







 本文介绍了在ROS-Kinetic环境下配置UR5工作空间及实现通信的步骤。包括添加环境变量、创建工作空间、下载驱动、修改文件、编译等操作,还说明了在gazebo和rviz中模拟控制UR5的方法,以及与实体机器人通信的配置,确保rviz与实际机器人姿态一致以实现控制。
本文介绍了在ROS-Kinetic环境下配置UR5工作空间及实现通信的步骤。包括添加环境变量、创建工作空间、下载驱动、修改文件、编译等操作,还说明了在gazebo和rviz中模拟控制UR5的方法,以及与实体机器人通信的配置,确保rviz与实际机器人姿态一致以实现控制。
参考网址:https://blog.csdn.net/GJXS2017/article/details/80565196
https://blog.csdn.net/tiancailx/article/details/78622536
1,首先添加source /opt/ros/kinetic/setup.bash到.bashrc工作目录,因为You will need to run this command on every new shell you open to have access to the ROS commands,(第一次创建工作空间需要操作)。可以通过终端输入gedit .bashrc 查看。
2,echo $ROS_PACKAGE_PATH
(当有其它工作目录时,显示当前工作目录)
3,创建工作空间及下载包
mkdir -p ~/universal_robot/src
cd ~/universal_robot/src
git clone https://github.com/ros-industrial/universal_robot.git
git clone https://github.com/ros-industrial/industrial_core.git
4,下载ur_modern_driver驱动
cd universal_robot
git clone https://github.com/beta-robots/ur_modern_driver.git
5,修改驱动文件
gedit ~/universal_robot/src/universal_robot/ur_modern_driver/config/ur5_controllers.yaml
在文件下添加
controller_list:
- name: /vel_based_pos_traj_controller #or /pos_based_pos_traj_controller
action_ns: follow_joint_trajectory
type: FollowJointTrajectory
default: true
joints:
- shoulder_pan_joint
- shoulder_lift_joint
- elbow_joint
- wrist_1_joint
- wrist_2_joint
- wrist_3_joint
6,编译
cd ~/universal_robot
catkin_make
7,指定新建的工作目录
修改.bashrc文件在最后添加
