






一、主要内容
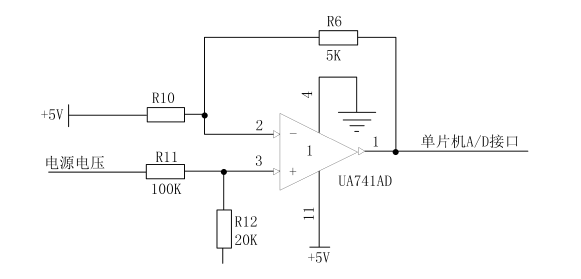
控制策略中的电控系统是混合动力汽车能够正常发挥运作的关键保障,促使其能够得以驱动的来源自两个部分,各自为电动机及发动机,在正常行驶时,电动机会给混合动力汽车的储能单元进行充电,对制动时的能量进行回收,电控系统通过对发动机、电机和储能单元的控制,维持在混合动力汽车处于各种工况环境下对能量的要求,分析混合动力汽车相关内容得出其包含的性能会在很大程度上受到电控系统的直接影响与作用,包括动力性和燃油经济性等,在汽车运行中,利用电机与电动机进行配合为混合动力汽车提供动力和进行制动能量的回收。
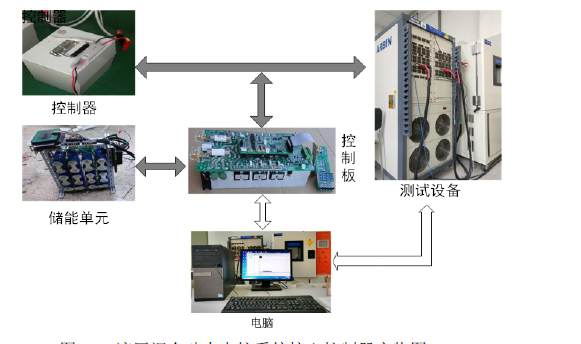
对电控系统的需要实现的软件功能进行了分析,并对软件实现的流程进性了设计分析,构建出控制系统的主程序以及子程序,同时,在子程序的设计中含有对信号计算模块的构建,还含有通信程序的编程和设计、每种模式下的流程设;软件调试是在微控制器开发工具的集成开发环境中展开的;在混合动力系统整个测试环节上给出了说明。基于对选用的测试台的使用,实验测试了电控系统具备主要特性。
二、部分代码与仿真
func NewSchedulerCommand() *cobra.Command {
opts, err := options.NewOptions()
if err != nil {
klog.Fatalf("unable to initialize command options: %v", err)
}
// cobra是一个创建命令行工具的框架。
cmd := &cobra.Command{
Use: "kube-scheduler",
Long: `The Kubernetes scheduler is a policy-rich, topology-aware,
workload-specific function that significantly impacts availability, performance,
and capacity. The scheduler needs to take into account individual and collective
resource requirements, quality of service requirements, hardware/software/policy
constraints, affinity and anti-affinity specifications, data locality, inter-workload
interference, deadlines, and so on. Workload-specific requirements will be exposed
through the API as necessary.`,
Run: func(cmd *cobra.Command, args []string) {
// 一切的起点
if err := runCommand(cmd, args, opts); err != nil {
fmt.Fprintf(os.Stderr, "%v\n", err)
os.Exit(1)
}
},
}
return cmd
}
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











