







LeGO-LOAM是一种激光雷达SLAM算法,算法在软件架构上分为5个流程,分别是:
-
分割聚类:这部分主要操作是分离出地面点云;同时,对剩下的点云进行聚类,剔除噪声(数量较少的点云簇,被标记为噪声);
-
特征提取:对分割后的点云(排除地面点云部分)进行边缘点和面点特征提取;
-
Lidar里程计:在连续帧之间(边缘点和面点)进行特征匹配找到连续帧之间的位姿变换矩阵;
-
Lidar Mapping:对特征进一步处理,然后在全局的 Point Cloud Map 中进行配准;
-
Transform Integration:Transform Integration 融合了来自 Lidar Odometry 和 Lidar Mapping 的 pose estimation 进行输出最终的 pose estimate。
本次实验主要是探究LeGO-LOAM中的分割聚类算法在一款Robosense激光雷达上的分割效果,雷达参数信息大致如下,其中垂直视场角经实际测算应该是-25度到+0.2度,应该是属于路侧版本,而官网中给的是车载版本的参数。

1. 地面分割的思路
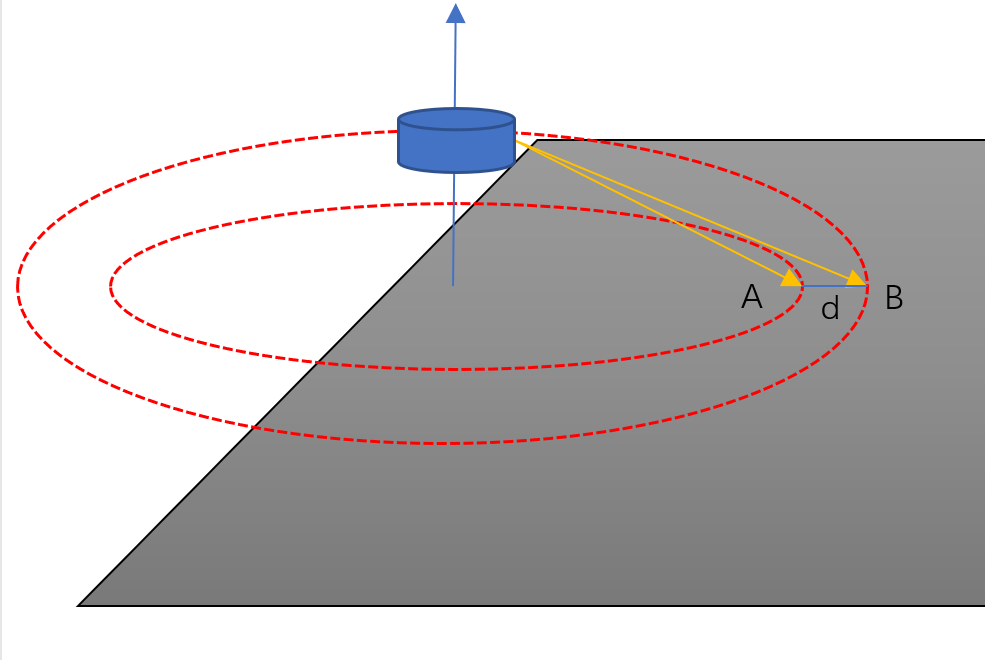
Lego-LOAM给出的地面分割的思路比较简单,如上图所示,相连两条扫描线打在地面同一列的两点A和B。计算A,B两点的高度差Hz=|Az-Bz|以及平面欧式距离Dxy。计算Hz和Dxy构建的三角形的角度值=atan2(Hz,Dxy),如果
<10,则认为两点A,B属于地面点。
2.地面分割相关代码
2.1 文件结构
(base) ➜ LeGO-LOAM git:(master) ✗ tree -L 2
.
├── CMakeLists.txt
├── include
│ └── utility.h #关键配置参数
├── launch
│ ├── block.png
│ ├── dataset-demo.gif
│ ├── demo.gif
│ ├── google-earth.png
│ ├── jackal-label.jpg
│ ├── odometry.jpg
│ ├── run.launch
│ ├── seg-total.jpg
│ └── test.rviz
├── package.xml
└── src
├── featureAssociation.cpp
├── imageProjection.cpp #地面分割相关代码
├── mapOptmization.cpp
└── transformFusion.cpp
2.2 关键参数配置
Lego-LOAM项目对VLP-16激光雷达做了适配,同时也在参数配置文件LeGO-LOAM/LeGO-LOAM/include/utility.h中还加入了HDL-32E、VLS-128、Ouster OS1-16、Ouster OS1-64等激光雷达的关键参数。不好意思的是并没有我手上的这款Robosens RS-Ruby Lite,我将訪款雷达的参数加入到配置文件中。
// RS-Ruby Lite
extern const bool useCloudRing = false; // if true, ang_res_y and ang_bottom are not used
extern const int N_SCAN = 80; //激光雷达的扫描线数
extern const int Horizon_SCAN = 1800; //一条线束1800个点,360度环绕
extern const float ang_res_x = 360./float(Horizon_SCAN); //单条线束的水平分辨率
extern const float ang_res_y = (25.+0.2)/float(N_SCAN); //单条线束的垂直分辨率,我经过实际验证手上这款RS-Ruby Lite雷达的垂直视场角是-25度至+0.2度.
extern const float ang_bottom = 25.; //从下往上第1根线的角度绝对值
extern const int groundScanInd = 76; // 地面线数,因为激光雷达是水平放置,并非所有线都会扫向地面LeGO-LOAM在检测地面点时并非遍历所有扫描线,因为雷达是水平旋转,会有部分扫描线是打向天空。框架代码中只取groundScanInd参数设置的扫描线。这个跟你实际安装的位置有很大的关系。
2.3 分割核心代码
地面提取功能在LeGO-LOAM/src/imageProjection.cpp文件中,由groundRemoval函数实现。
void groundRemoval(){
size_t lowerInd, upperInd;
float diffX, diffY, diffZ, angle;
// groundMat
// -1, no valid info to check if ground of not
// 0, initial value, after validation, means not ground
// 1, ground
for (size_t j = 0; j < Horizon_SCAN; ++j){ //遍历列,e.g. 1800
