









openTCS的控制核心是kernel,其内部有三种算法,分别为Dispater、Router、Scheduler。
本文主要介绍如何利用openTCS的plant overview平台进行基本的操作,主要内容来源于该软件内自带的opentcs-users-guide手册。
启动客户端
openTCS-Kernel、openTCS-ModelEditor, openTCS-KernelControlCenter、openTCS-OperationsDesk 以完成平台启动.
我们先启动openTCS-Kernel
双击startKennel.bat
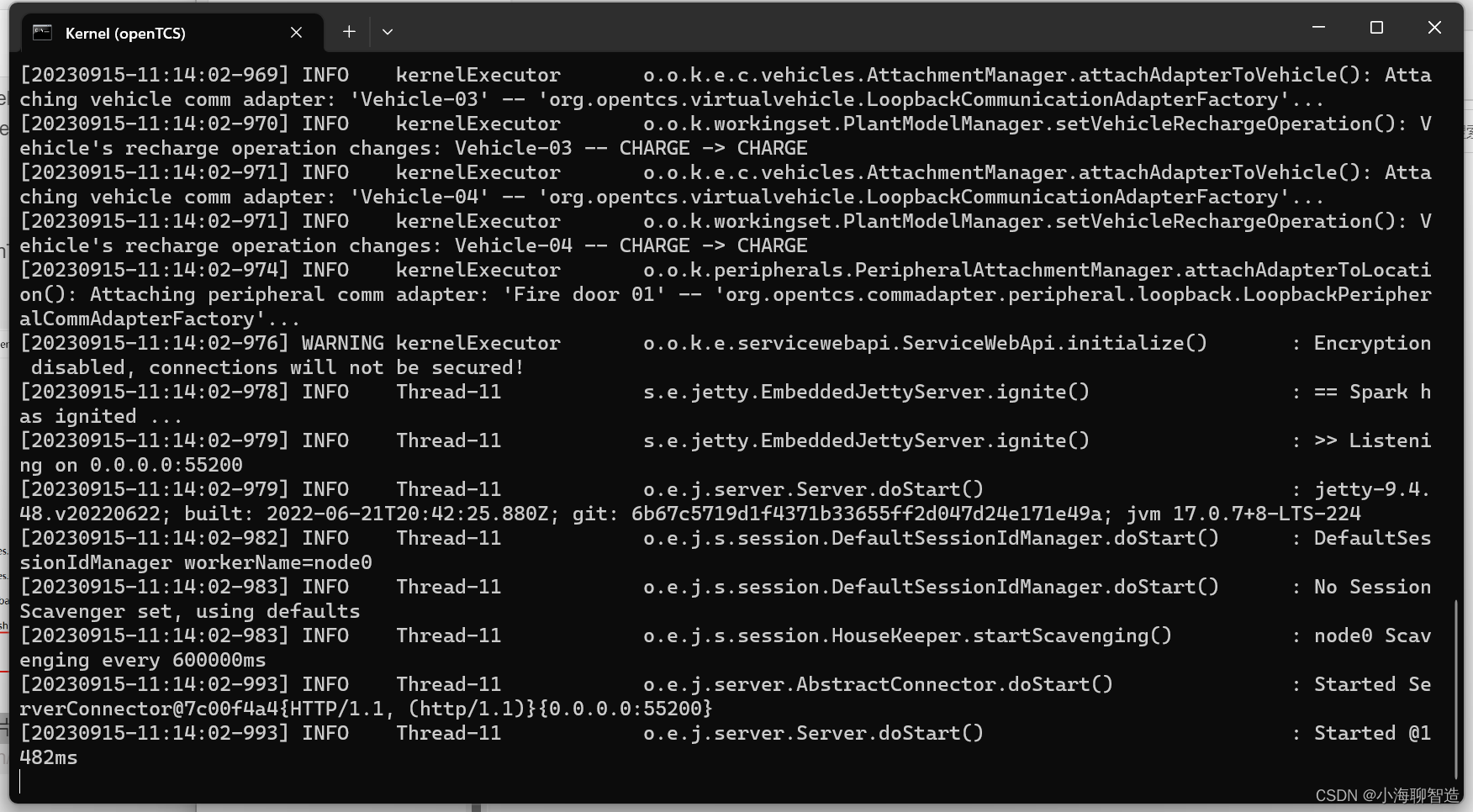
启动成功如下
接下来启动地图及基础配置模块
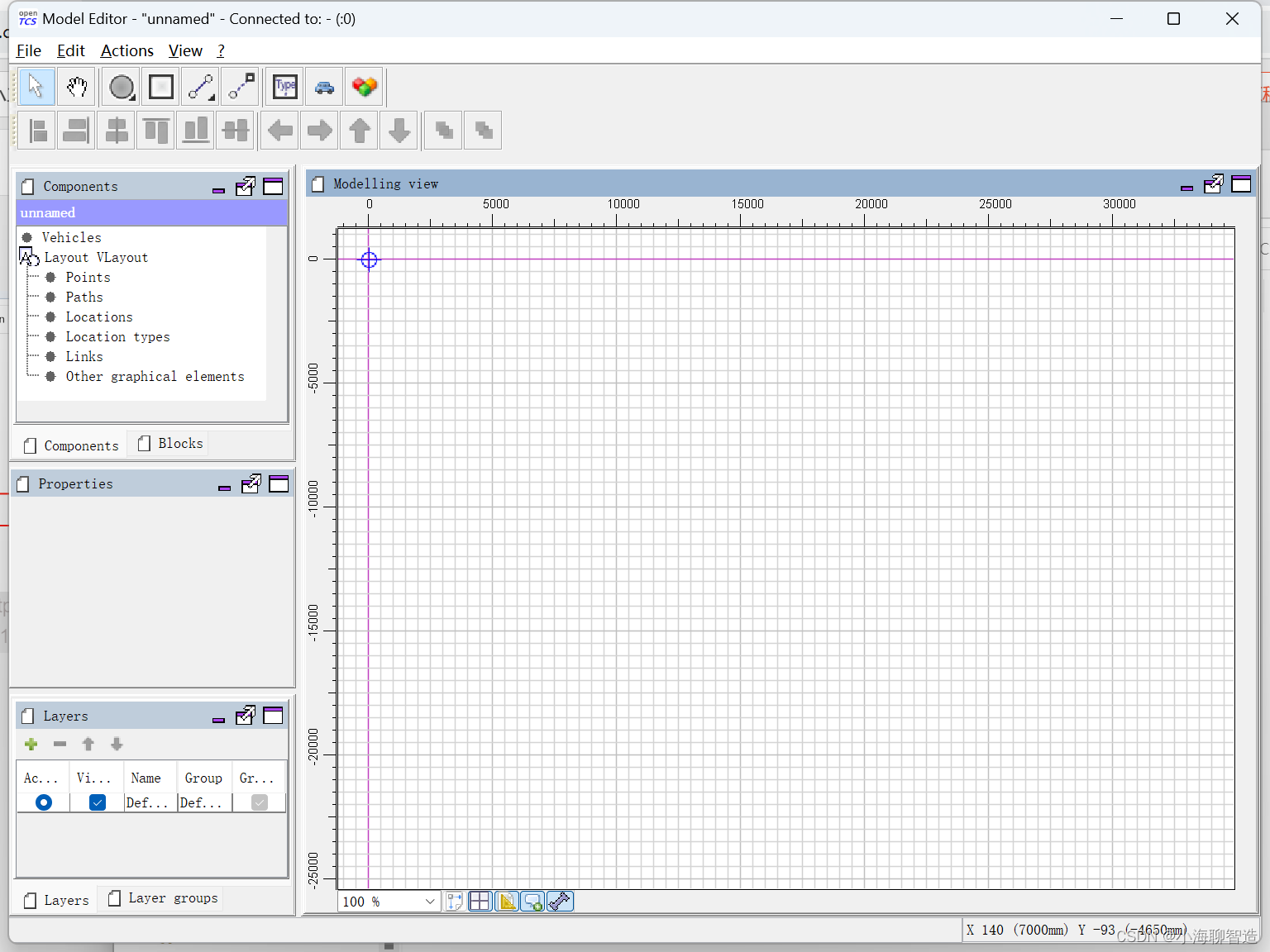
启动成功后会有这么个appclition 弹出
