









ImageUndistorted
引言
ch5.task4_2.3.
1.ImageUndistorted
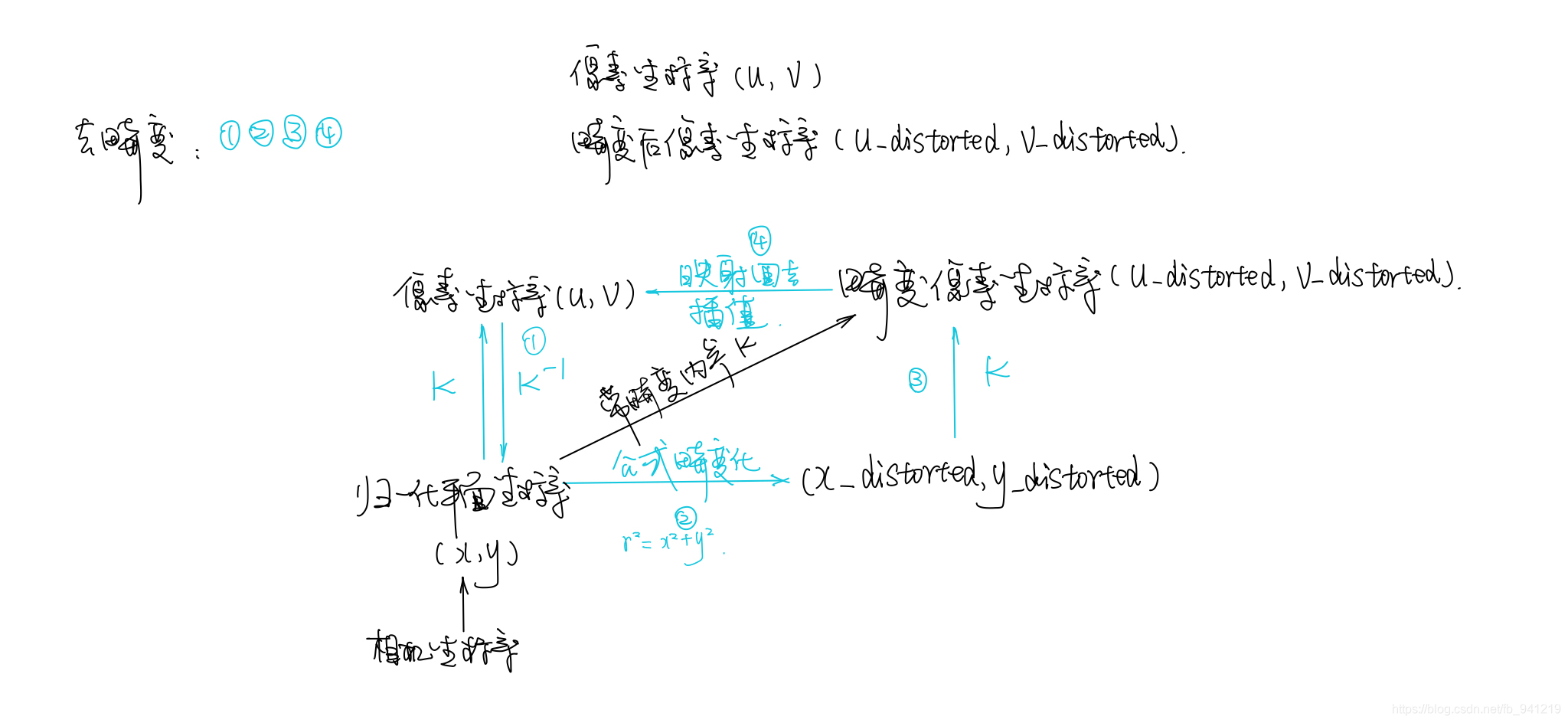
- 流程:
- code:
#include <opencv2/opencv.hpp>
#include <string>
using namespace std;
string image_file = "./../test.png";
int main(int argc, char **argv) {
// 畸变参数
double k1 = -0.28340811, k2 = 0.07395907, p1 = 0.00019359, p2 = 1.76187114e-05;
// 内参
double fx = 458.654, fy = 457.296, cx = 367.215, cy = 248.375;
cv::Mat image = cv::imread(image_file,0); // 图像是灰度图,CV_8UC1
int rows = image.rows, cols = image.cols;
cv::Mat image_undistort = cv::Mat(rows, cols, CV_8UC1); // 去畸变以后的图
// 计算去畸变后图像的内容:
//去畸变后 : u,v ;
//去畸变前 : u_distorted, v_distorted
for (int v = 0; v < rows; v++)
for (int u = 0; u < cols; u++) {
double u_distorted = 0, v_distorted = 0;//去畸变前像素坐标
// TODO 按照公式,计算点(u,v)对应到畸变图像中的坐标(u_distorted, v_distorted) (~6 lines)
// 1. back project to normilized image coordinate (归一化坐标z=1)
double x = (u - cx) / fx;//去畸变后的像素坐标转换到归一化坐标系
double y = (v - cy) / fy;
// 2. apply distortion formula, in meter scale
double r2 = x*x + y*y; //r表示点P离坐标系原点的距离
double x_distorted = 0, y_distorted = 0;
//归一化坐标系
x_distorted = x*(1 + k1*r2 + k2*r2*r2) + 2*p1*x*y + p2*(r2 + 2*x*x);
y_distorted = y*(1 + k1*r2 + k2*r2*r2) + p1*(r2 + 2*y*y) + 2*p2*x*y;
//畸变后的像素坐标系
