



作为已经被deepmind收购的仿真软件来说,现在主要包括需要license版本和无需license版本的mujoco两种了,这里主要对安装这两种mujoco及其对应的mujoco-py进行一个介绍
mujoco210
这个版本就比较常见了,我们这里使用的python3.8版本,然后通过pip安装对应的mujoco_py
下载mujoco
这个版本的mujoco已经不需要license文件了,直接去mujoco官网进行下载
https://github.com/google-deepmind/mujoco
进去Releases中选择对应的版本
可以看到最新的3.3.2版本的,我们这里选择mujoco210-linux-x86_64.tar.gz
,这也是最早开源的mujoco版本了.
配置环境
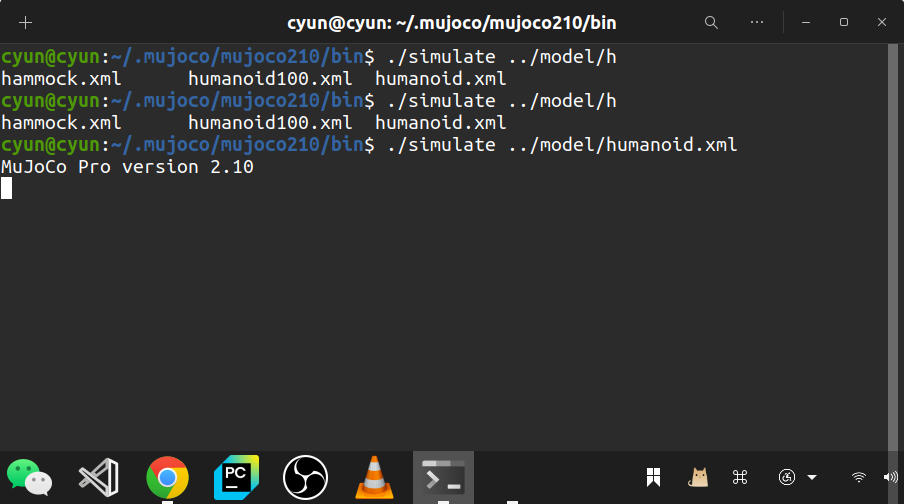
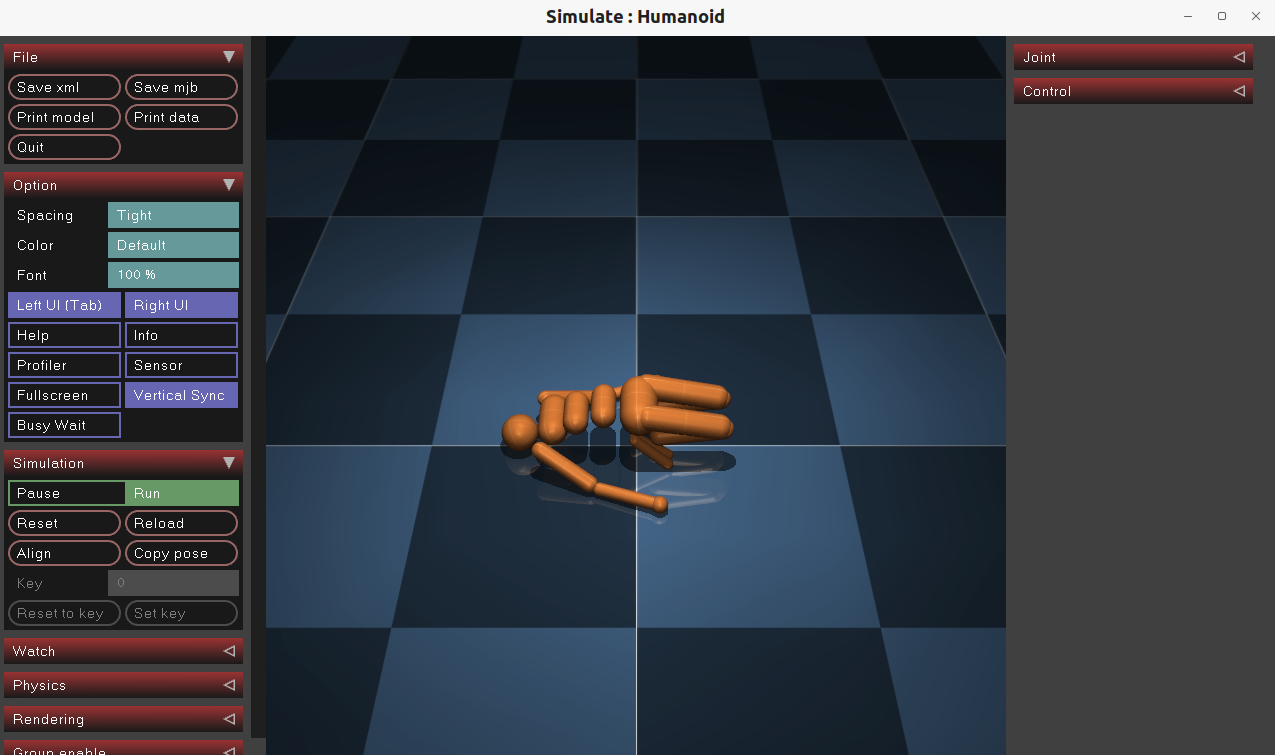
仿真环境可以先进行测试,我们进入mujoco文件夹中运行
./simulate …/model/humanoid.xml
修改环境变量
我们新建一个.mujoco文件夹,然后把仿真环境放入其中
很多时候使用mujoco都是需要一个固定的环境变量支持的,这里需要往.bashrc中添加,注意修改为自己的用户名:
gedit ~/.bashrc
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/home/cyun/.mujoco/mujoco210/bin
