







编译:注意编译使用的python环境,如果使用了conda环境后续也要启用。
1. 安装
Installation — OCS2 1.0.0 documentation
如果有下次再来补(
2. 测试
Robotic Examples — OCS2 1.0.0 documentation
编译完成后,测试legged robot。
运行
roslaunch ocs2_legged_robot_ros legged_robot_ddp.launch等待窗口出现mpc is reset
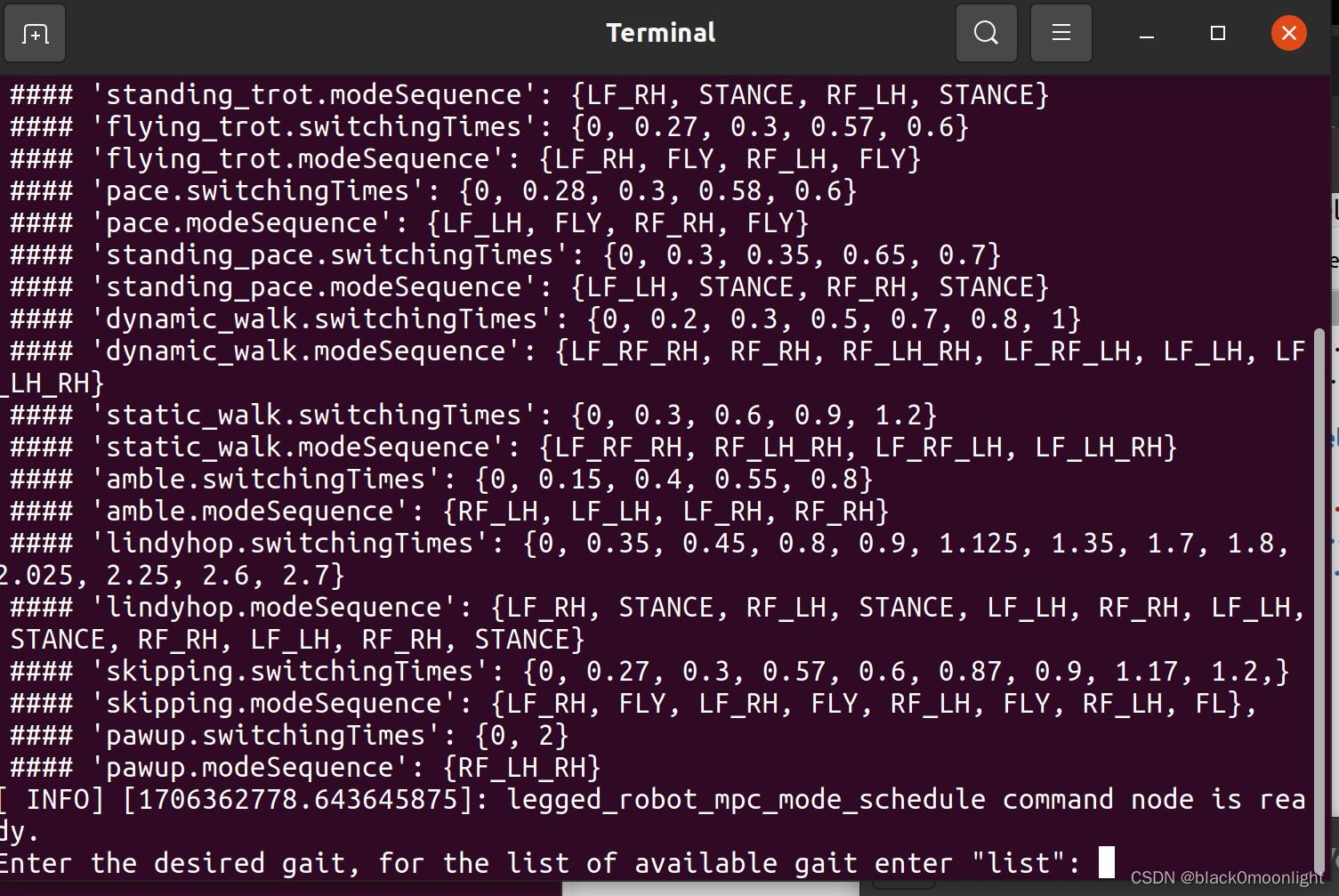
在另一个窗口输入dynamic_walk,或者使用list查找想要的模式。
在这里输入运动命令
正常运动。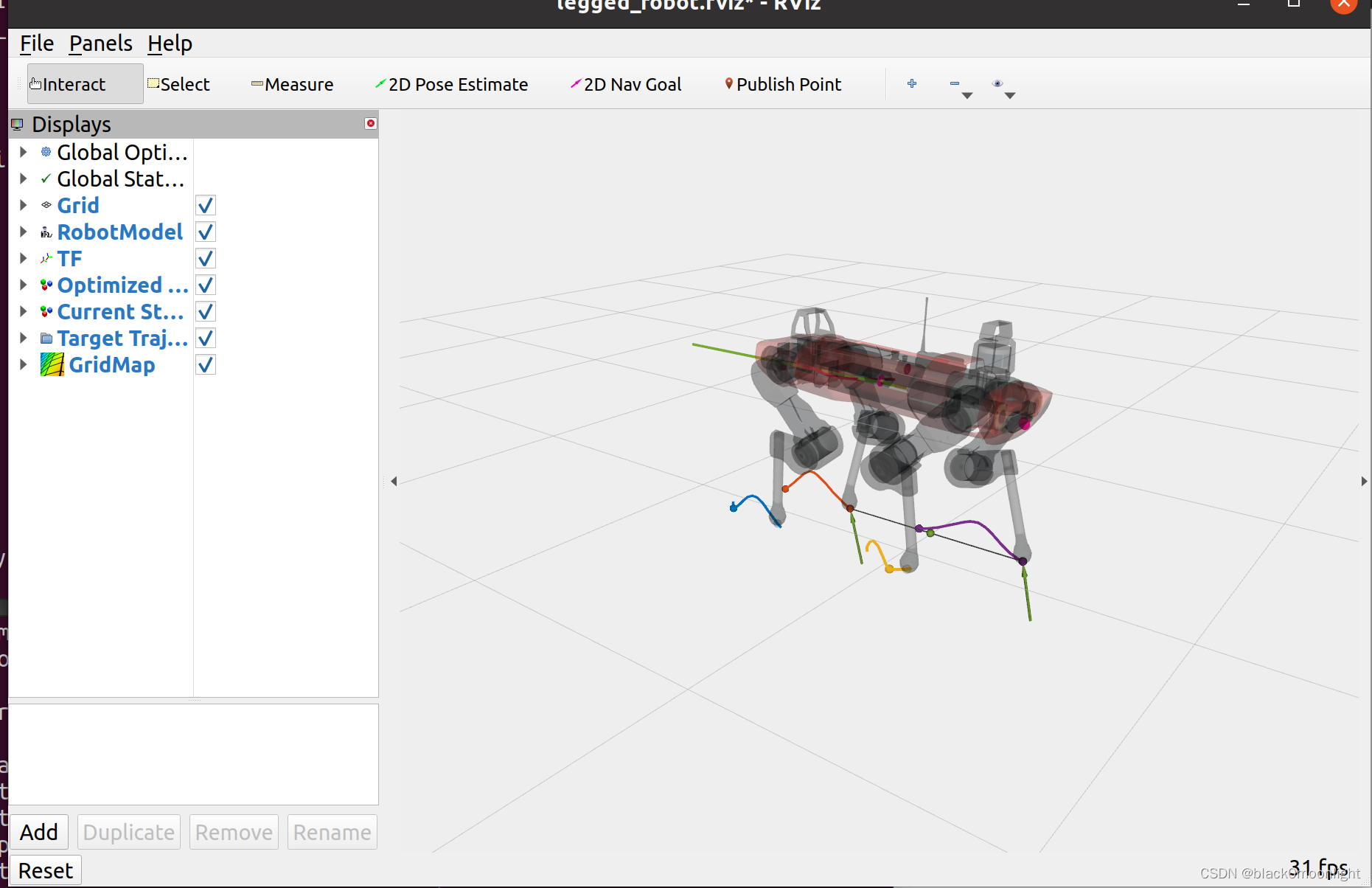

















 2800
2800

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