// 3. project it back to pixel coordinates 投影回像素坐标
u_distorted = fx*x_distorted + cx;
v_distorted = fy*y_distorted + cy;
// 赋值 (最近邻插值)
if (u_distorted >= 0 && v_distorted >= 0 && u_distorted < cols && v_distorted < rows) {
image_undistort.at<uchar>(v, u) = image.at<uchar>((int) v_distorted, (int) u_distorted);//逆向赋值
} else {
image_undistort.at<uchar>(v, u) = 0;//一些边缘的处理
}
}
// 画图去畸变后图像
cv::imshow("image undistorted", image_undistort);
cv::waitKey();
return 0;
}
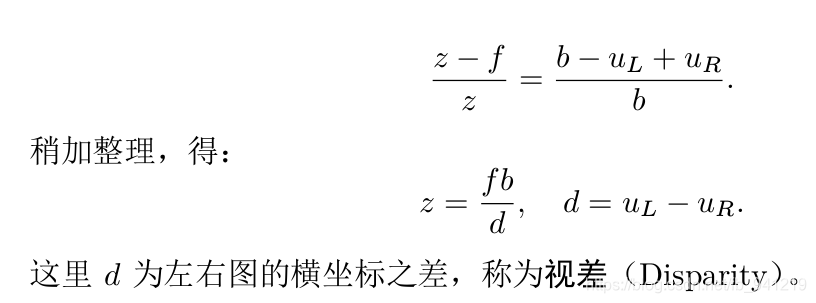
2.Disparity
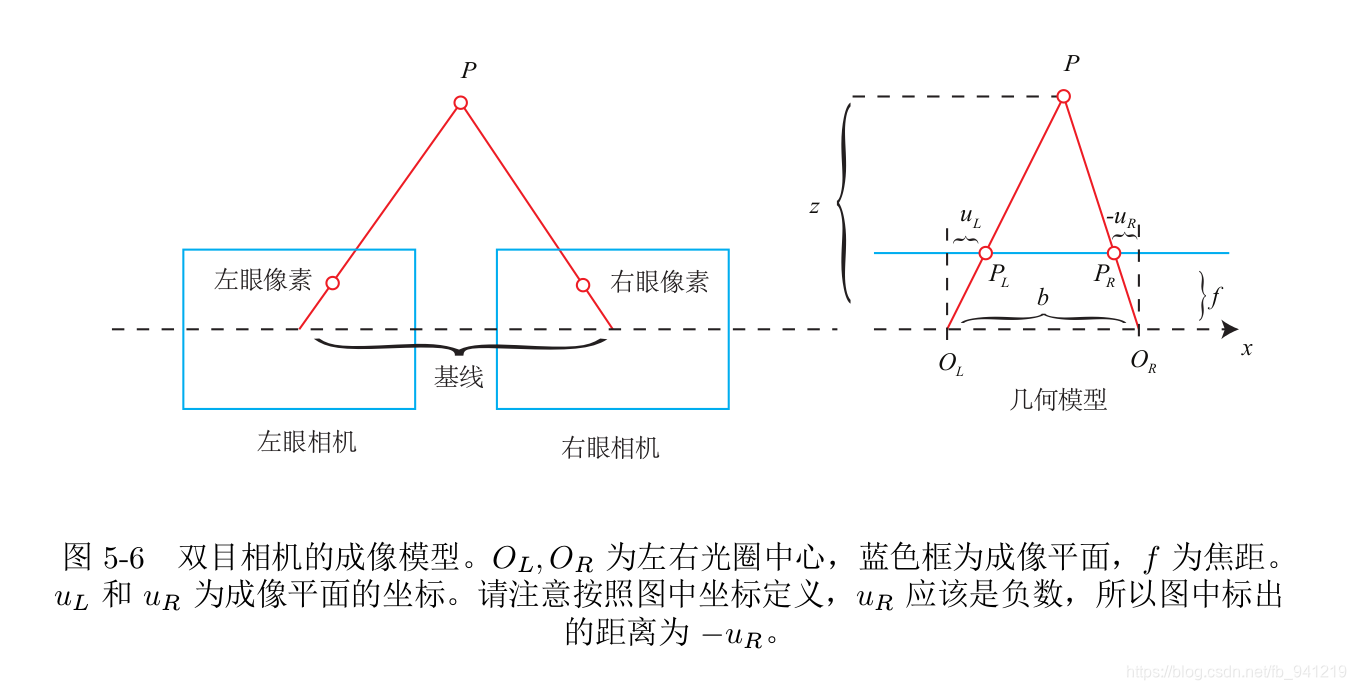
注意此处视差图,和师兄讨论得:
- 若是在像素坐标系则 d = U L − U R ; z = f x b / d d=U_L - U_R; z=f_xb/d d=UL−UR;z=fxb/d,此时 f x , d f_x,d fx,d的单位均为像素,故z的单位是由b决定.
- 若是在图像坐标系则 d = X L − X R ; z = f b / d d=X_L - X_R; z=fb/d d=XL−XR;z=fb/d,此时 f , d f,d f,d的单位均为米,故z的单位同样是由b决定.
若基线b的单位为mm(一般情况下都是毫米):
- 读取视差图值的时候注意d的单位,一般是在像素坐标系下。则d的单位为像素以
unsigned char pixel_disparity = disparity.ptr<unsigned char> (v)[u];方式读取. - 若d的单位不是像素,则需要与
f
f
f的单位统一(
f
f
f的单位一般为米),若d的单位读进来为mm,则需要尺度因子1000做转换(除以1000化为米).
unsigned int d = depth.ptr ( v )[u];
depthScale = 1000;
point[2] = double(d)/depthScale;
code:
#include <opencv2/opencv.hpp>
#include <string>
#include <Eigen/Core>
#include <pangolin/pangolin.h>
#include <unistd.h>
using namespace std;