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/usr/lib/nvidia
最后我们安装mujoco_py
mujoco_py安装
首先需要安装一些依赖项
sudo apt-get install libglew-dev glew-utils
sudo apt install libosmesa6-dev libgl1-mesa-glx libglfw3
(推荐建立一个虚拟conda环境)接着就可以安装mujoco_py了,注意版本需要稍微考虑一下,所以使用了
pip3 install -U 'mujoco-py<2.2,>=2.1'
注意cython的版本不能太高了:
pip install cython==0.29.24
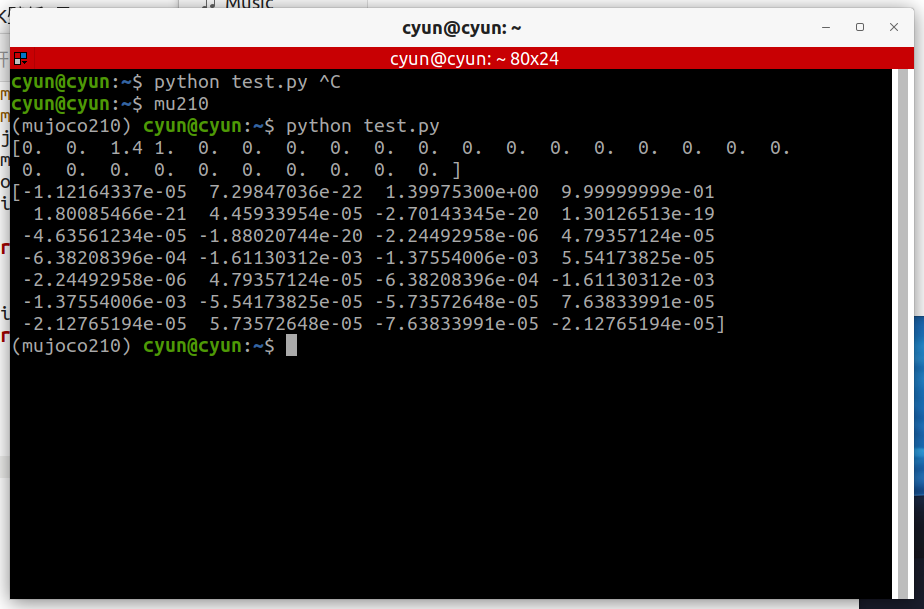
测试,测试时我们主要需要的是import mujoco_py,这个过程能import那就基本没有问题了:
只要能够import了基本就问题不带了
import mujoco_py
import os
mj_path = mujoco_py.utils.discover_mujoco()
xml_path = os.path.join(mj_path, 'model', 'humanoid.xml')
model = mujoco_py.load_model_from_path(xml_path)
sim = mujoco_py.MjSim(model)
print(sim.data.qpos)
