






一、核心思路
主要针对四轮转向汽车控制策略的研究,通过对不同的控制方法搭建控制模型进行比较研究,利用 CarSim 软件验证了所设计的控制模型的合理性和有效性,确定了一种可以在不同摩擦系数工况下能够充分发挥4WS技术优势的控制策略。最终实现利用 4WS 技术进一步改善车辆的操纵性,并保证车辆在不同的工况下稳定行驶的研究目的。
分析指出前轮转向汽车的不足,介绍了四轮转向系统的分类与原理,罗列了国内外对四轮转向汽车的研究现状以及面临的关键技术难点,预测了四轮转向技术的发展方向和应用前景。 根据汽车理论知识,将汽车简化为只有横向和横摆这两个自由度的模型。分析了前轮转角、车速与横摆角速度在理论上的函数关系,描绘了三者之间的关系曲线图,通过选取不同的稳定性因素 K 值来研究车速对横摆角速度的影响。
给四个车轮施加不同的制动力矩,引入直接横摆力矩控制。介绍了 PID 控制与模糊控制,并基于 CarSim 建立了 4WS 比例 PID 直接横摆力矩控制、 4WS 比例模糊直接横摆力矩控制。在低速角阶跃和高速单移线仿真工况下,输出代表汽车稳定性的仿真曲线,三种控制策略输出的仿真结果做对比研究。
二、仿真过程
X、Y、Z 以及绕三个方向转动的六个自由度。要想分析车辆的运动状态和汽车在行驶过程中受的各种力,首先需要建立一个准确而可靠的汽车直角坐标系。X 轴通过坐标原点指向车辆前进方向,Y 轴通过坐标原点指向汽车左侧,Z 轴通过坐标原点垂直向上,坐标原点 O 与车辆质心重合。

建模

横摆角速度稳态增益曲线
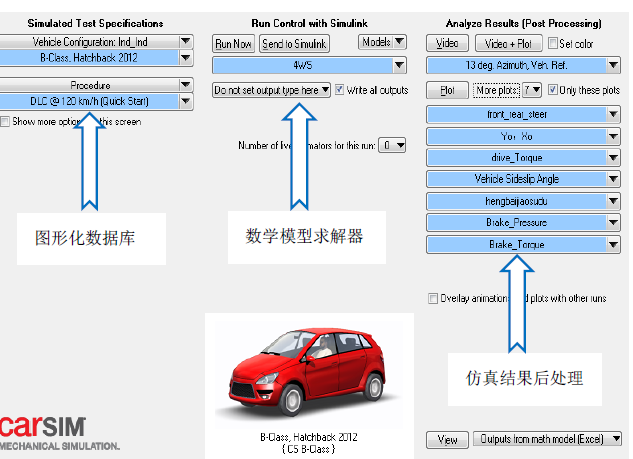
carsim软件

仿真过程
不同前轮转角条件下(从下到上前轮转角依次增大),横摆角速度与车速的关系曲线。虚线表示不同的摩擦系数下(从左到右摩擦系数依次增大),横摆角速度速度与车速的关系曲线。从图中可以看出,在某一前轮转角条件下,汽车行驶速度较低时,横摆角速度与车速为一次函数关系,有利于汽车完成转向。随着车速的增大,特别是在25m/s 时横摆角速度达到一个阈值,之后随着车速的增大开始逐渐变小,最后收敛于某一个值。这说明汽车在中高速行驶时,汽车的机动性有所降低。汽车在某一路面上行驶时,横摆角速度与车速呈反比例函数关系,车速较低时,横摆角速度较大,有利于汽车转向;高速时,横摆角速度较小,有利于司机操控汽车。
















 816
816











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