source /home/comeon-harry/universal_robot/devel/setup.bash
在终端下输入
. /home/comeon-harry/universal_robot/devel/setup.bash (对应自己的文件名)(.后带空格)
输入`echo $ROS_PACKAGE_PATH`,发现工作目录改过来
8,测试
要在gazebo和rviz模拟UR5并在模拟中对其进行控制,请首先安装必要的软件包:
sudo apt-get install ros-kinetic-gazebo-ros-pkgs ros-kinetic-gazebo-ros-control
sudo apt-get install ros-kinetic-ur-gazebo ros-kinetic-ur5-moveit-config ros-kinetic-ur-kinematics
打开终端,启动
roslaunch ur_gazebo ur5.launch
打开新终端
roslaunch ur5_moveit_config ur5_moveit_planning_execution.launch sim:=true
再打开一个新终端
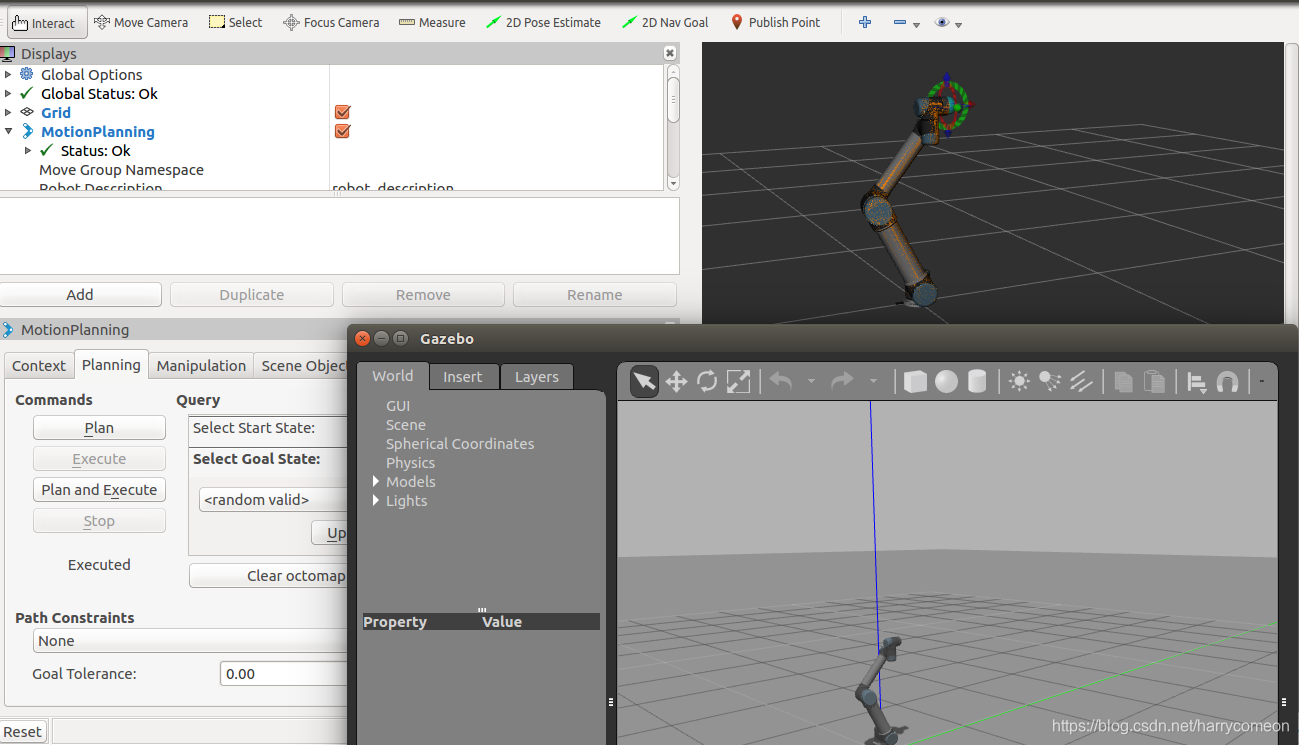
roslaunch ur5_moveit_config moveit_rviz.launch config:=true
起始位置时Rviz界面和Gazebo界面下的UR5形态一致,可以在Rviz界面下plan和execute发现可以规划,和运行,并且Gazebo下的机械手一起运动,说明配置成功了。
9,与实体机器人通信
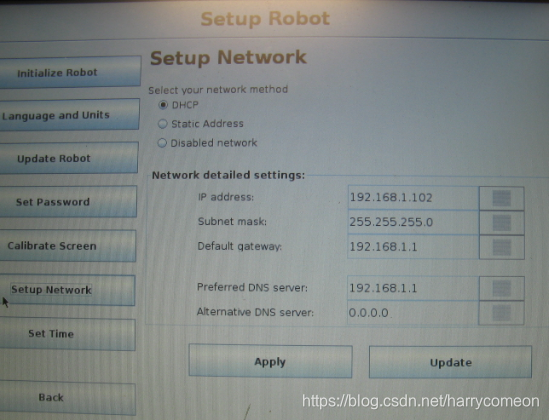
首先设置示教器ip地址:ping通,启动rviz后与实际的UR5形态一致
ping IP_OF_THE_ROBOT
要调出真实的机器人,请在用实际硬件地址替换IP_OF_THE_ROBOT后运行以下命令:
roslaunch ur_modern_driver ur5_bringup.launch robot_ip:=IP_OF_THE_ROBOT [reverse_port:=REVERSE_PORT]
eg:IP_OF_THE_ROBOT应该为192.168.1.1,这里是电脑与机械手创建通信配置的。并且这里的ur_modern_driver路径下ur5_bringup针对于UR 3.0及更高版本。如果您使用的是UR 3.0及更高版本,需要安装ur_modern_driver包。
为了设置MoveIt!允许运动计划运行的节点
roslaunch ur5_moveit_config ur5_moveit_planning_execution.launch
用于启动包含MoveIt!的配置的RViz!运动规划插件运行:
roslaunch ur5_moveit_config moveit_rviz.launch config:=true
连通后,rviz中的UR5姿态和实际一致,就可以在rviz规划路径并控制UR5。

















 6万+
6万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









