







目录
欧拉角转旋转矩阵(右手定则逆时针旋转)
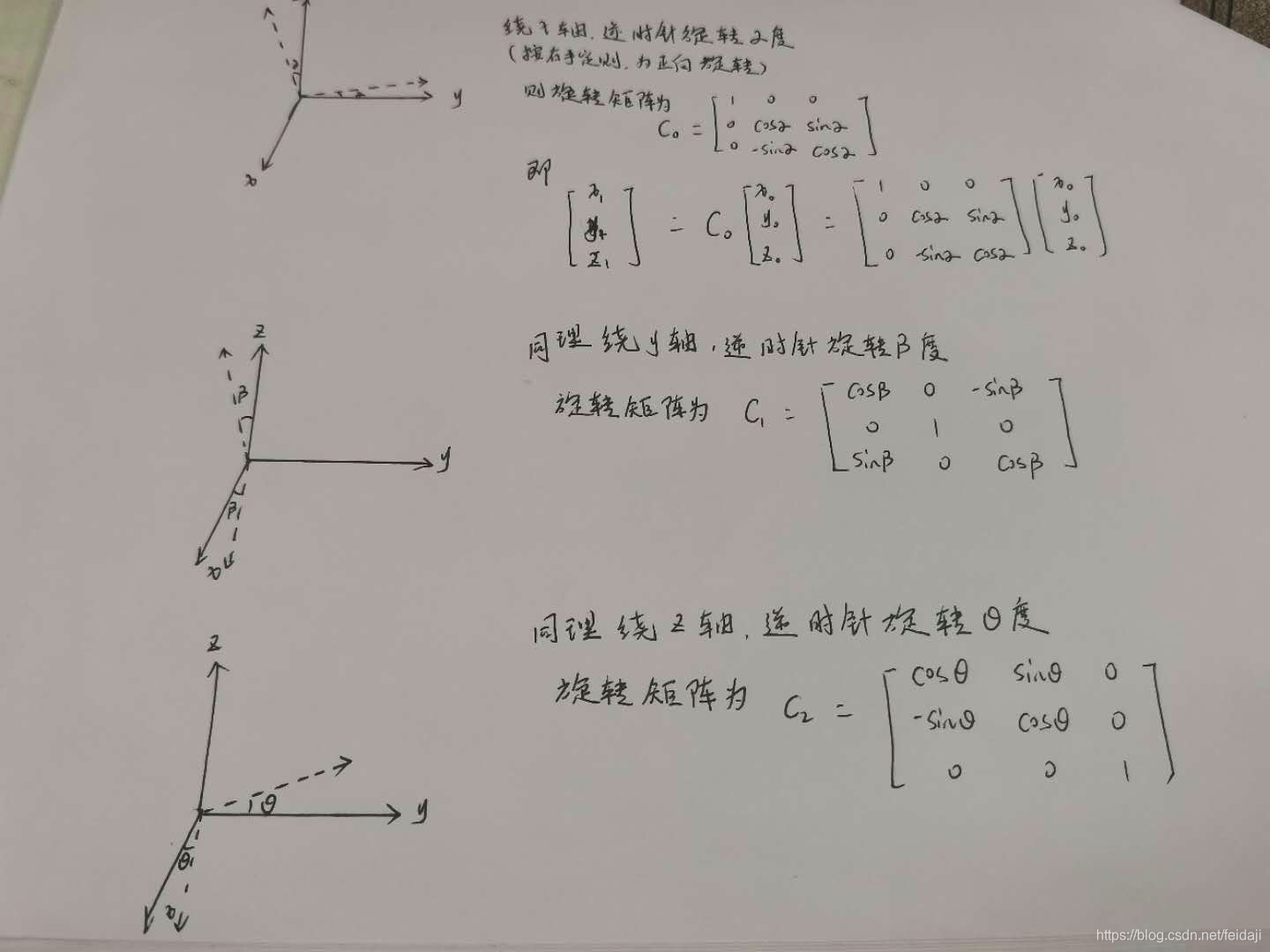
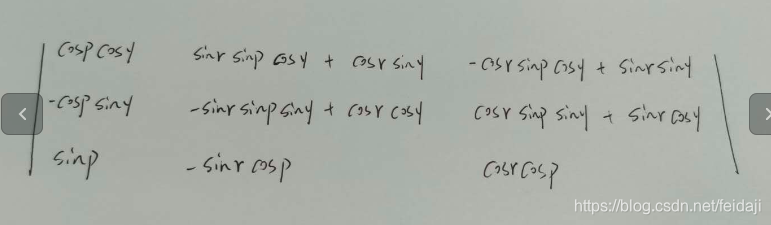
因此,从一个坐标系oxyz 转换到另一个坐标系txyz, 转换矩阵为:
欧拉角转换乘矩阵,一个点(1,0,0) 从一个坐标系转换到另一个坐标系下的例子如下
(自己写的初始例子)
#include <iostream>
#include <cmath>
using namespace std;
/*
作用:2个3x3 矩阵点乘,
输入: 3x3矩阵m1, 3x3矩阵m2
输出: 矩阵m1 点乘 m2 后的3x3 矩阵m_target
*/
void matrixDot(float m1[][3], float m2[][3],float (*m_target)[3] )
{
//float m_target[3][3];
m_target[0][0]=m1[0][0]*m2[0][0]+m1[0][1]*m2[1][0]+m1[0][2]*m2[2][0];
m_target[0][1]=m1[0][0]*m2[0][1]+m1[0][1]*m2[1][1]+m1[0][2]*m2[2][1];
m_target[0][2]=m1[0][0]*m2[0][2]+m1[0][1]*m2[1][2]+m1[0][2]*m2[2][2];
m_target[1][0]=m1[1][0]*m2[0][0]+m1[1][1]*m2[1][0]+m1[1][2]*m2[2][0];
m_target[1][1]=m1[1][0]*m2[0][1]+m1[1][1]*m2[1][1]+m1[1][2]*m2[2][1];
m_target[1][2]=m1[1][0]*m2[0][2]+m1[1][1]*m2[1][2]+m1[1][2]*m2[2][2];
m_target[2][0]=m1[2][0]*m2[0][0]+m1[2][1]*m2[1][0]+m1[2][2]*m2[2][0];