using namespace Eigen;
string left_file = "./../left.png";
string right_file = "./../right.png";
string disparity_file = "./../disparity.png";
// 在panglin中画图
void showPointCloud(const vector<Vector4d, Eigen::aligned_allocator<Vector4d>> &pointcloud);
int main(int argc, char **argv) {
// 内参
double fx = 718.856, fy = 718.856, cx = 607.1928, cy = 185.2157;
// 间距 baseline = 0.573 m
double d = 0.573;
//double depthScale = 1000.0;
// 读取图像
cv::Mat left = cv::imread(left_file, 0);
cv::Mat right = cv::imread(right_file, 0);
cv::Mat disparity = cv::imread(disparity_file, 0); // disparty 为CV_8U,单位为像素,这一句是关键,单位为像素,则说明在是在像素坐标系下
// 生成点云
vector<Vector4d, Eigen::aligned_allocator<Vector4d>> pointcloud;
// TODO 根据双目模型计算点云
// 如果你的机器慢,请把后面的v++和u++改成v+=2, u+=2
for (int v = 0; v < left.rows; v++)
for (int u = 0; u < left.cols; u++) {
Vector4d point(0, 0, 0, left.at<uchar>(v, u) / 255.0); // 前三维为xyz,第四维为颜色
// start your code here (~6 lines)
// disparity map is 8-bit value
// unsigned short: 16bit
// unsigned char: 8bit
//unsigned int disp = disparity.ptr<unsigned short>(v)[u]; 特别注意这一句,肖使用的这一句,然后加入了尺度因子1000,也能得到深度点云,但是有误,
//记得自己之前做的时候也是加入了尺度因子的,这里需要小心,使用uchar型读取数据!!!
unsigned char pixel_disparity = disparity.ptr<unsigned char> (v)[u]; // 深度值,一种访问像素的方式(视差图!!)
