







机器人运动轨迹的查看,只有在“仿真”菜单运行才能看到。
1、代码编写
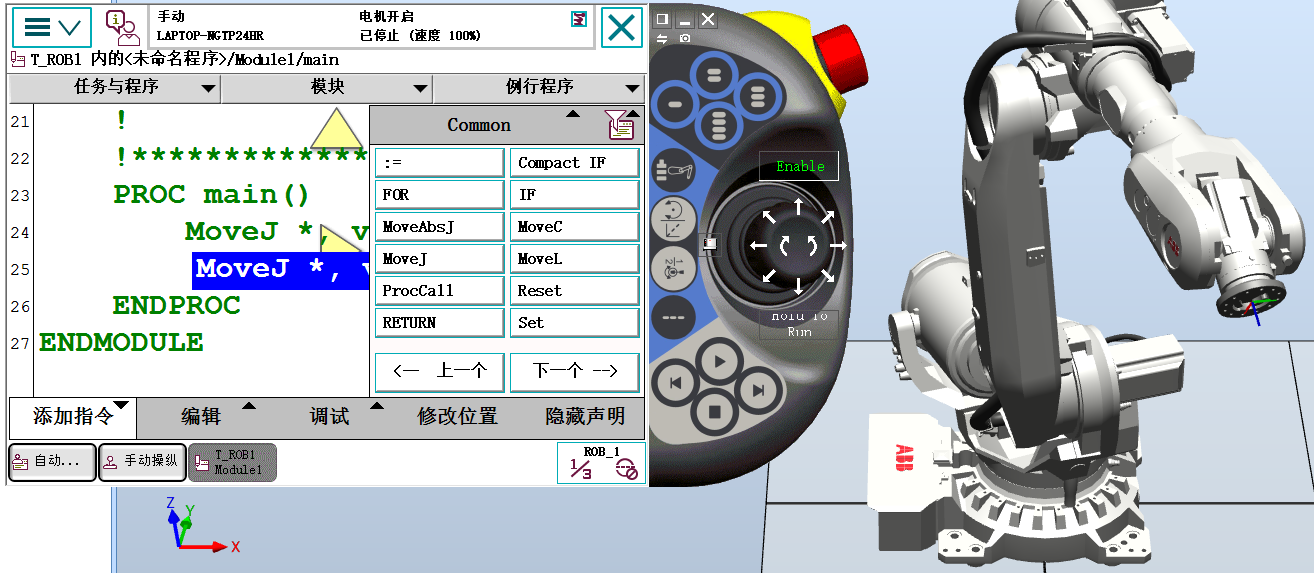
先将机器人手动运行到一个位置,通过“添加指令”中的MoveJ记录这个位置,其中的“*”表示此时的位置坐标,可以通过修改名字来代替“*”,这样可读性更强
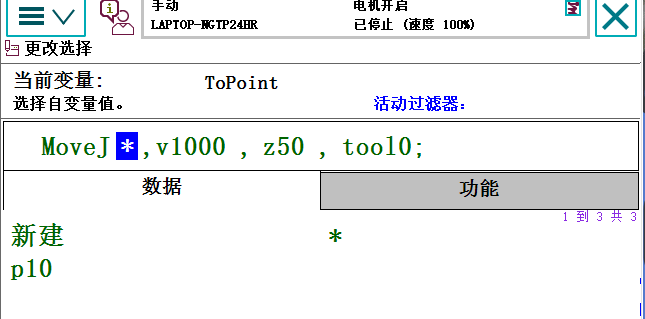
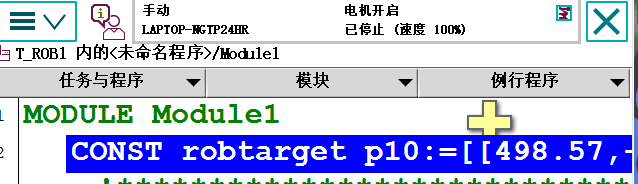
点击“新建”,为这个地址添加一个名称(P10)。此时在代码上就会添加一条robtarget变量类型的常量P10
