







视觉传感器和相机功能上差不多,但还是有一些不同,官方的解释是这样的

概括一下,视觉传感器有API函数,相机没有,需要自己写;视觉传感器更占CPU;视觉传感器观测的对象必须把renderable属性勾上。
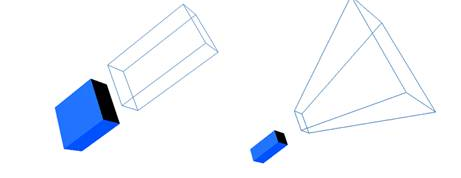
视觉传感器根据视角分为两类,正交(orthogonal)和透视(perspective),这个图可以很好理解二者的差异
视觉传感器的一些基本属性配置

主属性中其他顾名思义即可,最后一个Packet1 is blank什么意思呢?
视觉传感器得到图像的RGB和深度是通过Packet1来返回,滤波器得到的图像通过Packet2,Packet3……来得到。
Packet1包括15个数据位,依次为灰度,RGB,深度信息,可以通过simReadVisionSensor来获取</
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 634
634











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









