







文章目录
静基座惯导误差特性分析
由于复杂的误差微分方程我们解不了,所以我们来看简单的,静基座指的是,惯导安装的基座相对于地面是静止不动的,看他的误差是怎么发散的,也就是惯导的静态输出当成动态的来解
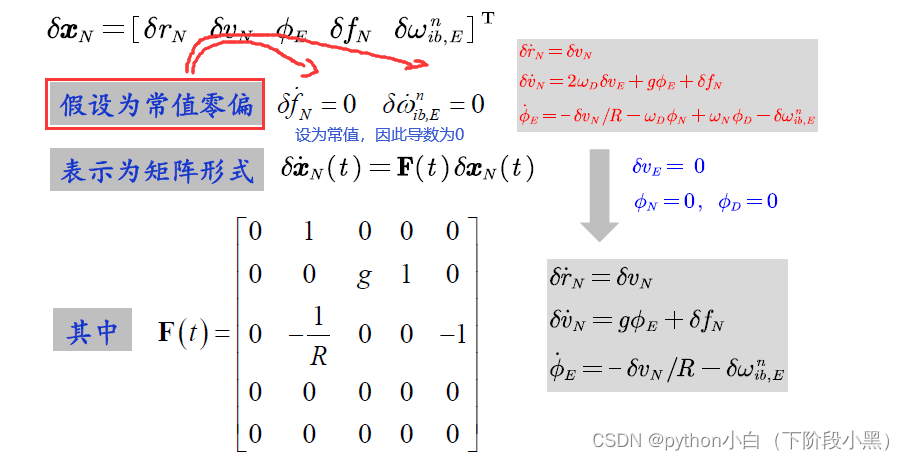
速度误差微分方程简化

位置误差微分方程简化

姿态误差微分方程简化

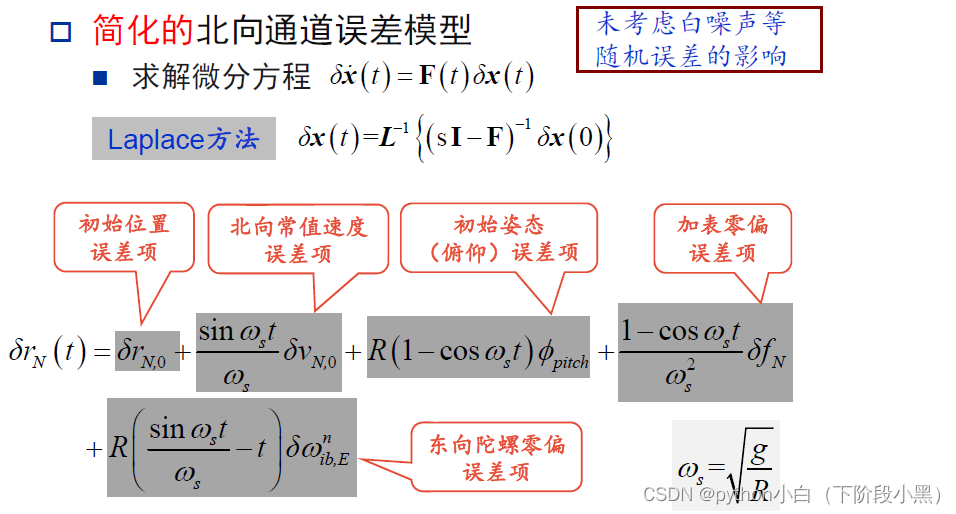
简化的北向通道误差模型
下面就能得到北向位置误差的时域表达式:
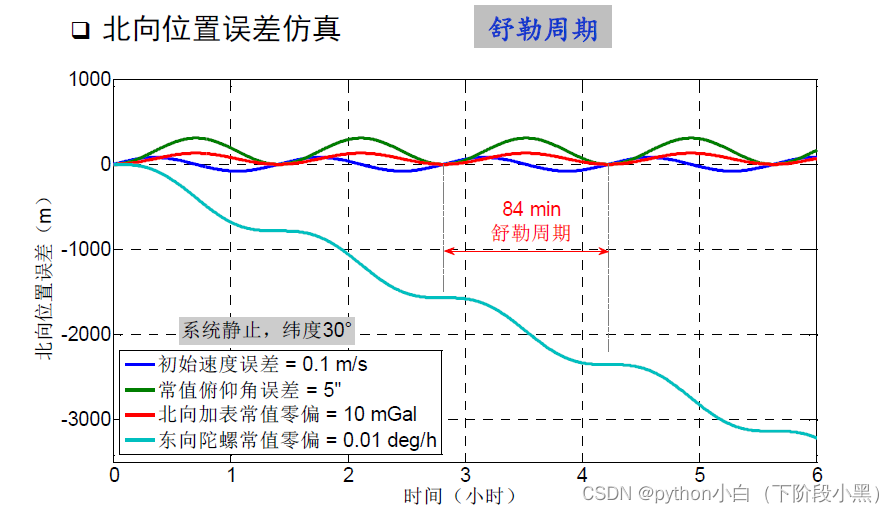
北向位置误差仿真
下图表现出来的舒勒周期只能在导航级或导航级以上的惯导中看到,因为对于中低精度惯导,没等到84min,位置就不知道发散到哪里去了,什么线性假设、小角度假设、忽略二阶小的假设都失效了
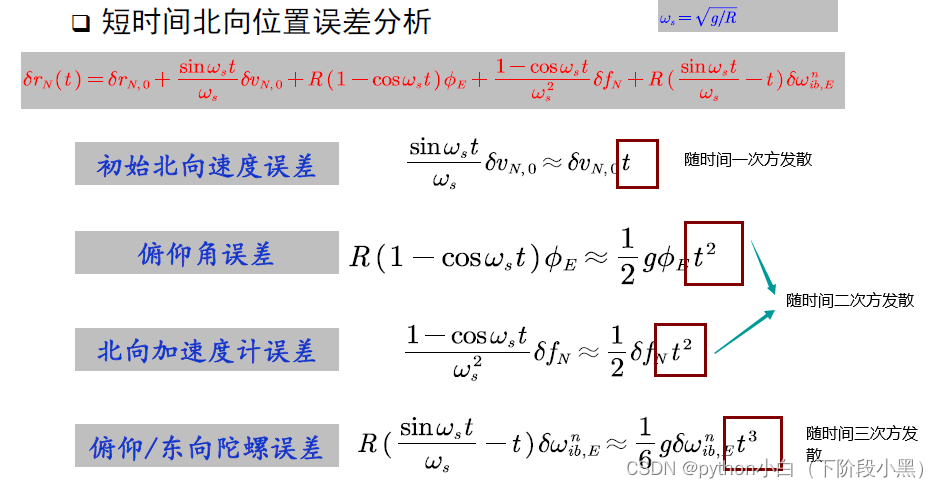
短时间北向位置误差分析
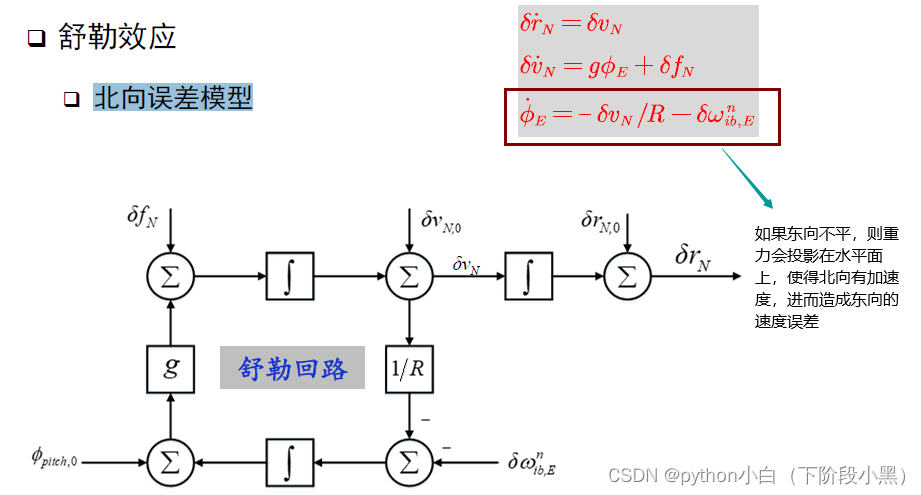
舒勒效应
北向误差模型