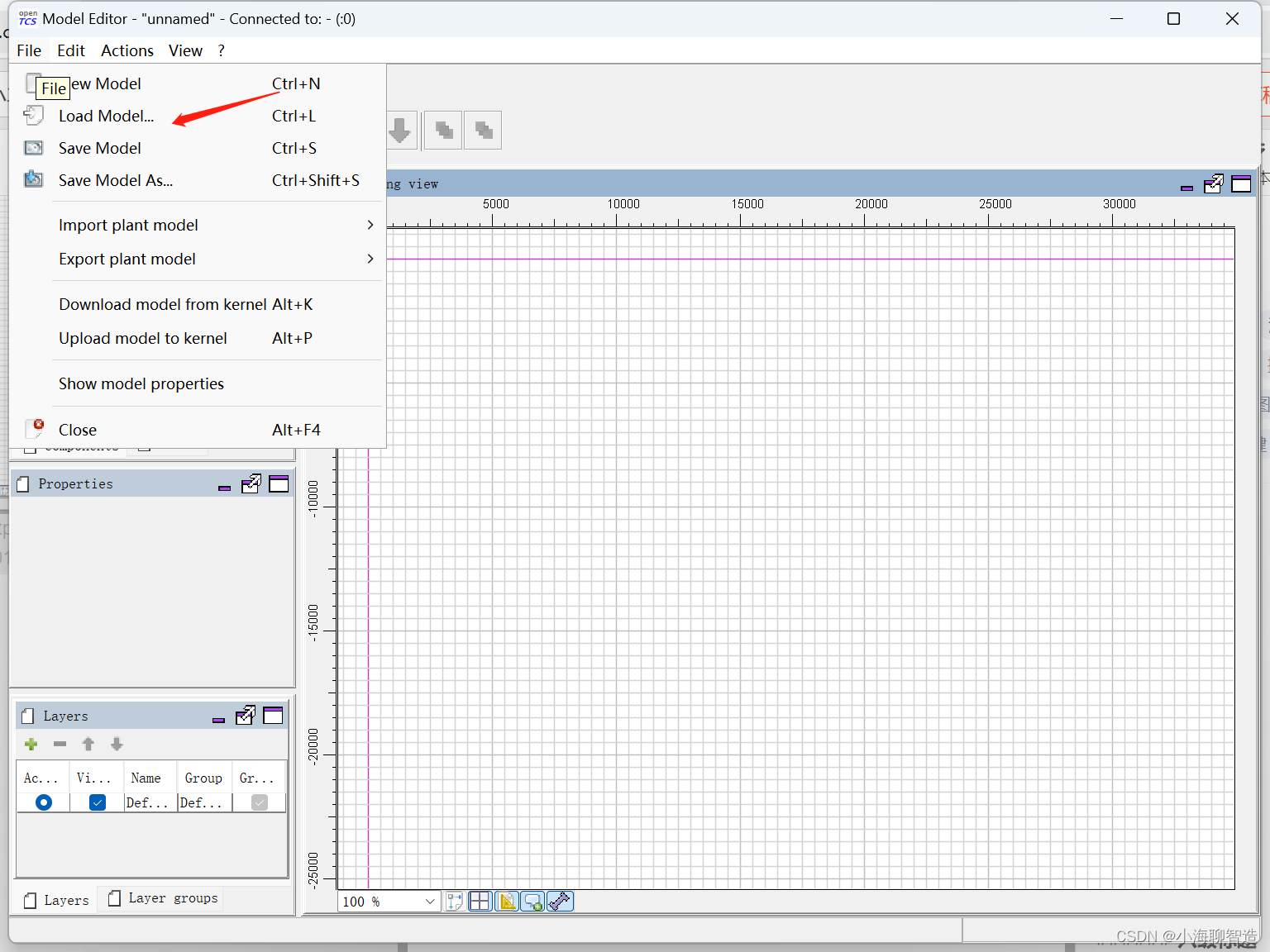
后续讲解各个功能菜单的作用,这里我们先导入 原有的demo
点击file,loadmodel
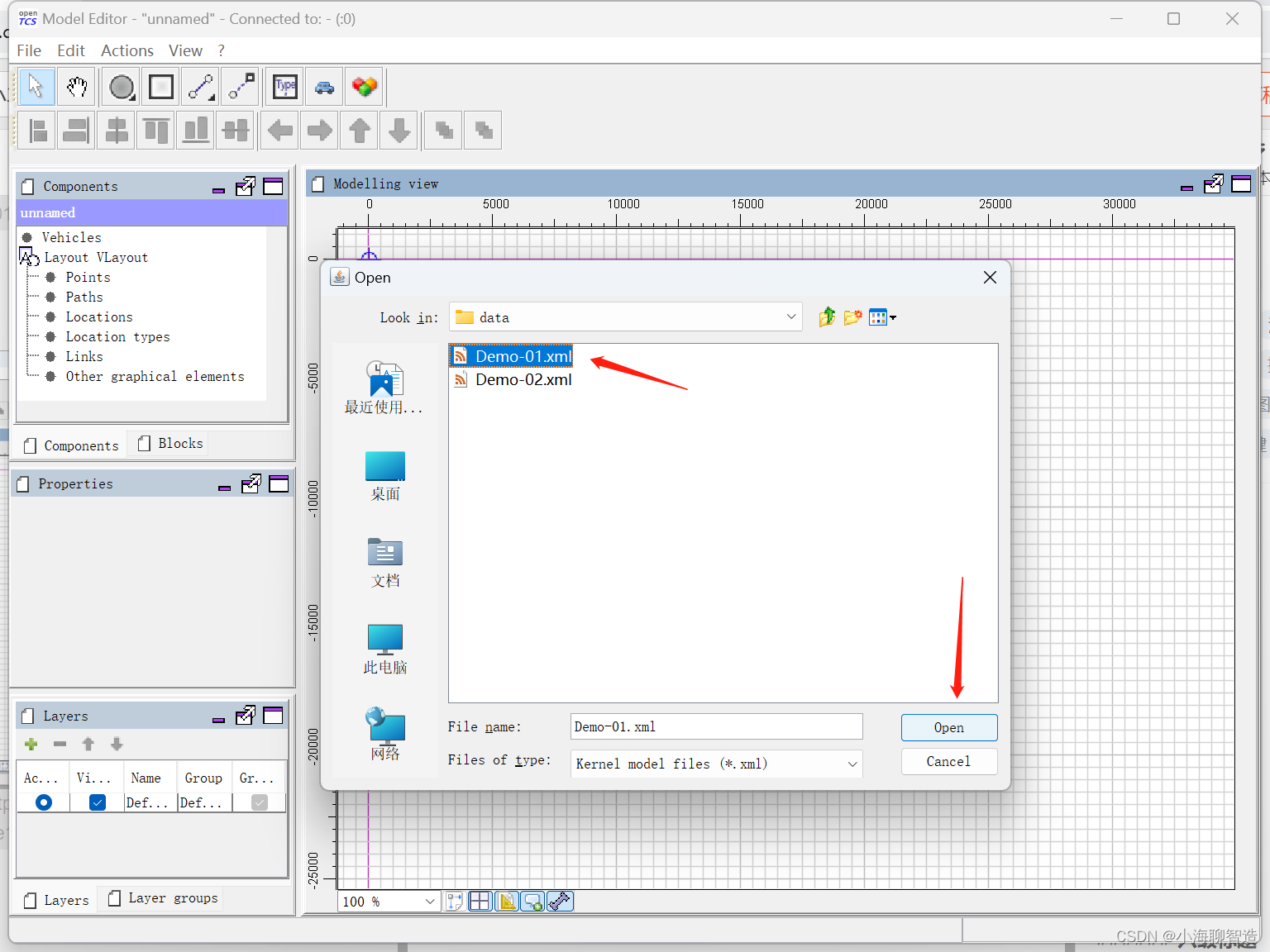
导入后
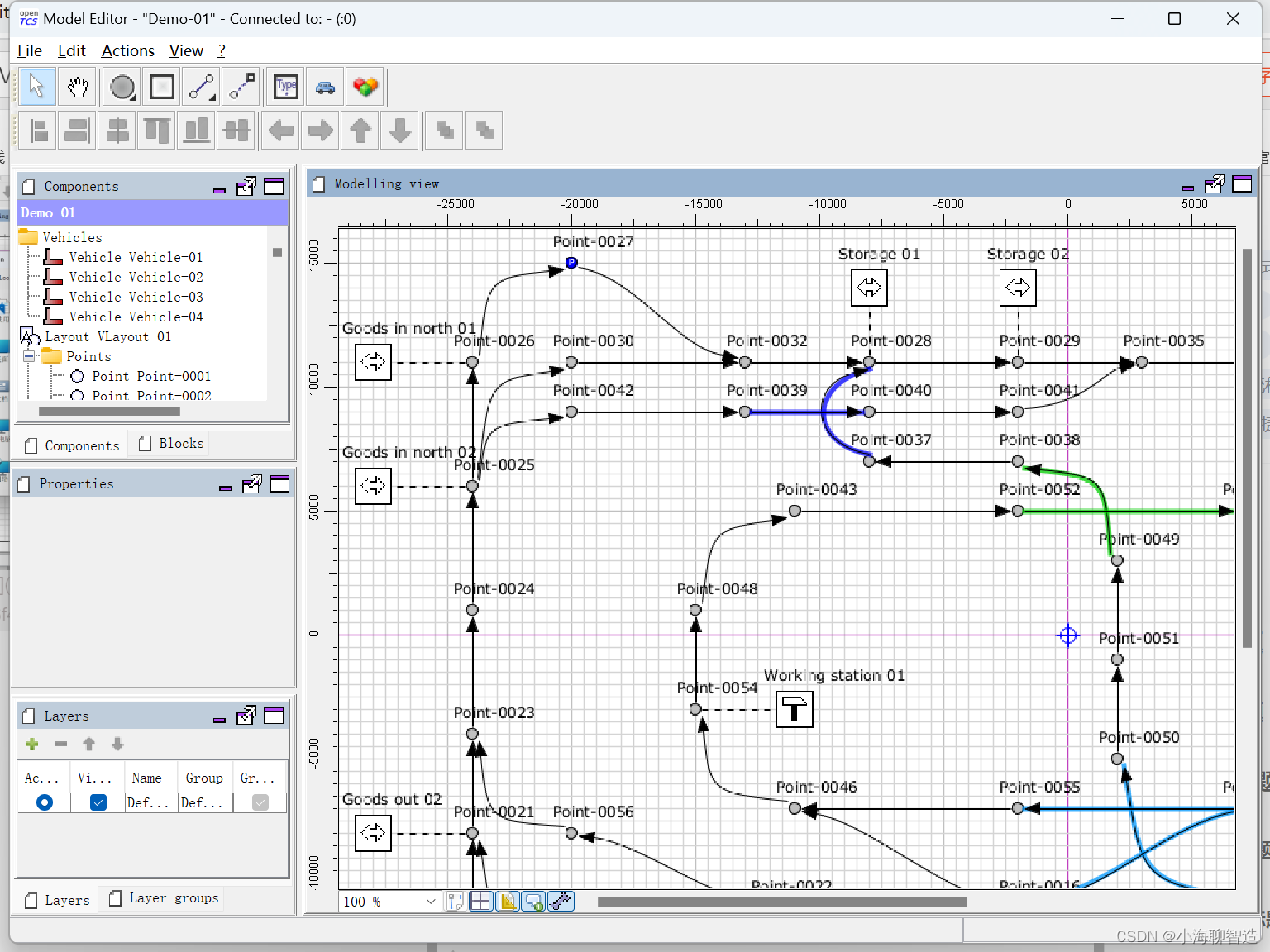
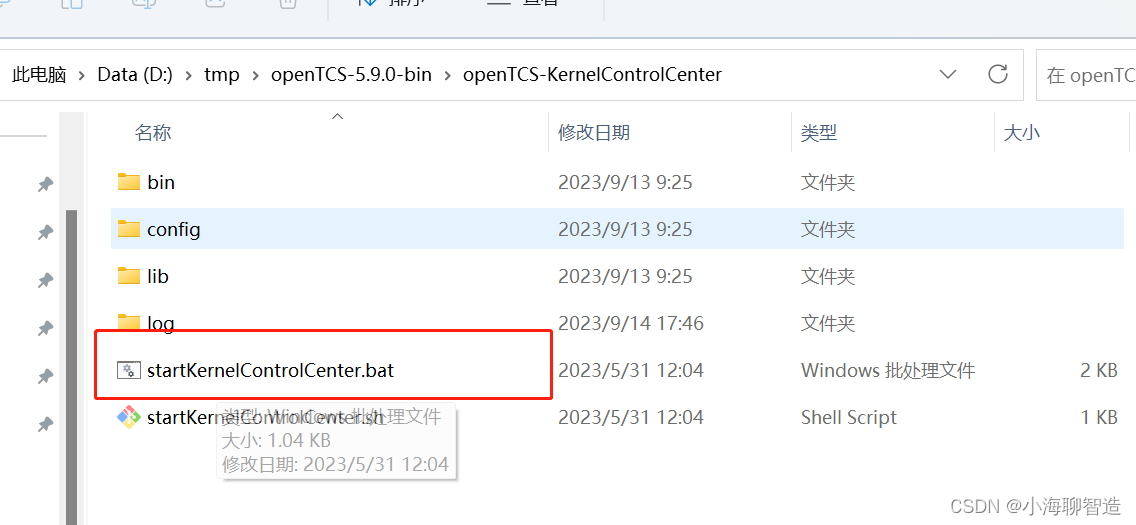