//Eigen::Vector3d point; 毫米下计算
//point[2] = fx * d / double(pixel_disparity);
point[2] = (fx * d )/ pixel_disparity;
point[0] = (u-cx)*point[2]/fx;
point[1] = (v-cy)*point[2]/fy;
pointcloud.push_back(point);
//Vector3d pointWorld = T*point;
//z = fx*d/ disparity.at<v,u>;
// 根据双目模型计算 point 的位置
// end your code here
}
// 画出点云
showPointCloud(pointcloud);
return 0;
}
void showPointCloud(const vector<Vector4d, Eigen::aligned_allocator<Vector4d>> &pointcloud) {
if (pointcloud.empty()) {
cerr << "Point cloud is empty!" << endl;
return;
}
pangolin::CreateWindowAndBind("Point Cloud Viewer", 1024, 768);
glEnable(GL_DEPTH_TEST);
glEnable(GL_BLEND);
glBlendFunc(GL_SRC_ALPHA, GL_ONE_MINUS_SRC_ALPHA);
pangolin::OpenGlRenderState s_cam(
pangolin::ProjectionMatrix(1024, 768, 500, 500, 512, 389, 0.1, 1000),
pangolin::ModelViewLookAt(0, -0.1, -1.8, 0, 0, 0, 0.0, -1.0, 0.0)
);
pangolin::View &d_cam = pangolin::CreateDisplay()
.SetBounds(0.0, 1.0, pangolin::Attach::Pix(175), 1.0, -1024.0f / 768.0f)
.SetHandler(new pangolin::Handler3D(s_cam));
while (pangolin::ShouldQuit() == false) {
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);
d_cam.Activate(s_cam);
glClearColor(1.0f, 1.0f, 1.0f, 1.0f);
glPointSize(2);
glBegin(GL_POINTS);
for (auto &p: pointcloud) {
glColor3f(p[3], p[3], p[3]);
glVertex3d(p[0], p[1], p[2]);
}
glEnd();
pangolin::FinishFrame();
usleep(5000); // sleep 5 ms
}
return;
}
EwenwanVersion: 没有使用已知的视差图,直接采用的左右图像使用OpenCV库里面的匹配算法进行匹配然后得到视差图,再计算RGBD图像。
#include <opencv2/opencv.hpp>
#include <string>
#include <Eigen/Core>
#include <pangolin/pangolin.h>
#include <unistd.h>
using namespace std;
using namespace Eigen;
using namespace cv;
/**************立体匹配算法**************
@@BM:Block Matching ,采用SAD方法计算匹配代价;
@@SGBM:修改自Heiko Hirschmuller的《Stereo Processing by Semi-global Matching and Mutual Information》;
与原方法不同点: 没有实现原文中基于互信息的匹配代价计算,而是采用BT算法("Depth Discontinuities by Pixel-to-Pixel Stereo" by S. Birchfield and C. Tomasi); 默认运行单通道DP算法,只用了5个方向,而fullDP使能时则使用8个方向(可能需要占用大量内存); 增加了一些BM算法中的预处理和后处理程序;
@@GC:OpenCV3.0中没有实现,可以在OpenCV以下版本中找到。该方法效果是最好的,但是速度太慢,不能达到实时的匹配效率;
视差效果:BM < SGBM < GC;
处理速度:BM > SGBM > GC ;
************************/
// 在panglin中画图
void showPointCloud(const vector<Vector4d, Eigen::aligned_allocator<Vector4d>> &pointcloud);
int main(int argc, char **argv) {
// 内参
double fx = 718.856, fy = 718.856, cx = 607.1928, cy = 185.2157;
// 间距
double d = 0.573;
double a = 0.00375;//像元尺寸,单位像素每米!!!