# [0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0.]
sim.step()
print(sim.data.qpos)
# [-2.09531783e-19 2.72130735e-05 6.14480786e-22 -3.45474715e-06
# 7.42993721e-06 -1.40711141e-04 -3.04253586e-04 -2.07559344e-04
# 8.50646247e-05 -3.45474715e-06 7.42993721e-06 -1.40711141e-04
# -3.04253586e-04 -2.07559344e-04 -8.50646247e-05 1.11317030e-04
# -7.03465386e-05 -2.22862221e-05 -1.11317030e-04 7.03465386e-05
# -2.22862221e-05]
mujoco131
这个版本是还需要license的版本,并且到2031过期,安装mujoco131与之前类似,只是需要去原mujoco官网进行下载了
https://www.roboti.us/download.html
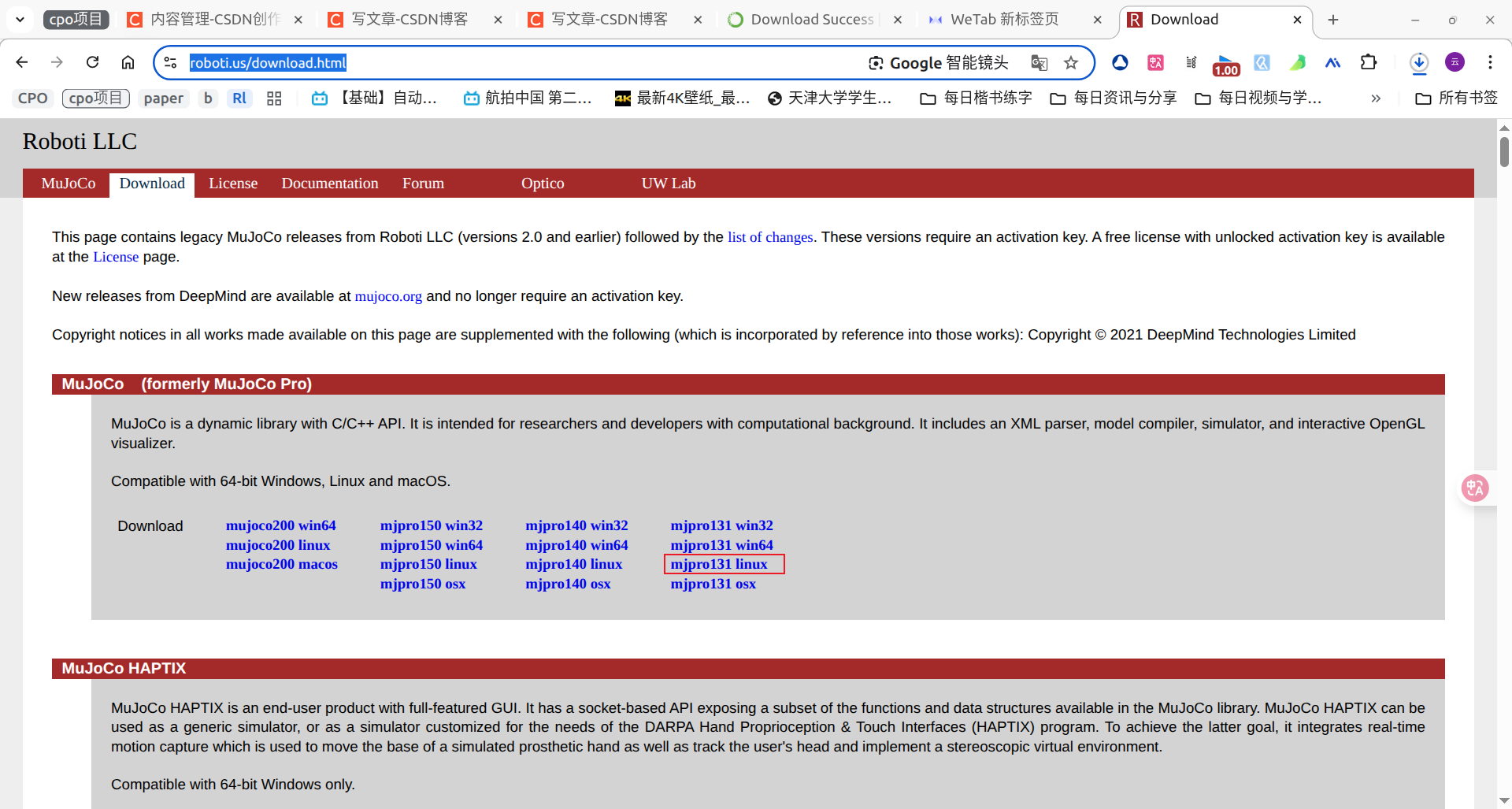
处理也是一样的处理,去.mujoco中进行解压,然后往bashrc中添加对应的内容.
当时还叫mjpro版本,并不开源.