因为是导入的demo 模型文件,我们先不用管这个,继续启动openTCS-KernelControlCenter(控制中心)
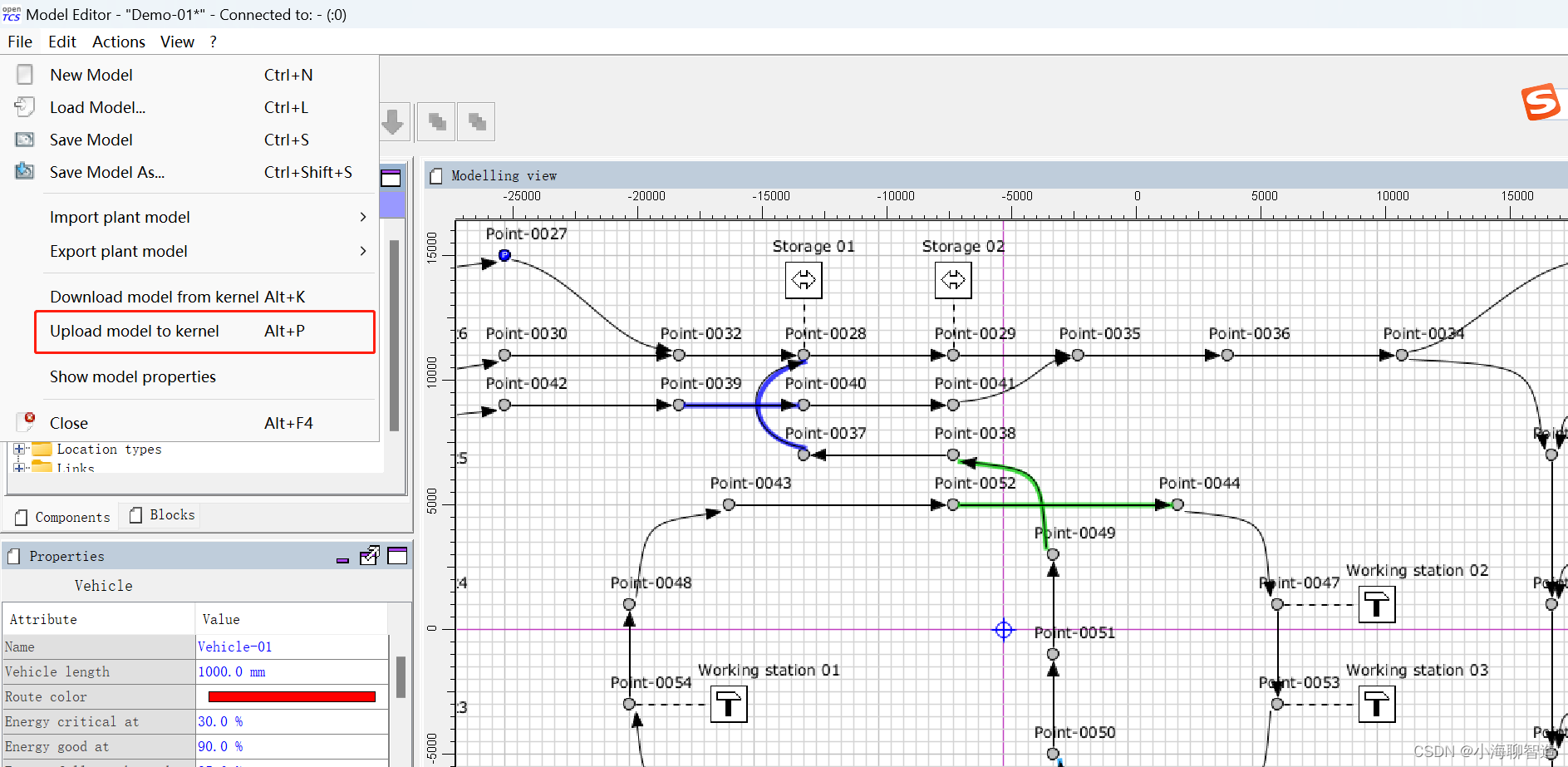
刚开始导入这里是空的,因为我前面试过了,所以这里有数据。回到Model Edit ,导入模型到控制中心。
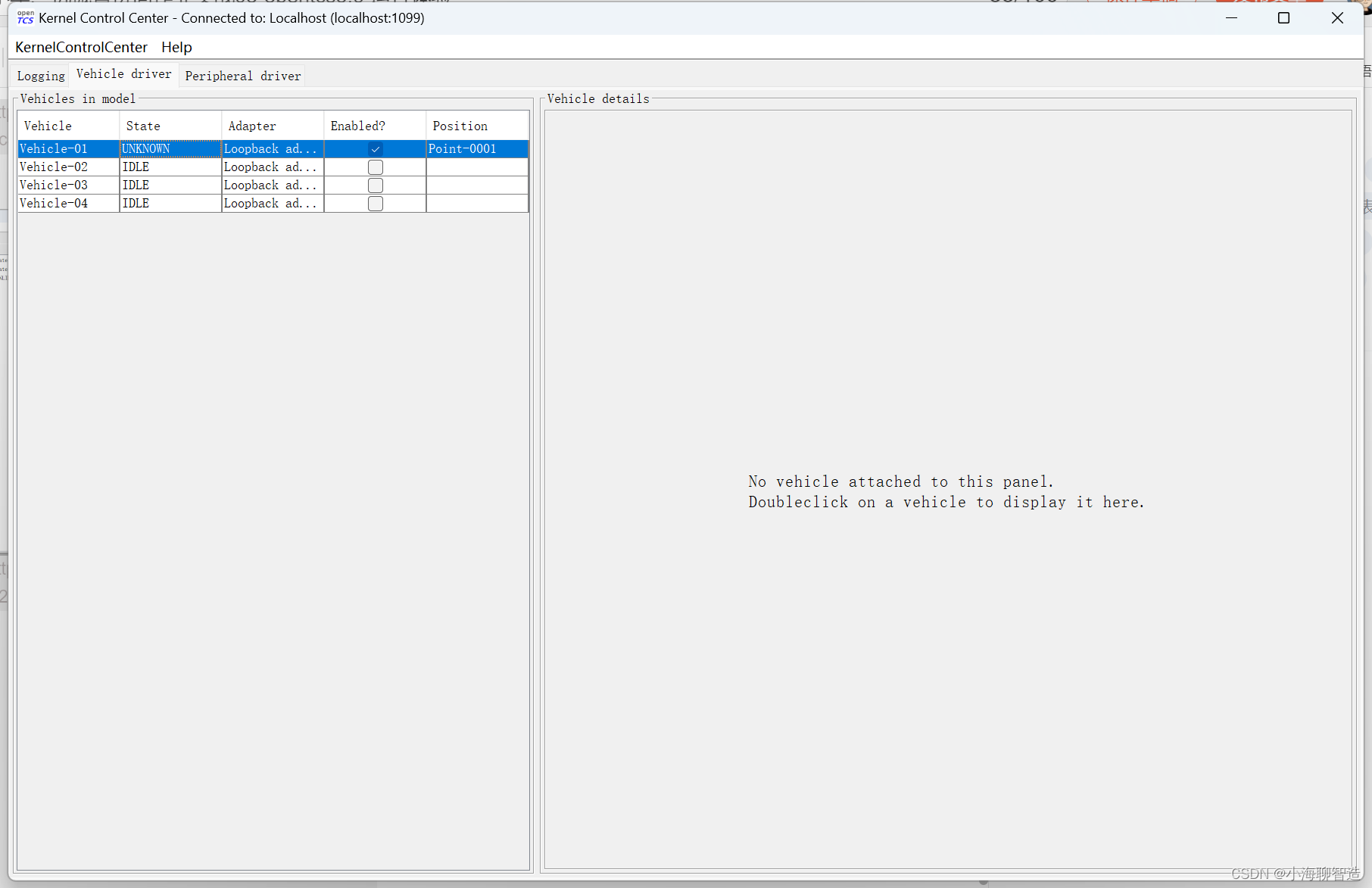
