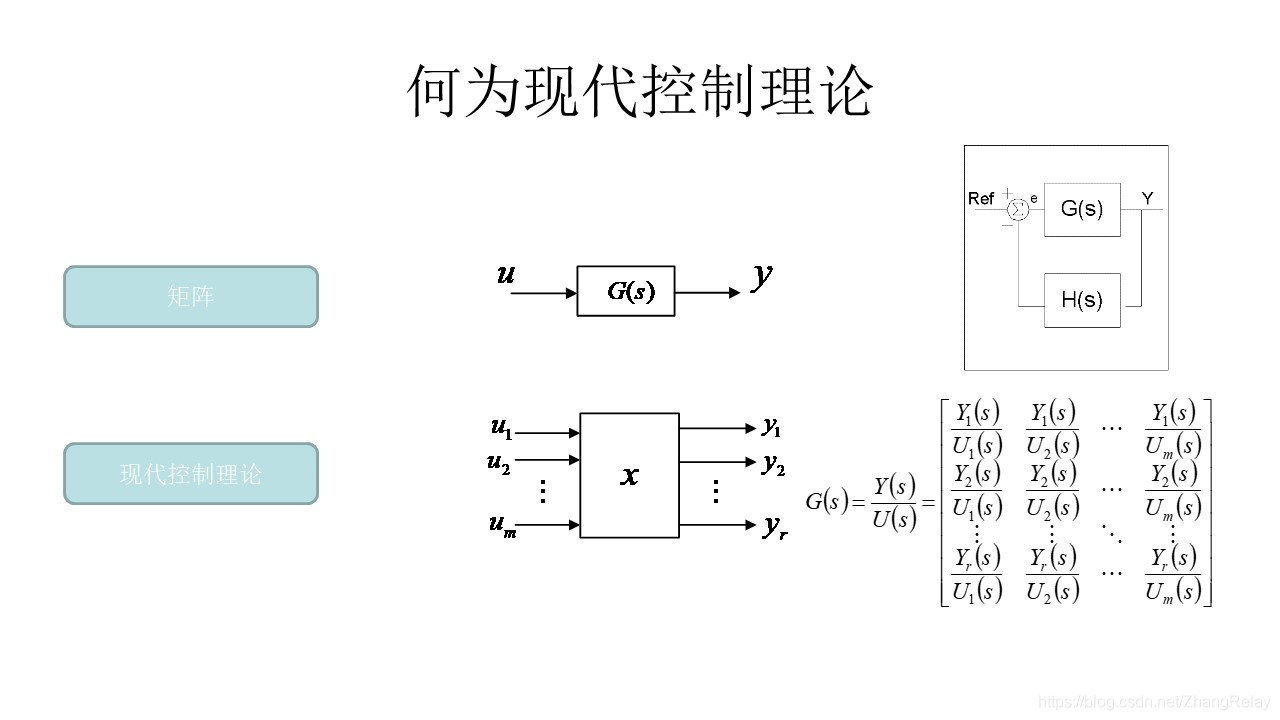
单到多,矩阵应用!
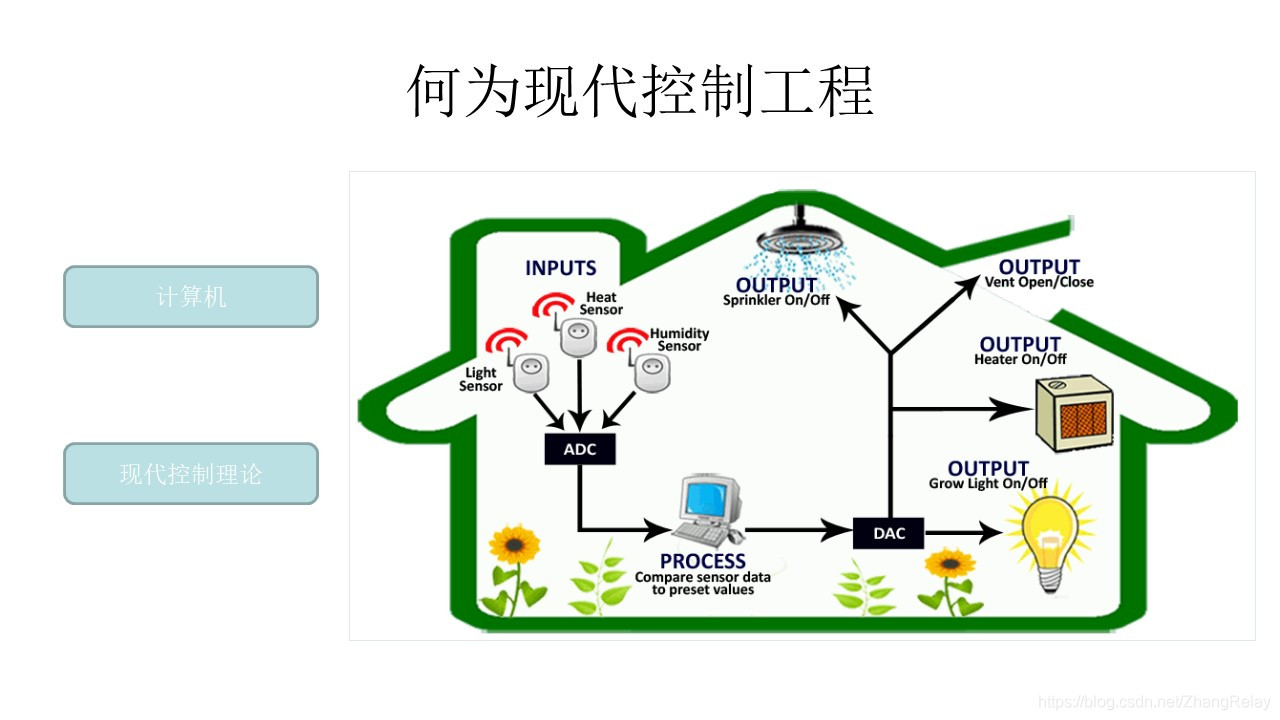
没有计算机的发展就不可能有现代控制理论的发展,右图智能家居工程,多目标多任务,可以用现代控制理论实现。