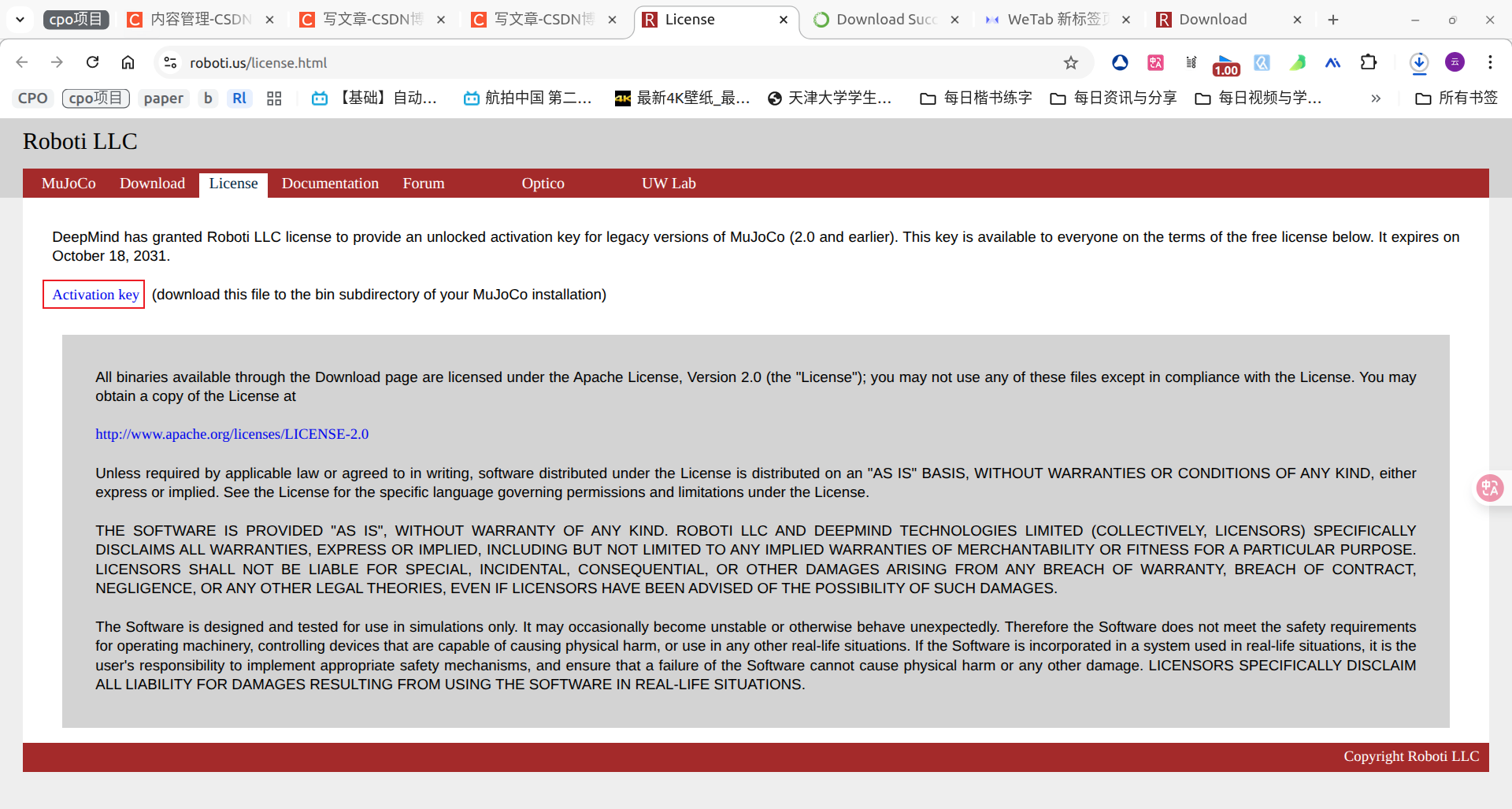
获取license
https://www.roboti.us/license.html,到2031年之前都还能再用
gedit ~/.bashrc
export MUJOCO_PY_MJKEY_PATH=/home/cyun/.mujoco/mjkey.txt
export MUJOCO_PY_MJPRO_PATH=/home/cyun/.mujoco/mjpro131
安装mujoco_py
安装前的依赖同上,然后需要的python版本是py3.5,然后再安装对应的mujoco_py版本
待完善2025.5.26
这是mujoco-py的官网库
https://github.com/openai/mujoco-py?tab=readme-ov-file



















 2779
2779

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











