






ABB机器人有时因现场工况,需要以一定的角度倾斜或者倒置安装,此时如果参数设置不正确,会导致有些功能无法使用,或者基坐标不是想要的方向,故需要进行以下设置:
一、配置机器人基坐标
RobotWare6.X系统可以直接在示教器上设置,但是RobotWare7.X版本使用Omnicore控制柜系统时,因为在示教器上无法设置机器人参数,故需要借助RobotStudio进行设置:
1.打开配置-Motion-Robot
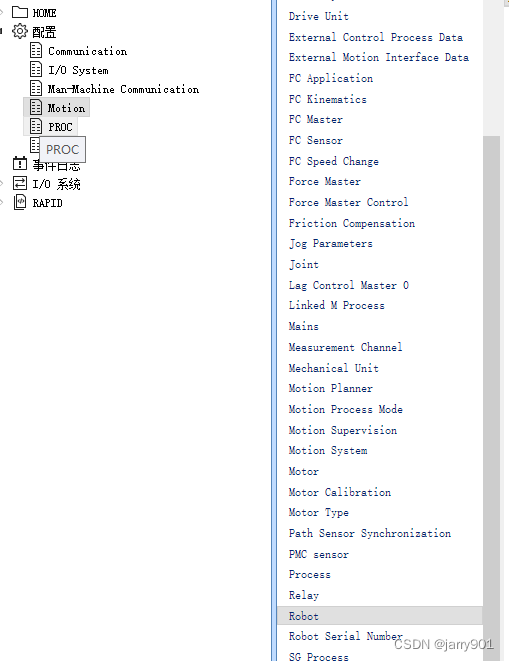
2.双击机器人打开“实例编辑器”
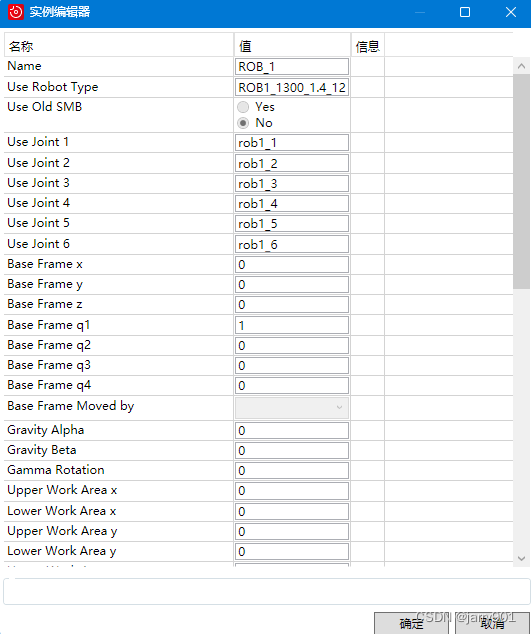
其中,Base Frame x/Base Frame y/Base Frame z/Base Frame q1/Base Frame q2/Base Frame q3/Base Frame q4是机器人基坐标框架的参数,根据机器人实际安装的方向进行设置,这里设置的目的,主要是让编程人员在示教点位的时候,可以根据符合右手定则的方向进行移动和示教,如果你觉得操作足够熟练,并且不会因为不习惯而影响调试进度,可以不管
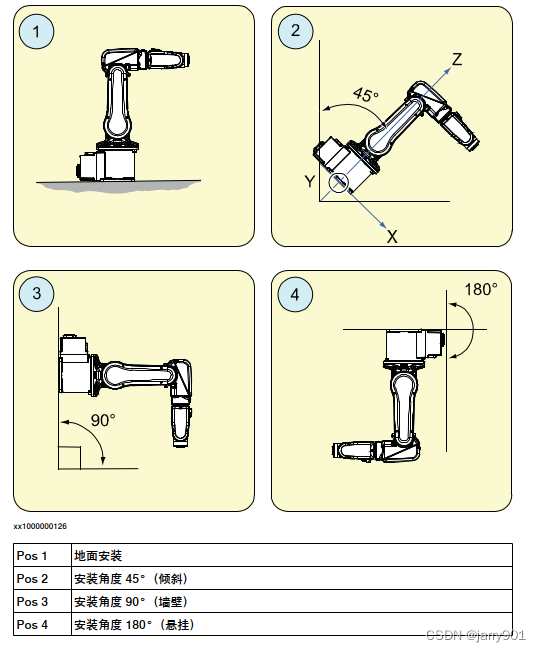
这里就根据实际安装的角度,算出基坐标相对于世界坐标的偏移值和选装角度即可。一般可参考下图定义:

二、配置机器人旋转角度
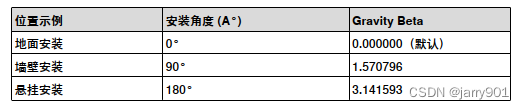
1.Gravity Beta
若机器人安装是绕机器人Y轴旋转的,必须定义该值,参数路径:配置-Motion-Robot,双击进入“实例编辑器”即可修改。
2.Gravity Alpha
若机器人安装是绕机器人X轴旋转的,必须定义该值,参数路径:配置-Motion-Robot,双击进入“实例编辑器”即可修改。
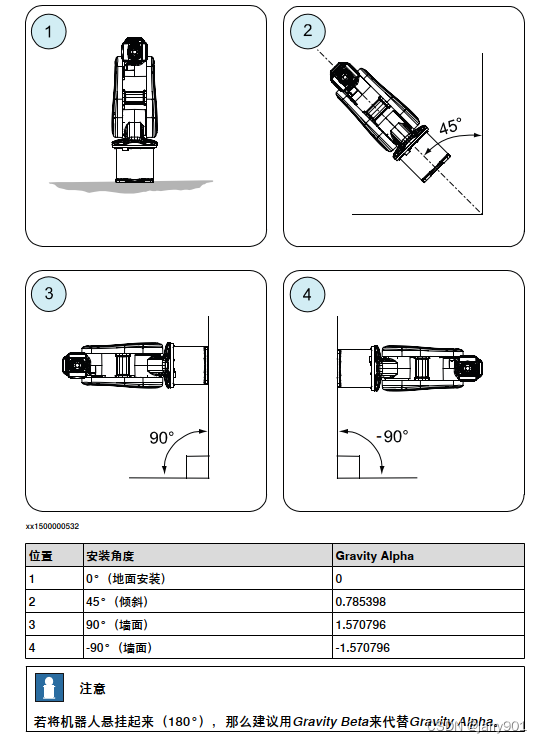
Gravity Alpha和Gravity Beta,指定的是机器人的安装角度,是以弧度表示的,特殊角度安装,可以按照以下公式计算:
Gravity Beta = A° x 3.141593/180 = B radians,其中A是以度为单位的安装角度,B是以弧度为单位的安装角度。
如果安装角度没有正确定义,可能会导致以下故障:
1.机械结构过载,即经常出现碰撞报警或载荷超限报警
2.路径精度、性能收影响
3.某些功能无法正常工作,例如理性程序Load Identification无法调用,选项Collision detection功能无法使用。















 5389
5389

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