m_target[2][1]=m1[2][0]*m2[0][1]+m1[2][1]*m2[1][1]+m1[2][2]*m2[2][1];
m_target[2][2]=m1[2][0]*m2[0][2]+m1[2][1]*m2[1][2]+m1[2][2]*m2[2][2];
//return m_target;
}
/*
作用:点point 左乘旋转3x3矩阵matrix, 从一个坐标系转换到另一个坐标系的点
输入: 3x3旋转矩阵matrix, 起始点point, 是一个3x1的矩阵
输出: 3x1 目标点target_point
*/
void matrixDot(float matrix[][3], float point[][1],float (*target_point)[1] )
{
//float m_target[3][3];
target_point[0][0]=matrix[0][0]*point[0][0]+matrix[0][1]*point[1][0]+matrix[0][2]*point[2][0];
target_point[1][0]=matrix[1][0]*point[0][0]+matrix[1][1]*point[1][0]+matrix[1][2]*point[2][0];
target_point[2][0]=matrix[2][0]*point[0][0]+matrix[2][1]*point[1][0]+matrix[2][2]*point[2][0];
}
/*
作用: 欧拉角转换成旋转矩阵,顺序是先绕x轴逆时针(正向)旋转roll 角, 再绕y 轴逆时针旋转pitch 角
最后绕z轴逆时针旋转yaw 角,注意必须按顺序旋转,顺序不同,结果不一样
参数&#x 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 663
663

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









