










 本文介绍了如何在虚拟机中为Turtlebot3配置16GB内存和4核CPU,以及40GB磁盘。详细步骤包括启动仿真环境、使用ROS2launch文件、键盘控制、地图建图、保存和查看地图。
本文介绍了如何在虚拟机中为Turtlebot3配置16GB内存和4核CPU,以及40GB磁盘。详细步骤包括启动仿真环境、使用ROS2launch文件、键盘控制、地图建图、保存和查看地图。
安装看这里
https://blog.csdn.net/hai411741962/article/details/135619608?spm=1001.2014.3001.5502
虚拟机配置:
内存16g
cpu 4 核
磁盘40G,20G 不够
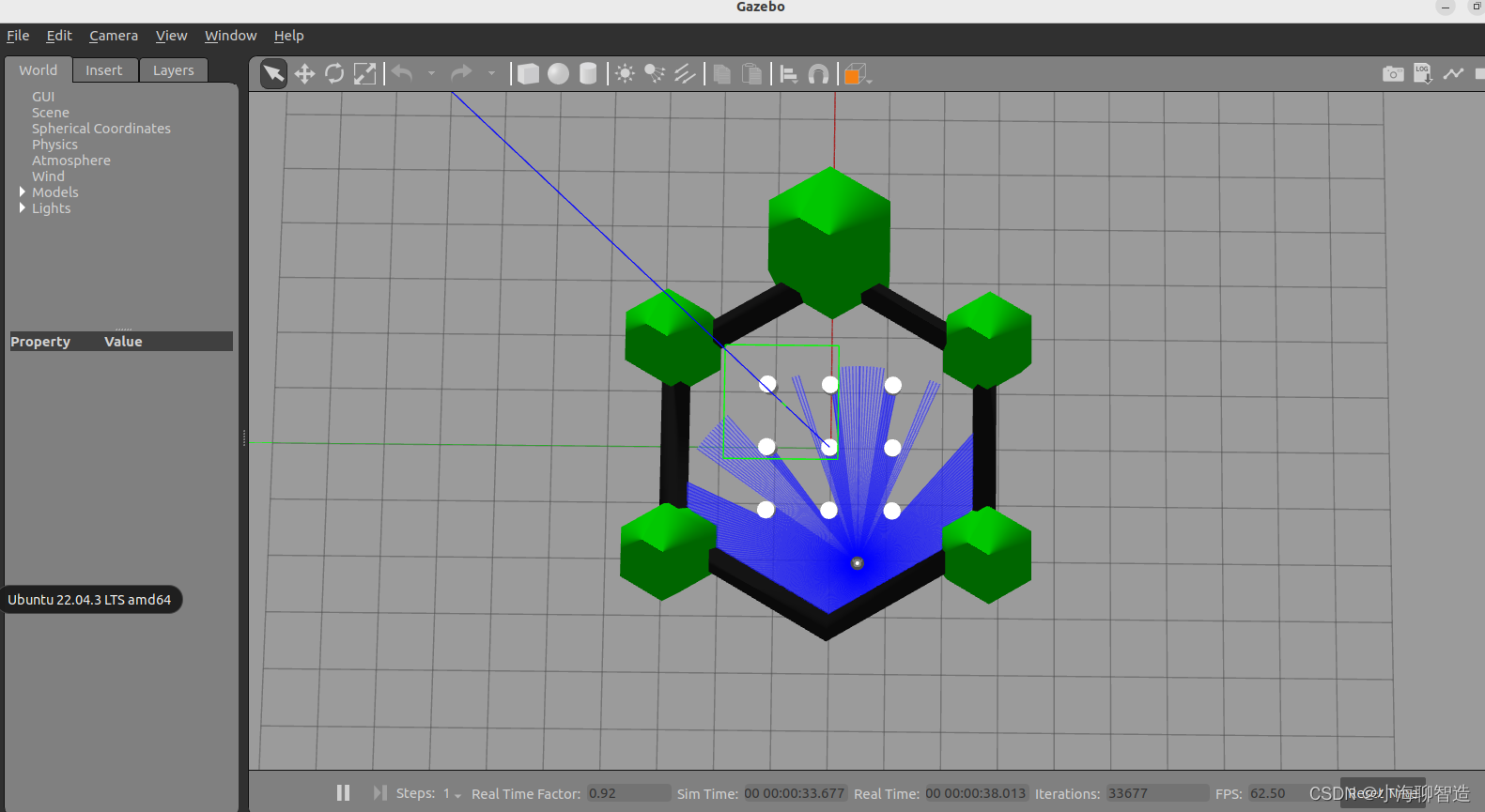
启动仿真
ros2 launch turtlebot3_gazebo turtlebot3_world.launch.py
启动成功如下
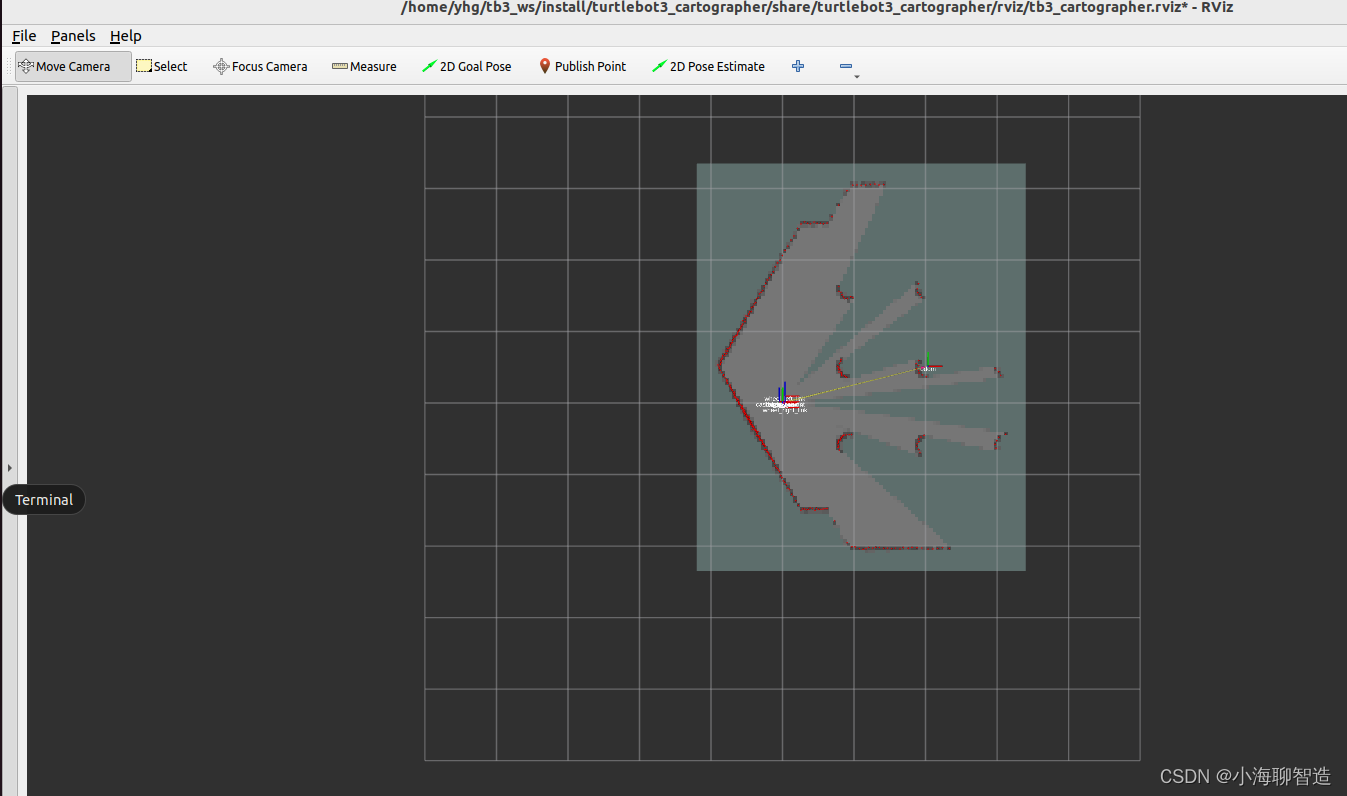
启动建图
重新开一个命令窗口:
ros2 launch turtlebot3_cartographer cartographer.launch.py use_sim_time:=True
启动成功后如下图
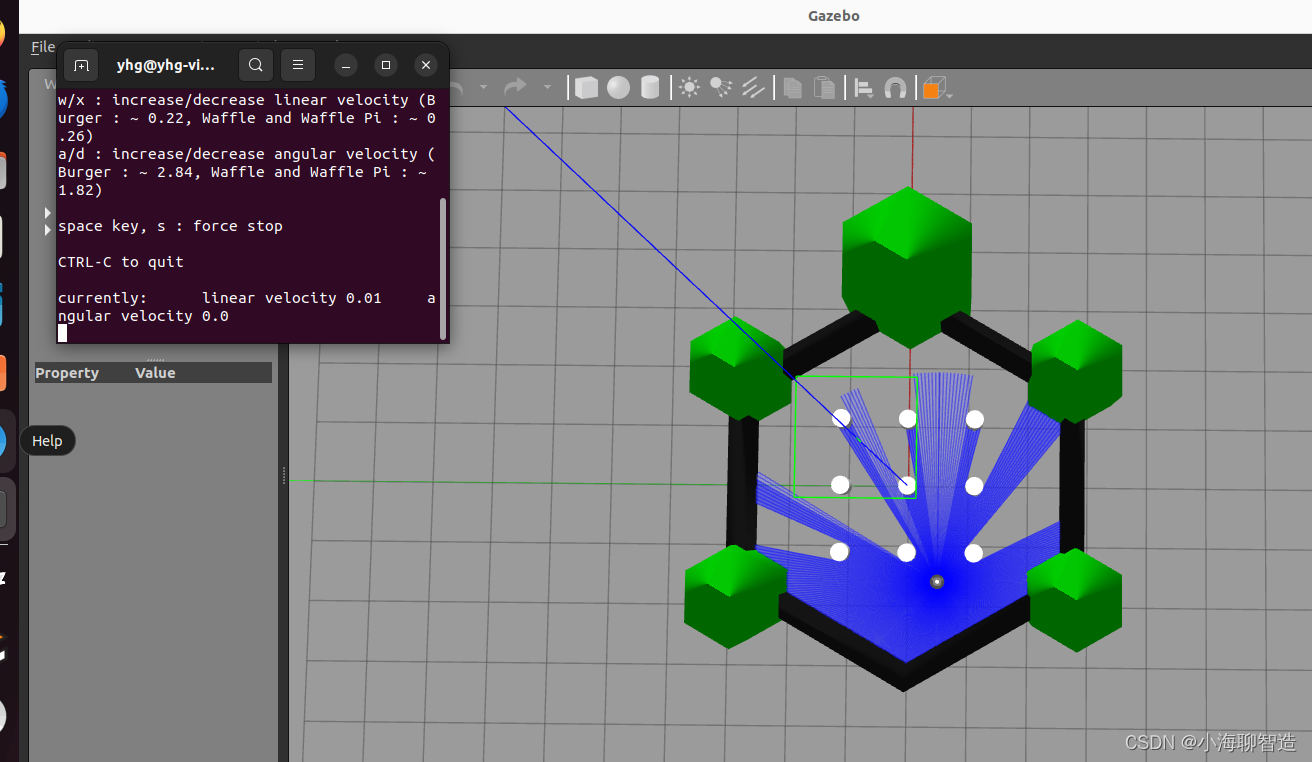
启动键盘
再开一个命令窗口输入
ros2 run turtlebot3_teleop teleop_keyboard
