









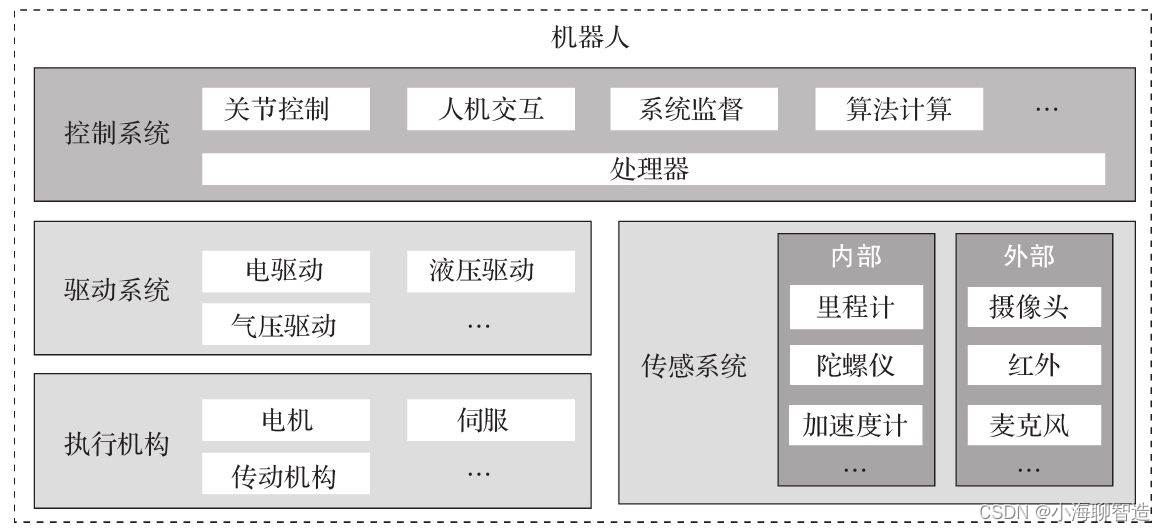
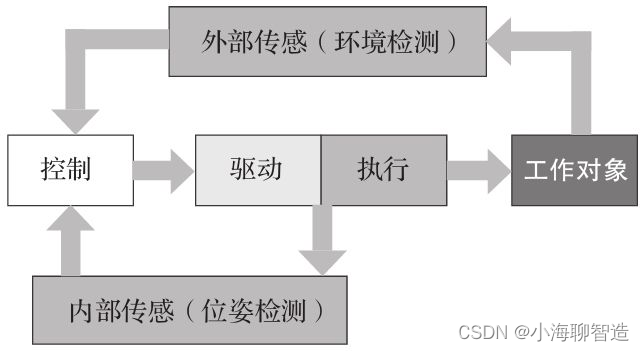
机器人是一个机电一体化的设备,从控制的角度来看,机器人系统可以分成四大部分,即执行机构、驱动系统、传感系统和控制系统.
各部分之间的控制关系如下图所示。
执行机构
执行机构是直接面向工作对象的机械装置,相当于人体的手和脚。根据不同的工作对象,适用的执行机构也各不相同。例如:常用的室内移动机器人一般采用直流电机作为移动的执行机构;而机械臂一般采用位置或力矩控制,需要使用伺服作为执行机构。
驱动系统
驱动系统负责驱动执行机构,将控制系统下达的命令转换成执行机构需要的信号,相当于人体的肌肉和筋络。不同的执行机构所使用的驱动系统也不相同,如直流电机采用较为简单的PWM驱动板,而伺服则需要专业的伺服驱动器,工业上也常用气压、液压驱动执行机构。
传感系统
传感系统主要完成信号的输入和反馈,包括内部传感系统和外部传感系统,相当于人体的感官和神经。内部传感系统包括常用的里程计、陀螺仪等,可以通过自身信号反馈检测位姿状态;外部传感系统包括摄像头、红外、声呐等,可以检测机器人所处的外部环境信息。
控制系统
控制系统实现任务及信息的处理,输出控制命令信号,类似于人的大脑。机器人的控制系统需要基于处理器实现,一般常用的有ARM、x86等架构的处理器,其性能不同,可以根据机
器人的应用选择。在处理器之上,控制系统需要完成机器人的算法处理、关节控制、人机交互等丰富的功能。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