再回到 Kernel Contro Center ,查看小车驱动就已经有车子的显示了
效果就是如下:
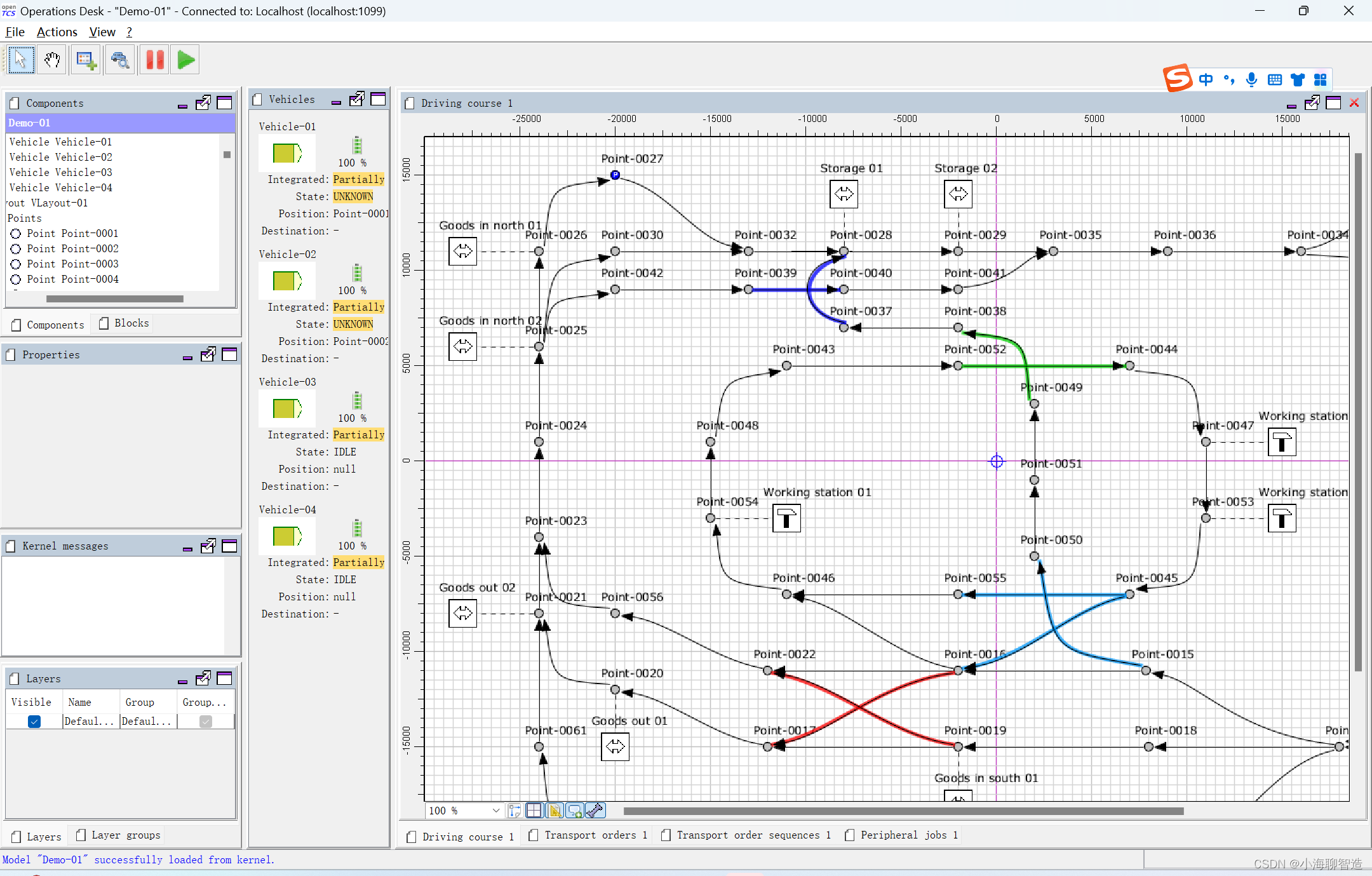
再接下来我们就要启动 桌面运行监控系统\openTCS-OperationsDesk
运行后会弹出如下程序
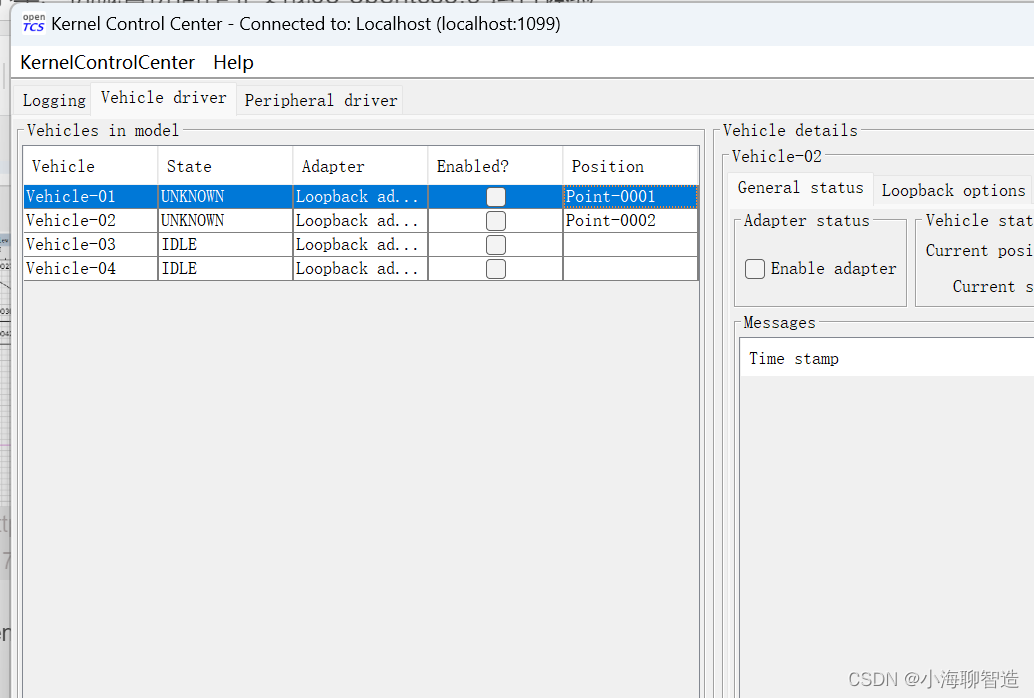
回到控制中心开启小车并配置位置
