









 本文介绍了在ROS2中使用MoveIt控制舵机机械手的系统调试与运行过程。通过虚拟机连接串口到Ubuntu22.04,解决CH340串口驱动问题,并利用MoveIt和Rviz构建机械手控制环境。文章详细阐述了Qt程序与下位机的串口通信,以及如何发布Action对接MoveIt并发送点位信息到下位机。最后,作者提供了项目代码和运行效果视频,并指出系统存在的卡顿问题源于机械结构和路径插补。
本文介绍了在ROS2中使用MoveIt控制舵机机械手的系统调试与运行过程。通过虚拟机连接串口到Ubuntu22.04,解决CH340串口驱动问题,并利用MoveIt和Rviz构建机械手控制环境。文章详细阐述了Qt程序与下位机的串口通信,以及如何发布Action对接MoveIt并发送点位信息到下位机。最后,作者提供了项目代码和运行效果视频,并指出系统存在的卡顿问题源于机械结构和路径插补。
1.前言
在上一篇【ROS2中用MoveIt2控制自己的舵机机械手(4)】,我们已经实现了上下位机的通讯。由于目前使用的是舵机,MCU(stm32)是无法从舵机那里读取到当前的角度的,因此下位机发给上位机的协议暂时没必要实现,暂时只用printf来调试就够了。
这一篇,我们来实现整个系统的调试与运行。
2.串口连接至虚拟机
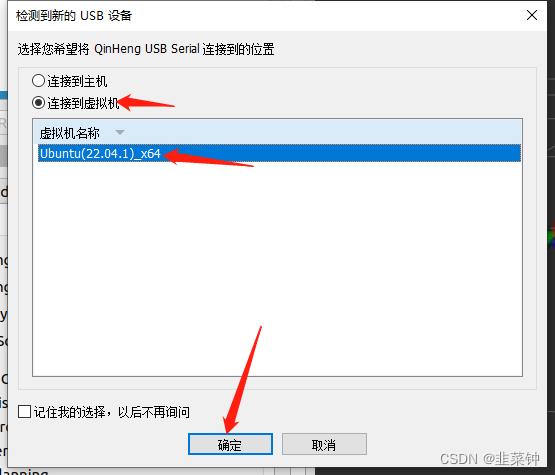
我这边用的是虚拟机VMware里面运行了个Ubuntu22.04,因此串口需要连接到虚拟机里面。我用的是usb转串口(CH340芯片),在虚拟机开启的情况下,将串口插入电脑时,虚拟机会提示是否接入到虚拟机,选择接入虚拟机即可。
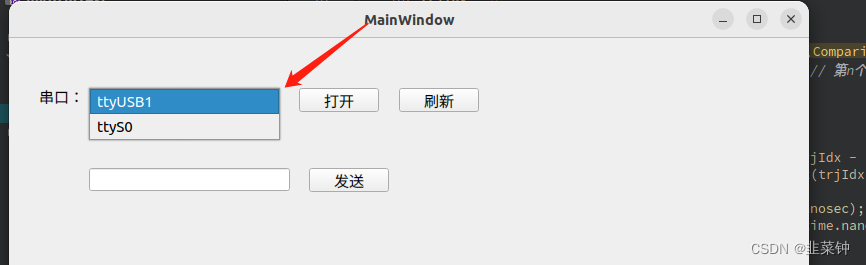
但是接入后,假如打开我们自己写的Qt程序来试图打开串口,会发现枚举不到我们的串口,此时需要按照这个来进行操作:【Ubuntu22.04 CH340系列串口驱动(没有ttyUSB)问题解决方案】
sudo apt remove brltty
此时重新拔插就可以枚举到这个ttyUSB了。
但是此时假如选择打开这个串口的话,会报[permission denied]的错误,无法打开。这个问题可以参考这里解决:【ubuntu 打开串口时permission denied】
3.MoveIt、Rviz、机器人状态节点
参考 【在ROS2中,通过MoveIt2控制Gazebo中的自定义机械手】、【ROS2中用MoveIt2控制自己的舵机机械手(1)】,利用我们从SolidWorks导出的模型构建基本的MoveIt环境。
4.机器人节点
这次我们的机器人节点是用Qt调用ROS库编写的,详情请参考【ROS2中用MoveIt2控制自己的舵机机械手(1)】,【ROS2中用MoveIt2控制自己的舵机机械手(4)】.