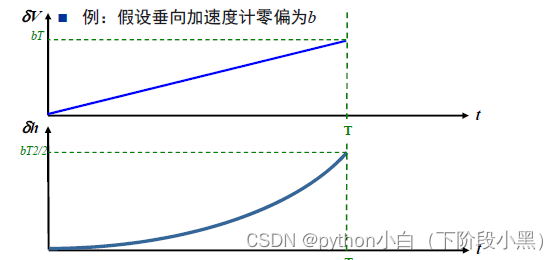
高程通道
对于高程来说,就没那么幸运了,他没有舒勒调节,就会使得速度随时间一次方发散,位置随时间二次方发散
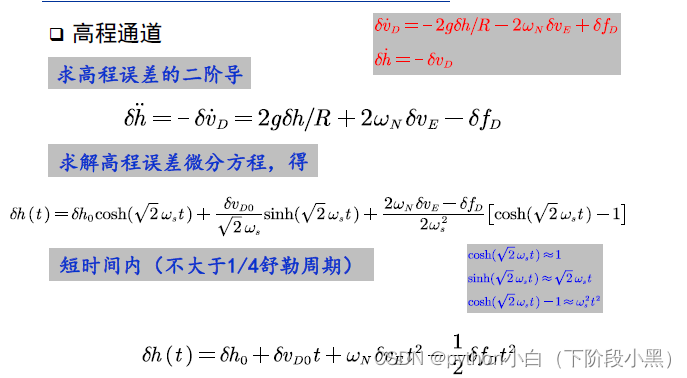
纯惯导高程通道,速度和位置误差均具有系统性,且不受约束
惯导误差分析总结
如何减小惯导误差
1.为减小惯导系统性误差,需定期引入外部测量
2.系统性误差主要为加速度计零偏和陀螺零偏引起的误差项
3.可用作惯导更新的测量值包括
- 位置测量值(如位置更新,CUPT)
- 速度测量值或零速(ZUPT)
- 姿态测量值
4.用于估计INS系统性误差的方法
- 卡尔曼滤波(Kalman Filtering)
- 曲线拟合(Curve fitting)
- 其他滤波方法(如神经网络等)
总结
误差建模主要靠的就是误差扰动


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