然后手动将机器人移动到另一个目标点,加入MoveJ指令。
可以通过“修改位置”来重新定义目标点的坐标。
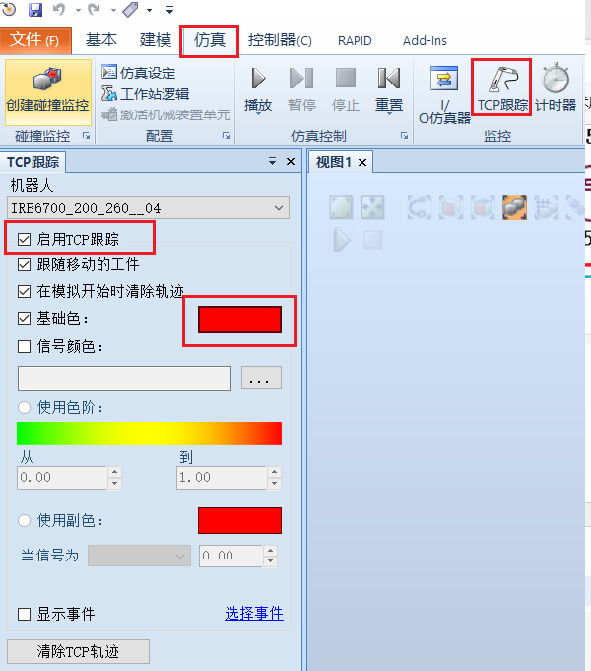
2、显示轨迹
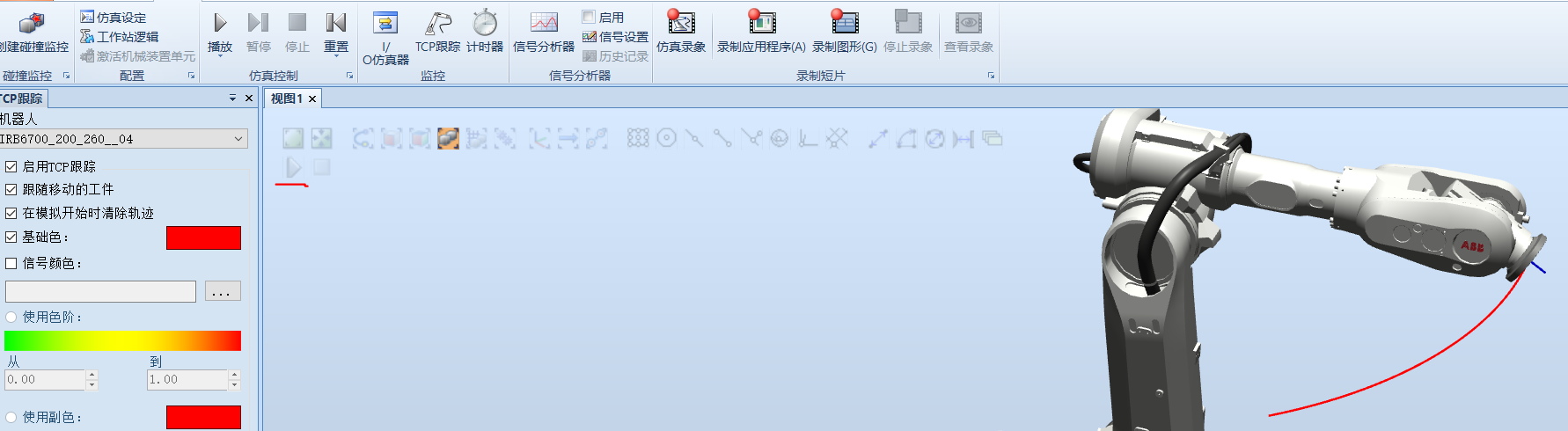
点击“仿真”菜单------“TCP跟踪”-----“启用TCP跟踪”
点击“播放”,就可以看到运行的轨迹。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