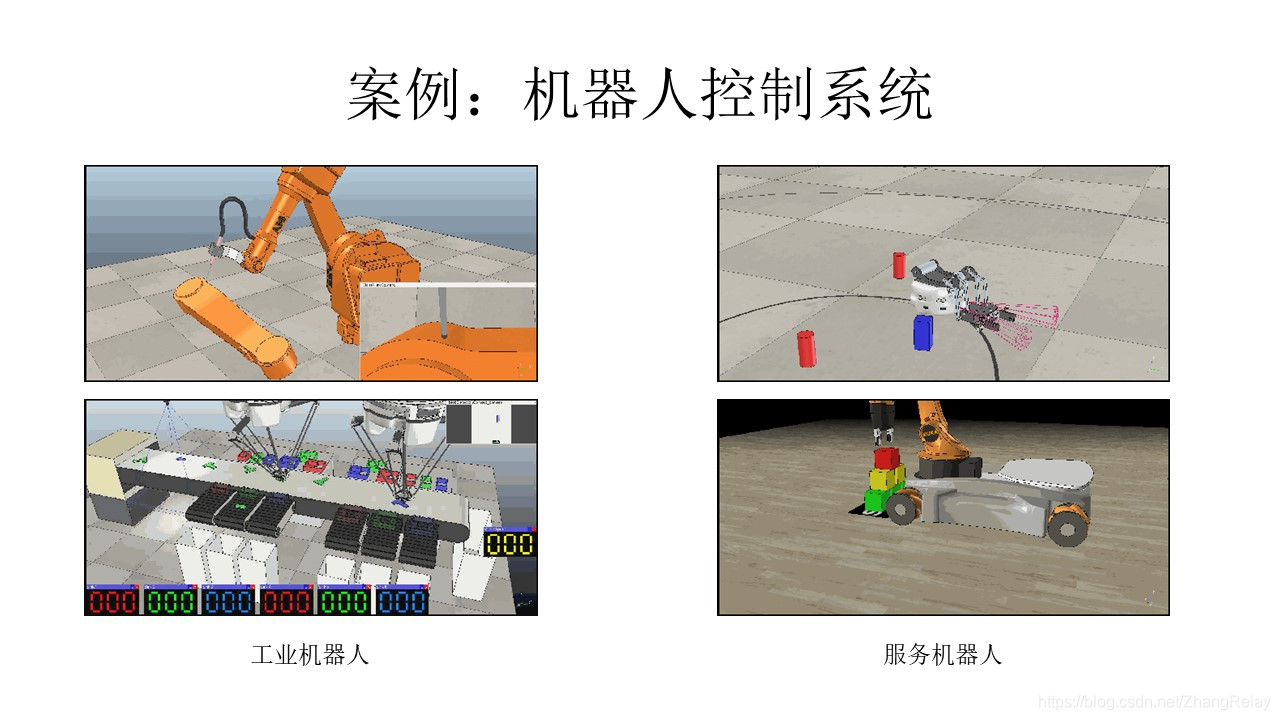
工业机器人焊接和地面小车巡线类似,材料分拣和物流运输类似。这些都需要现代控制理论的知识储备。
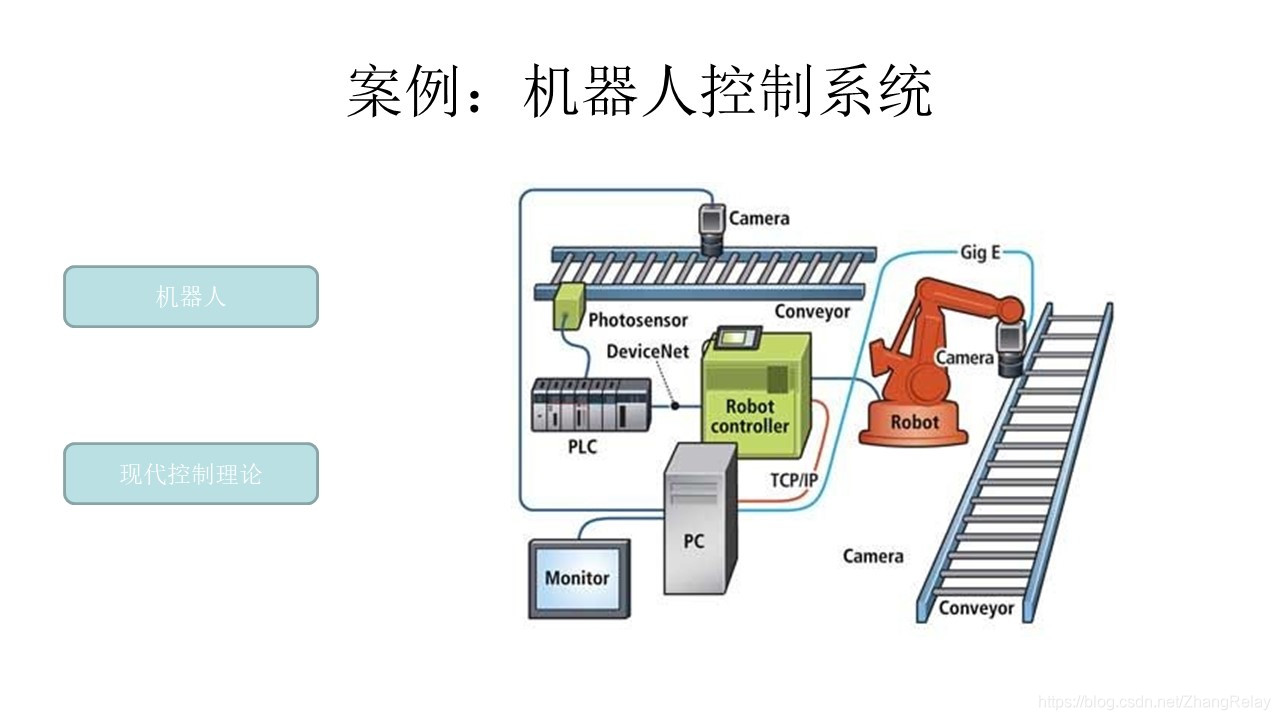
将计算机换成机器人直接从事生产就是机器人控制系统。