保持命令窗口在前,缩小操作键盘,可看到Gazebo 和 Rviz 的小车分别都在动了,也可以打开topic list 查看多了好些个topic
按下 w 就开始了
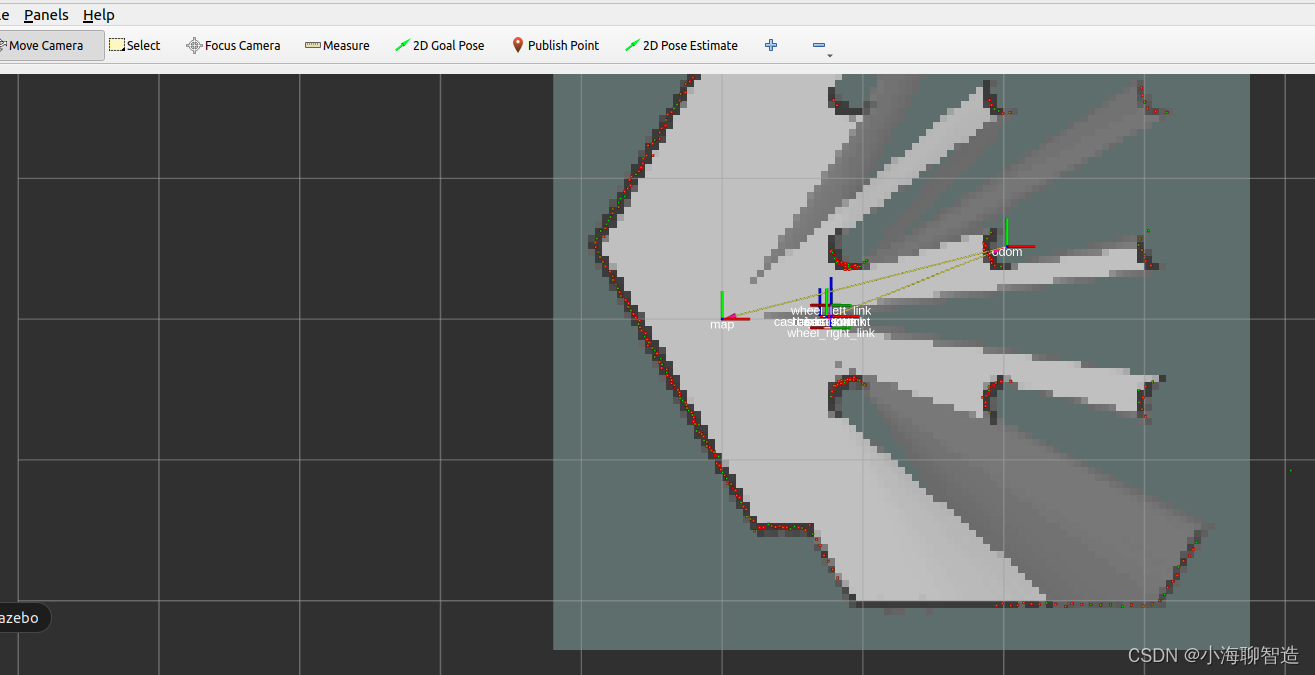
建图完成后,保存地图
保存地图
mkdir ~/map
ros2 run nav2_map_server map_saver_cli -f ~/map
地图保存在~下,名为map.yaml,map.pgm
查看地图
eog ~/map.pgm




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