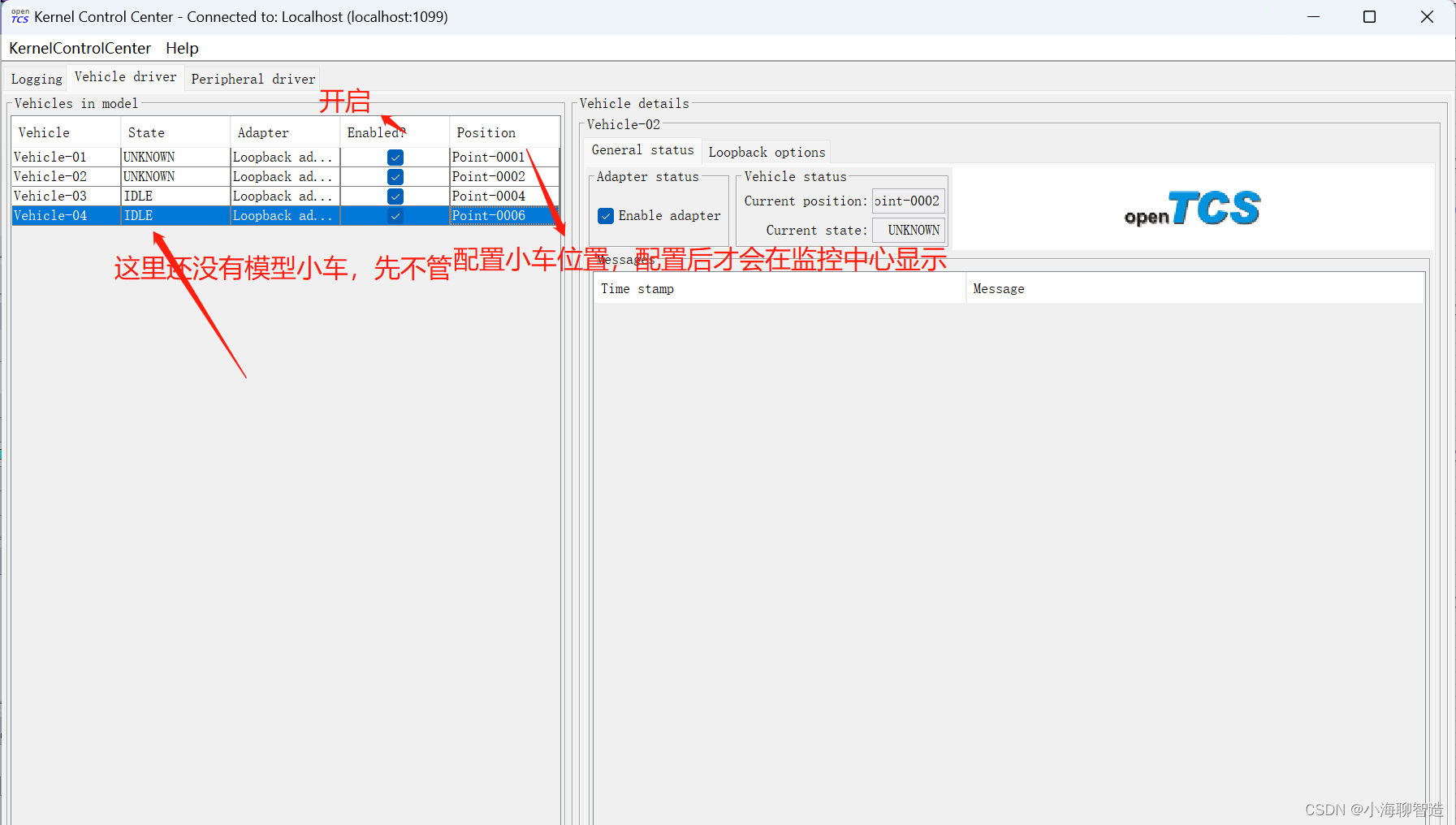
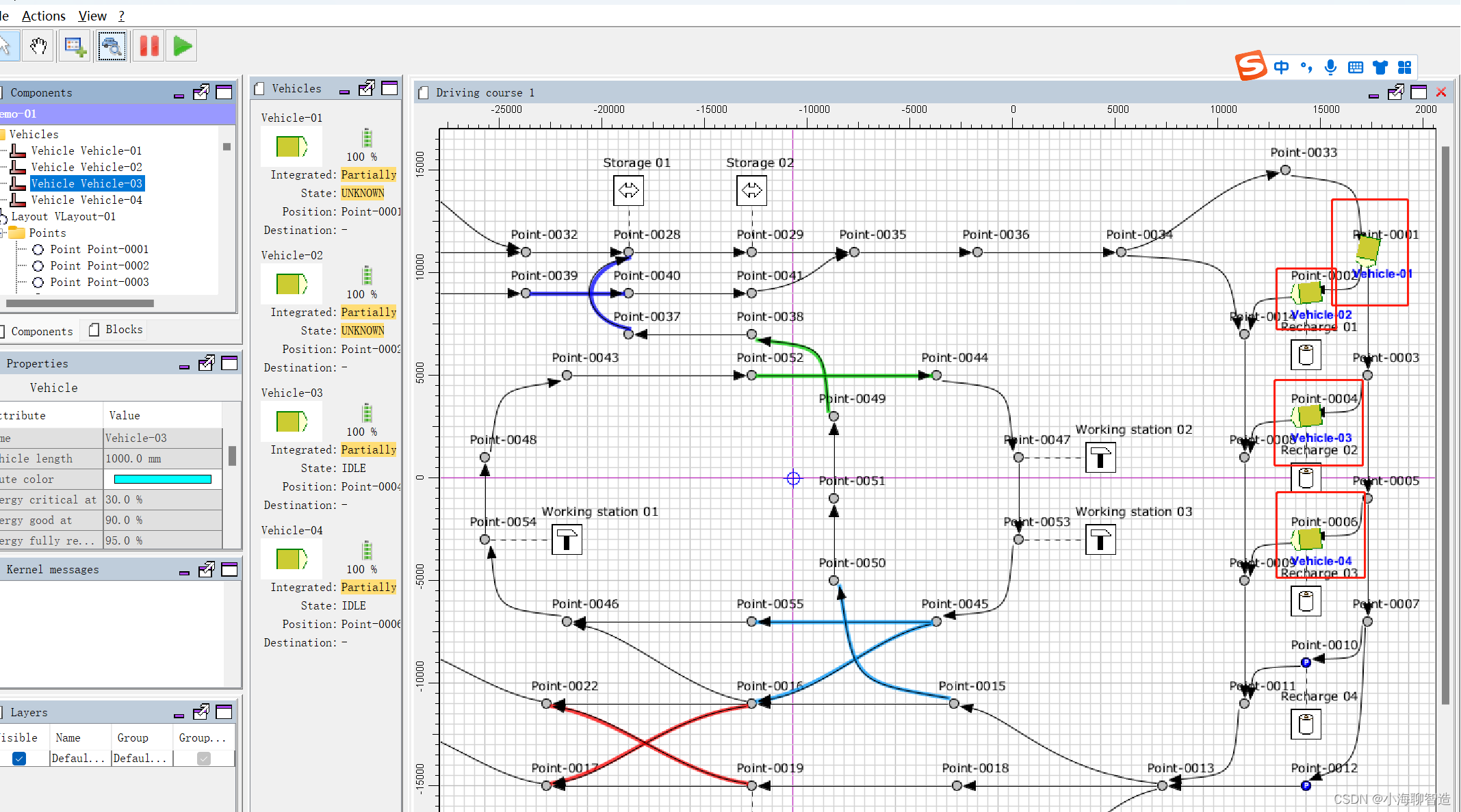
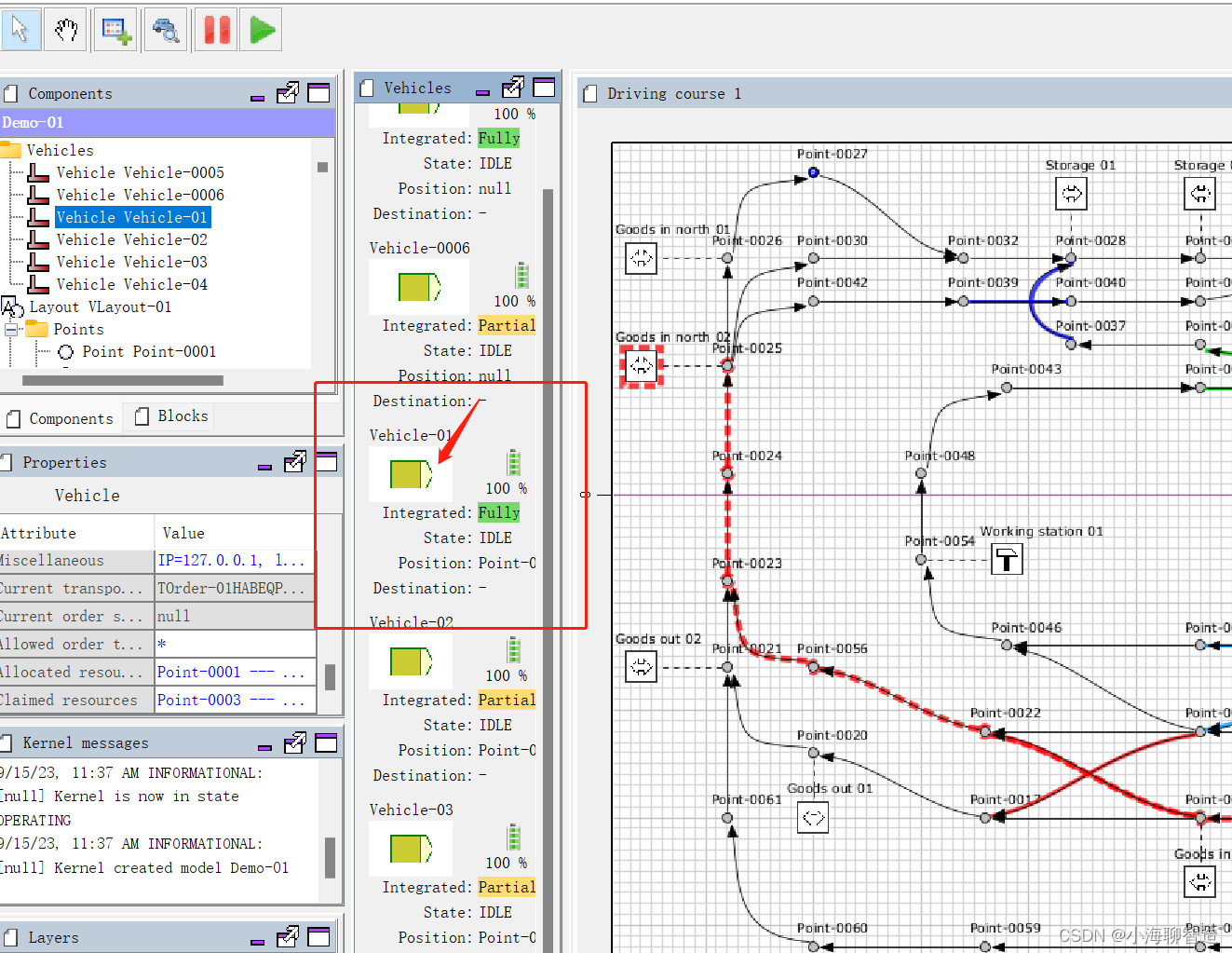
此时再回到监控中心 查看,可以看到图上已经多了4个小车
改变小车的状态为就绪,右键小车位置,按如下图操作
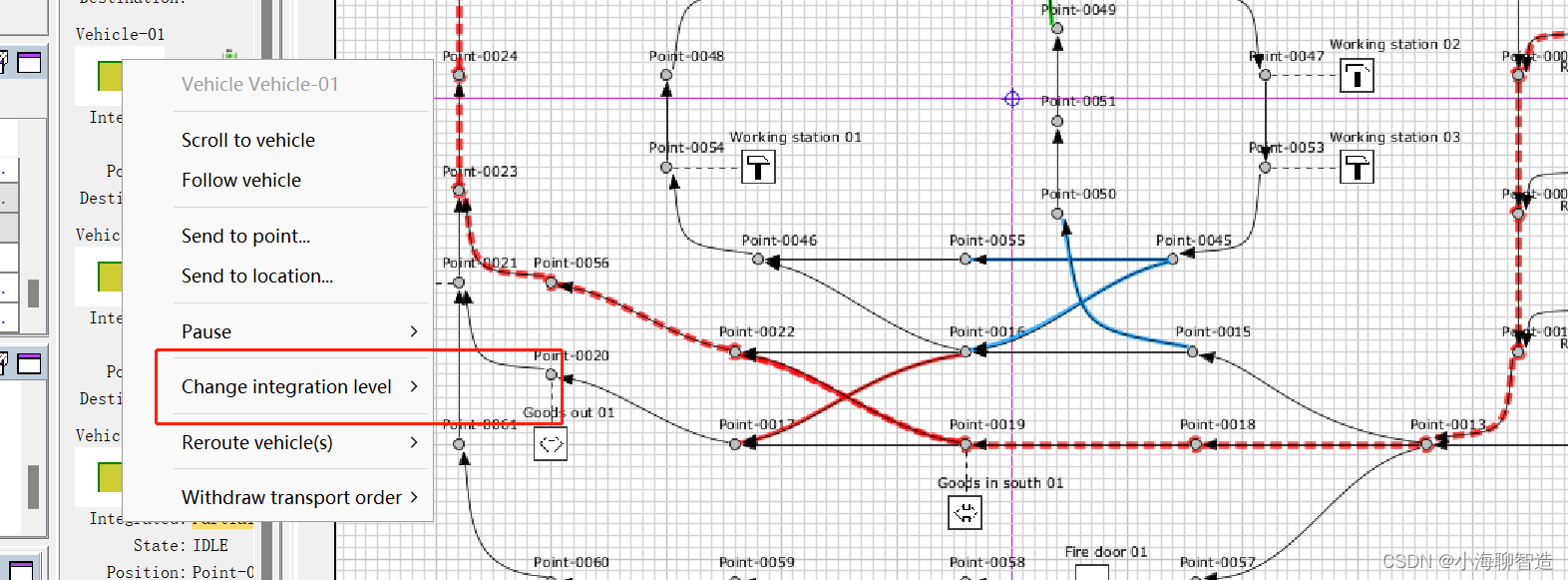