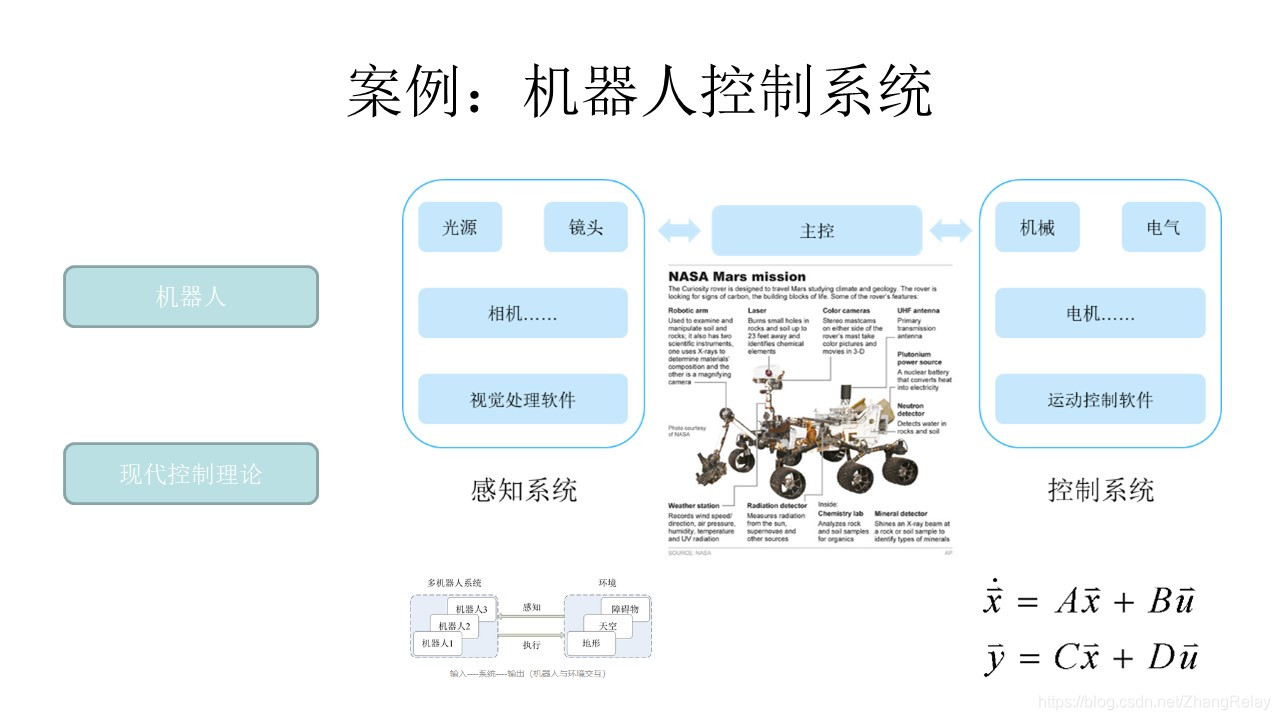
需要理解各实际系统,然后物理模型,其抽象数学模型,分析设计。
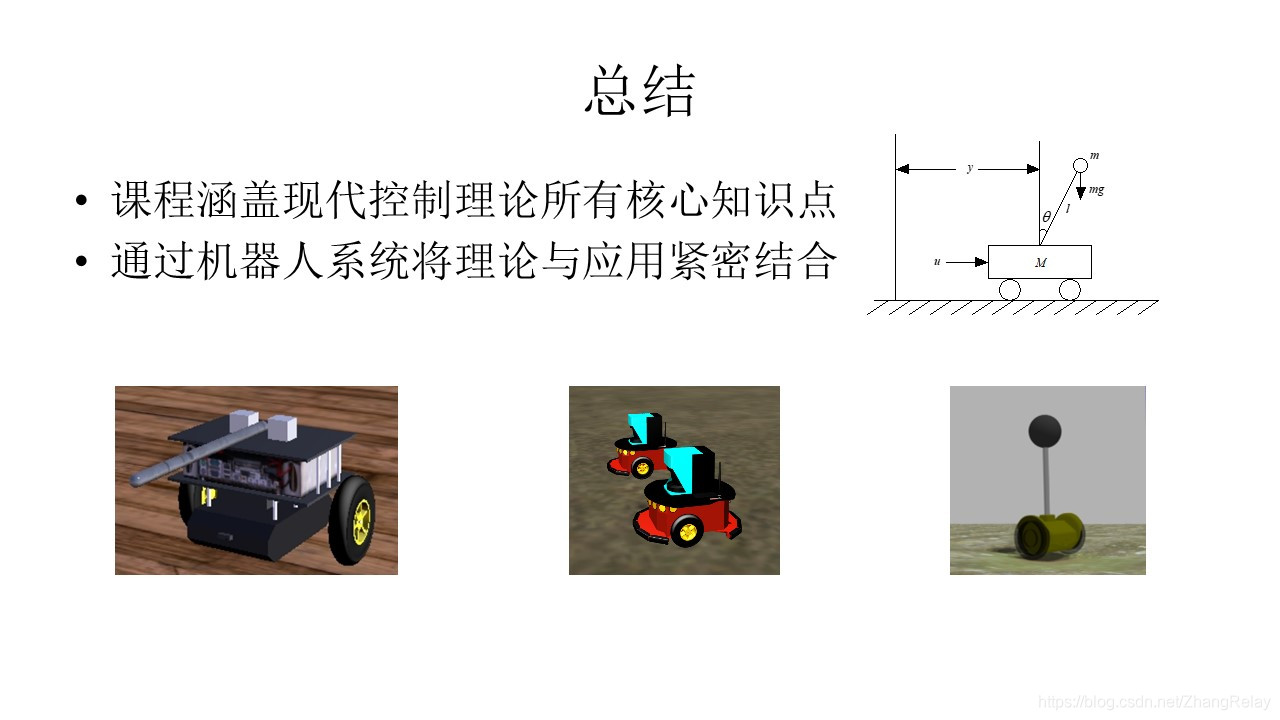
课程中涉及机器人仿真案例如上所示。
课程特点:不仅涵盖所有现代控制理论知识点,还将通过机器人系统将其应用到两轮差动移动机器人,倒立摆小车和自平衡机器人中。


















 2671
2671

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