for (size_t i = 0; i < groundScanInd; ++i){ //遍历行, e.g. 地面线束
//同一列相连两行的点云id
lowerInd = j + ( i )*Horizon_SCAN;
upperInd = j + (i+1)*Horizon_SCAN;
//如果所取的两点存在无效点,该点lowerInd或者(i,j)在点云地图groundMat中也为无效点
if (fullCloud->points[lowerInd].intensity == -1 ||
fullCloud->points[upperInd].intensity == -1){
// no info to check, invalid points
groundMat.at<int8_t>(i,j) = -1;
continue;
}
diffX = fullCloud->points[upperInd].x - fullCloud->points[lowerInd].x;
diffY = fullCloud->points[upperInd].y - fullCloud->points[lowerInd].y;
diffZ = fullCloud->points[upperInd].z - fullCloud->points[lowerInd].z;
// 相邻两条扫瞄线打在地面同一列的两点A([ax,ay,az]),B([bx,by,bz])
// 计算A,B高度差hz=|az-bz|,平面距离dxy=sqrt((ax-bx)^2 + (ay-by)^2)
// 计算hz,dxy构建的三角角度theta = atan2(hz,dxy)
angle = atan2(diffZ, sqrt(diffX*diffX + diffY*diffY) ) * 180 / M_PI;
if (abs(angle - sensorMountAngle) <= 10){
groundMat.at<int8_t>(i,j) = 1;
groundMat.at<int8_t>(i+1,j) = 1;
}
}
}
// extract ground cloud (groundMat == 1)
// mark entry that doesn't need to label (ground and invalid point) for segmentation
// note that ground remove is from 0~N_SCAN-1, need rangeMat for mark label matrix for the 16th scan
// 在labelMat中移除地面点和无效点,labelMat对所有点进行了聚类标记,
// 我们要在其中剔除地面点和无效点,无效点可以理解为未收到返回信号的点
for (size_t i = 0; i < N_SCAN; ++i){
for (size_t j = 0; j < Horizon_SCAN; ++j){
//如果为地面或者rangeMat为空,则标记为-1,后面去除这些点
if (groundMat.at<int8_t>(i,j) == 1 || rangeMat.at<float>(i,j) == FLT_MAX){
labelMat.at<int>(i,j) = -1;
}
}
}
//提取地面点存储到groundCloud
if (pubGroundCloud.getNumSubscribers() != 0){
for (size_t i = 0; i <= groundScanInd; ++i){
for (size_t j = 0; j < Horizon_SCAN; ++j){
if (groundMat.at<int8_t>(i,j) == 1)
groundCloud->push_back(fullCloud->points[j + i*Horizon_SCAN]);
}
}
}
}3. 看效果
代码实际运行后,订阅不同的topc可以看到分割效果:
- 订阅/rslidar_points可以看到原始点云。
- 订阅/ground_cloud查看提取出来的地面点。

- 订阅/segmented_cloud查看剔除地面点以后的点。

- 同时订阅/rslidar_points和/ground_cloud。

总的来说,未经优化直接使用地话在訪款雷达上地面分割效果不佳。主要表现在近处地面点提取不出来,误检的现象比较严重。
【参考】
Github:https://github.com/RobustFieldAutonomyLab/LeGO-LOAM
论文:https://github.com/RobustFieldAutonomyLab/LeGO-LOAM/blob/master/Shan_Englot_IROS_2018_Preprint.pdf
YouTube:https://www.youtube.com/watch?v=O3tz_ftHV48















 3922
3922











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