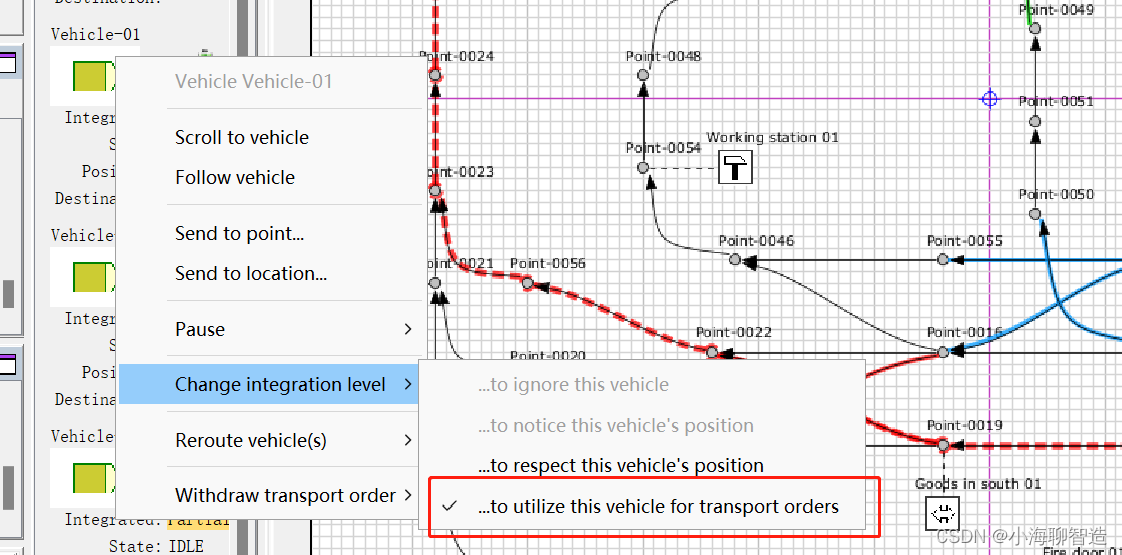
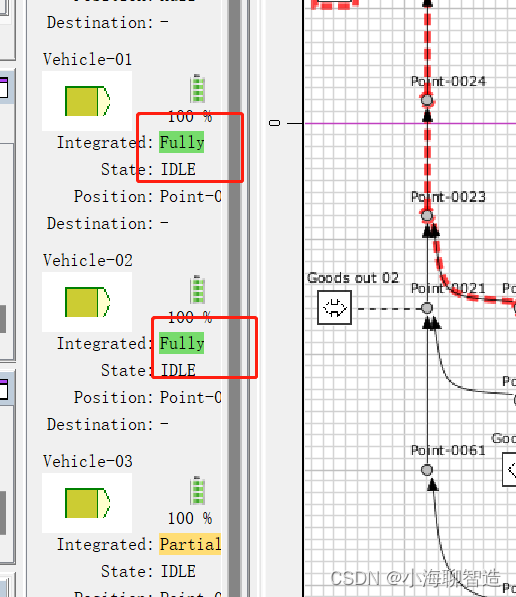
这个时候小车就会变成就绪状态,为绿色
接下来为小车 定制任务
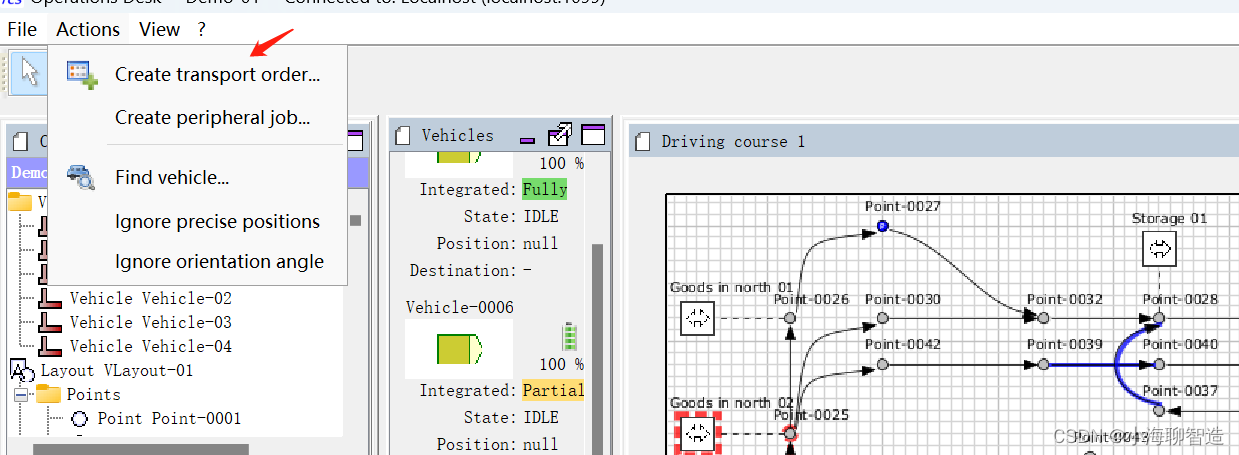
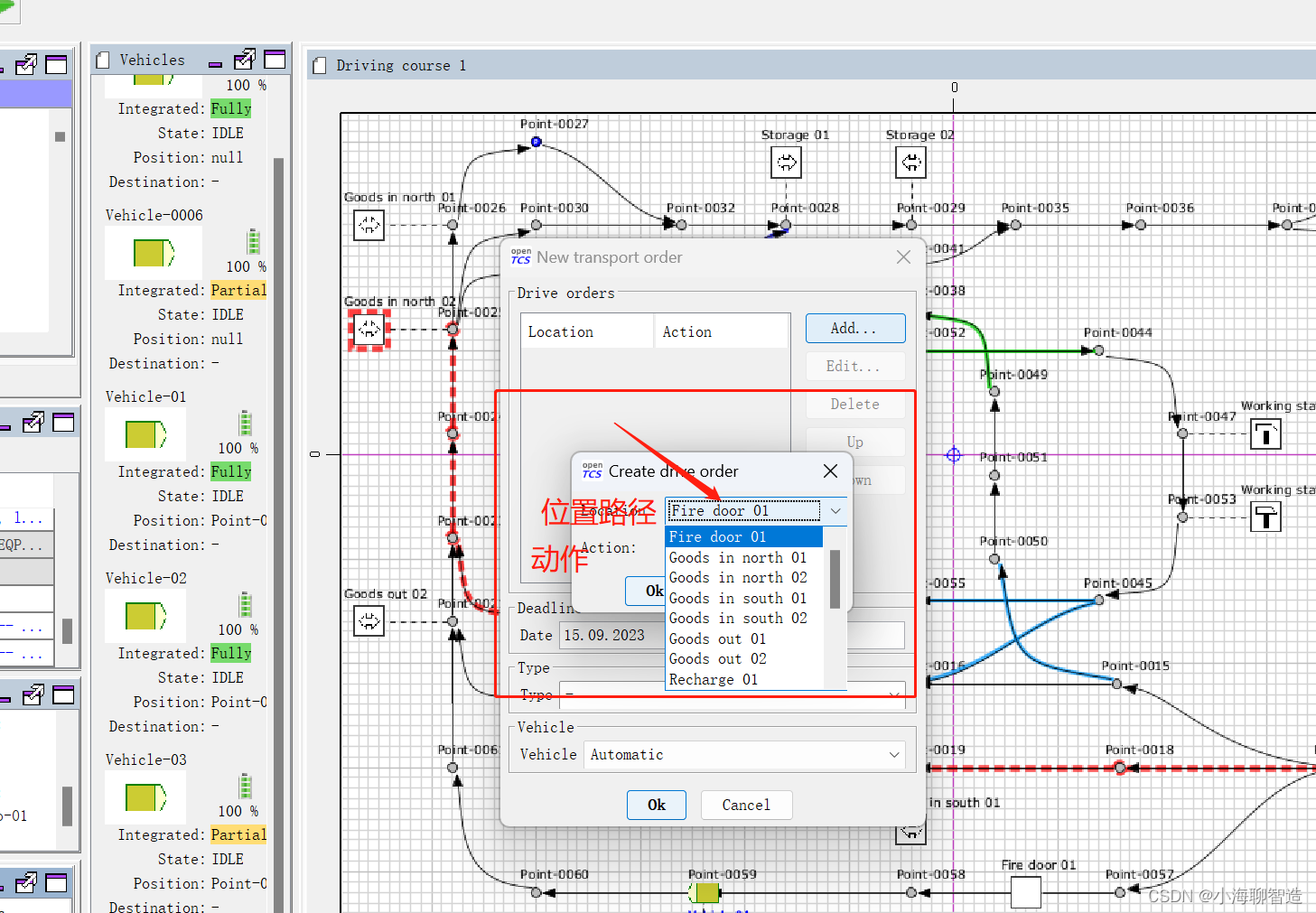