// 读取图像
cv::Mat left = cv::imread("./../left.png", 0);
cv::Mat right = cv::imread("./../right.png", 0);
cv::Mat disp;
/SGBM双目匹配算法///
int mindisparity = 0;
int ndisparities = 64;
int SADWindowSize = 11;
//SGBM
cv::Ptr<cv::StereoSGBM> sgbm = cv::StereoSGBM::create(mindisparity, ndisparities, SADWindowSize);
int P1 = 8 * left.channels() * SADWindowSize* SADWindowSize;
int P2 = 32 * left.channels() * SADWindowSize* SADWindowSize;
sgbm->setP1(P1);
sgbm->setP2(P2);
sgbm->setPreFilterCap(15);
sgbm->setUniquenessRatio(10);
sgbm->setSpeckleRange(2);
sgbm->setSpeckleWindowSize(100);
sgbm->setDisp12MaxDiff(1);
//sgbm->setMode(cv::StereoSGBM::MODE_SGBM_3WAY);
sgbm->compute(left, right, disp);
disp.convertTo(disp, CV_32F, 1.0 / 16); //除以16得到真实视差值
Mat disp8U = Mat(disp.rows, disp.cols, CV_8UC1); //显示
normalize(disp, disp8U, 0, 255, NORM_MINMAX, CV_8UC1);
imwrite("../SGBM_disp.png", disp8U);
//读入视差图,注意视差图不是深度图
cv::Mat disparity = cv::imread("../disparity.png", 0); // disparty 为CV_8U,单位为像素!!!!!
//cv::Mat disparity = cv::imread("../SGBM_disp.png", 0); // disparty 为CV_8U,单位为像素!!!!!
// 生成点云
vector<Vector4d, Eigen::aligned_allocator<Vector4d>> pointcloud;
// TODO 根据双目模型计算点云
for (int v = 0; v < left.rows; v++)
for (int u = 0; u < left.cols; u++) {
Vector4d point(0, 0, 0, left.at<uchar>(v, u) / 255.0); // 前三维为xyz,第四维为颜色
double f = a*fx;//统一单位!!
// start your code here (~6 lines)
double depth = ( f * d) / (disparity.at<uchar>(v,u)); //Z
// double depth = disparity.at<uchar>(v,u);
// double dis = left.at<uchar>(v, u) - right.at<uchar>(v, u);
// double f = depth - depth*((d - dis)/d);
point[2] = depth; // 这里视差直接用的像素点间的像素差,这样对吗???
point[0] = (u-cx)*point[2]/fx; //对归一化后的坐标需要乘以Z也就是深度信息!!
point[1] = (v-cy)*point[2]/fy;
pointcloud.push_back(point);
// end your code here
}
// 画出点云
showPointCloud(pointcloud);
return 0;
}
void showPointCloud(const vector<Vector4d, Eigen::aligned_allocator<Vector4d>> &pointcloud) {
if (pointcloud.empty()) {
cerr << "Point cloud is empty!" << endl;
return;
}
pangolin::CreateWindowAndBind("Point Cloud Viewer", 1024, 768);
glEnable(GL_DEPTH_TEST);
glEnable(GL_BLEND);
glBlendFunc(GL_SRC_ALPHA, GL_ONE_MINUS_SRC_ALPHA);
pangolin::OpenGlRenderState s_cam(
pangolin::ProjectionMatrix(1024, 768, 500, 500, 512, 389, 0.1, 1000),
pangolin::ModelViewLookAt(0, -0.1, -1.8, 0, 0, 0, 0.0, -1.0, 0.0)
);
pangolin::View &d_cam = pangolin::CreateDisplay()
.SetBounds(0.0, 1.0, pangolin::Attach::Pix(175), 1.0, -1024.0f / 768.0f)
.SetHandler(new pangolin::Handler3D(s_cam));
while (pangolin::ShouldQuit() == false) {
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);
d_cam.Activate(s_cam);
glClearColor(1.0f, 1.0f, 1.0f, 1.0f);
glPointSize(2);
glBegin(GL_POINTS);
for (auto &p: pointcloud) {
glColor3f(p[3], p[3], p[3]);
glVertex3d(p[0], p[1], p[2]);
}
glEnd();
pangolin::FinishFrame();
usleep(5000); // sleep 5 ms
}
return;
}















 811
811

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