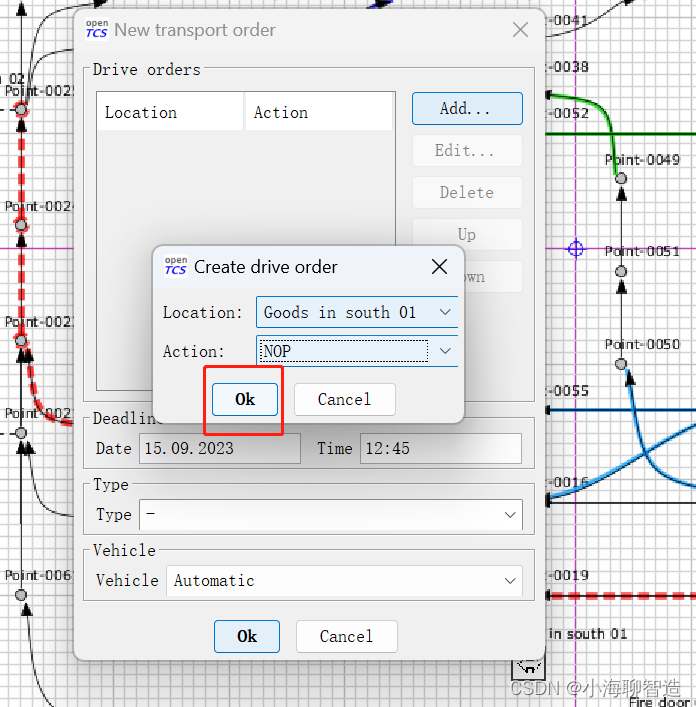
选择对应的小车执行任务
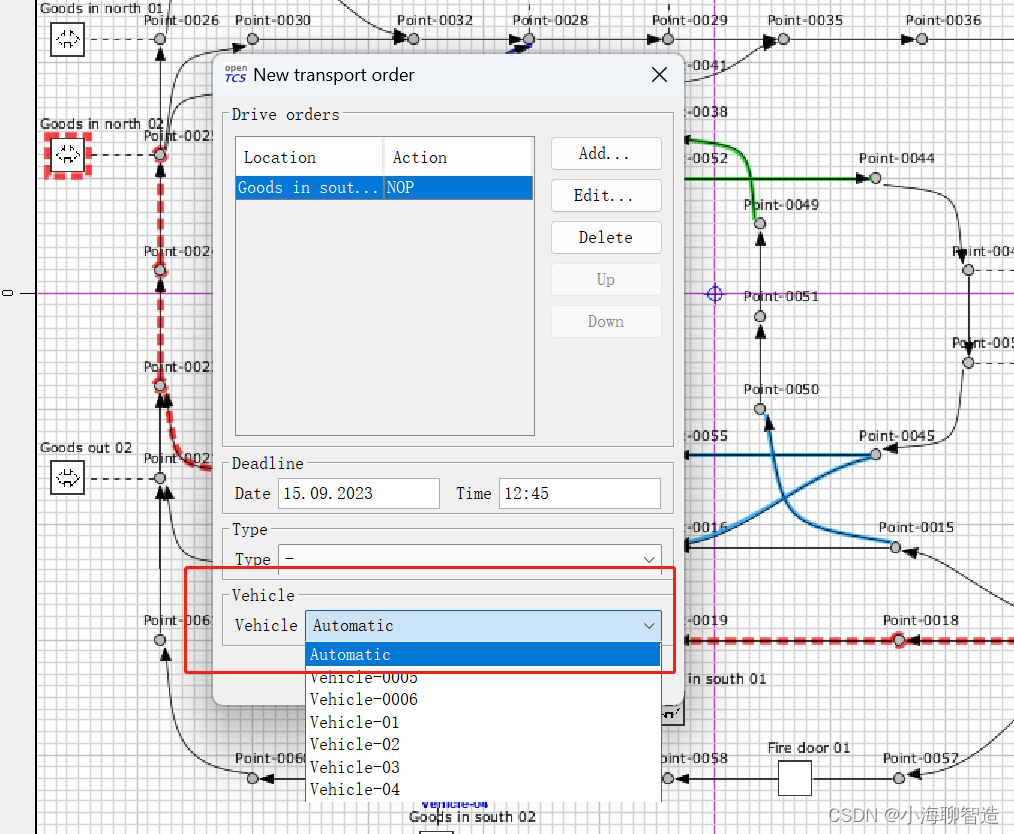
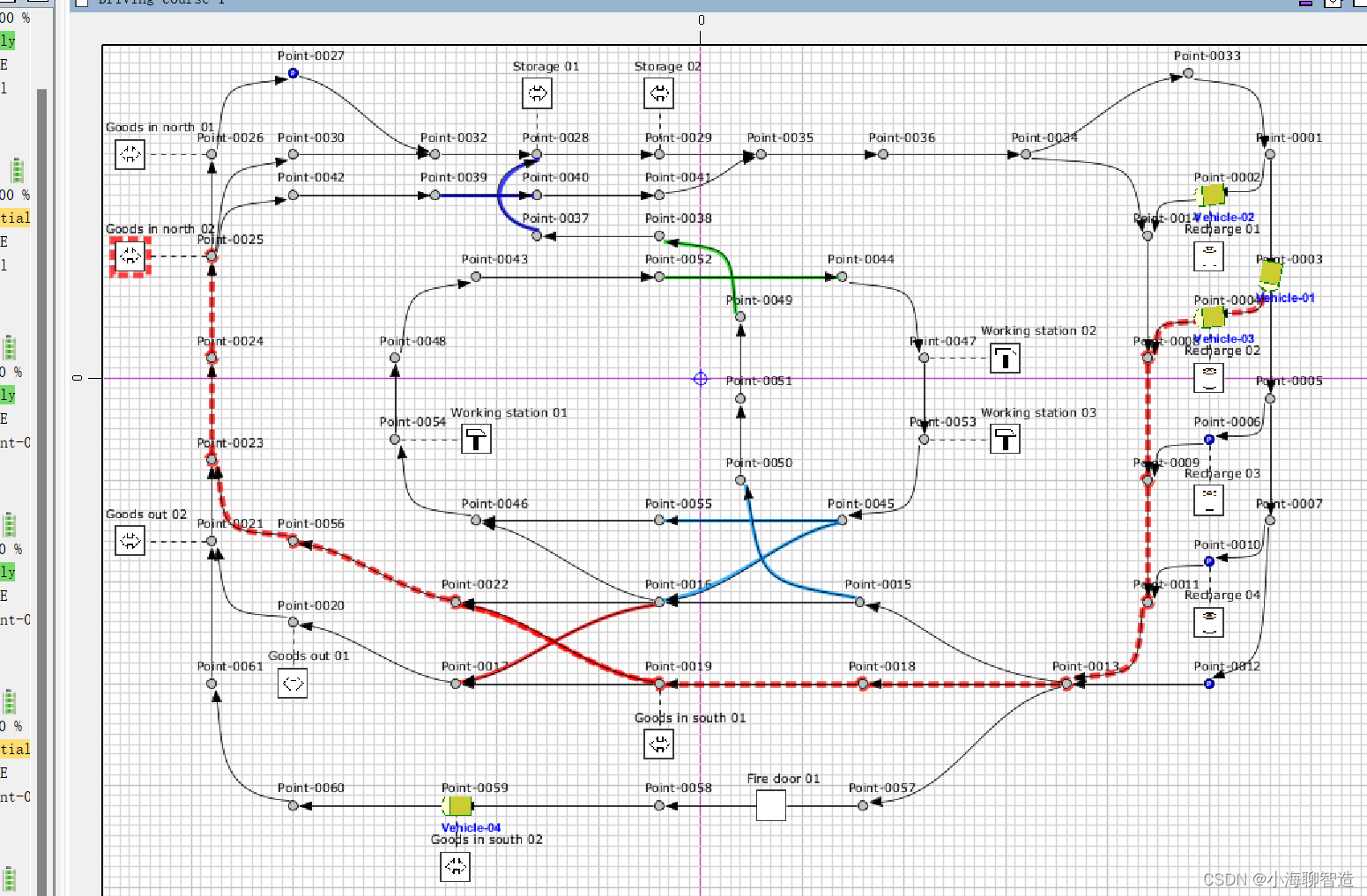
这个时候就会在地图上出现一个路线图



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