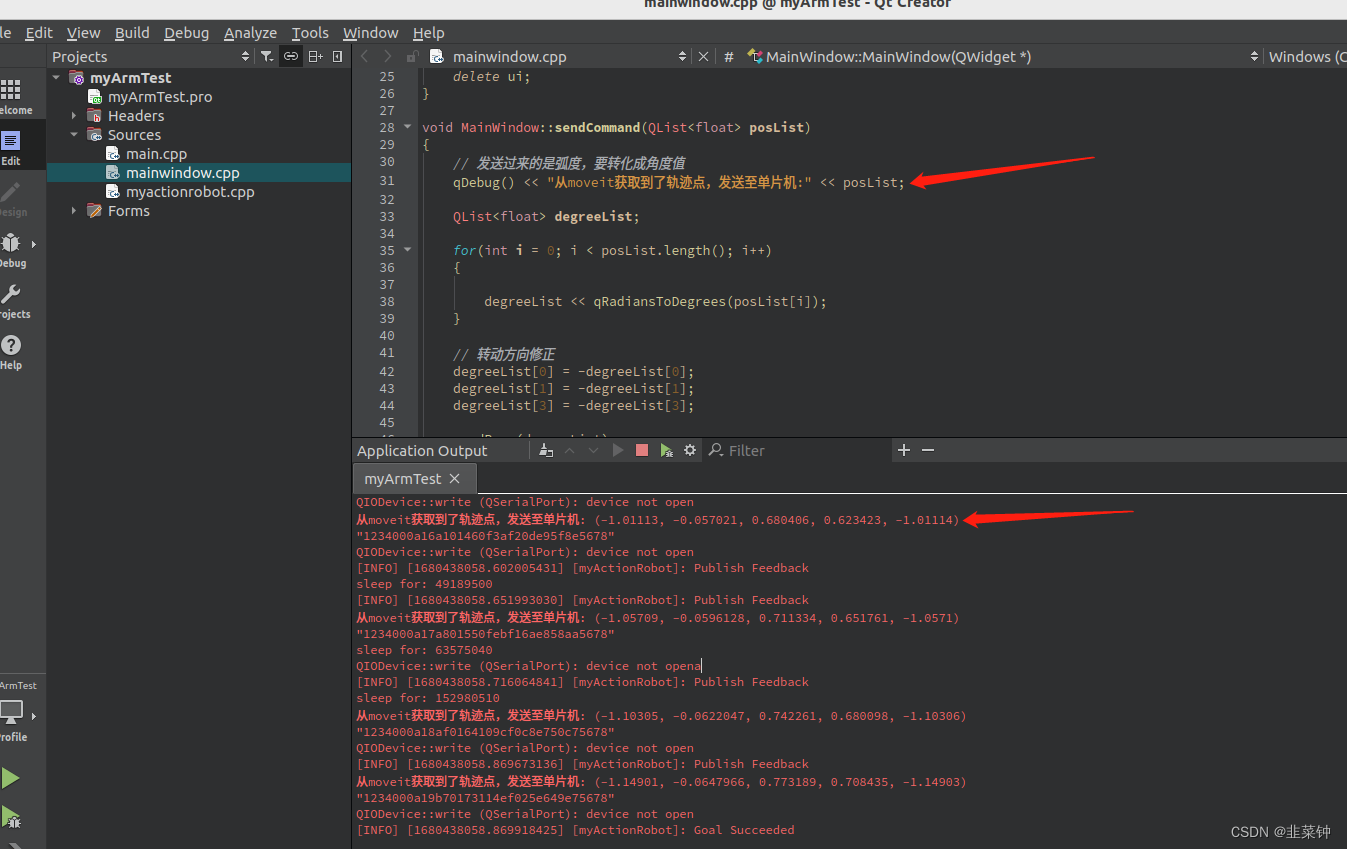
我们创建了一个类MyActionRobot ,里面会发布Action用于对接Moveit,同时会把接收到的MoveIt发送过来的路径点位信息发射出去
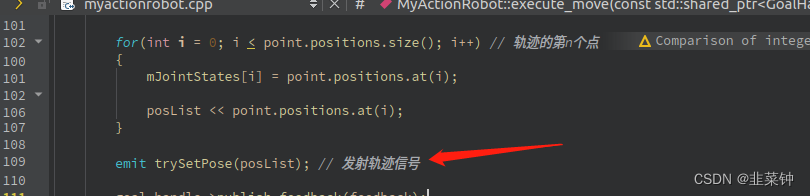
再将该信号连接到串口槽函数中,将点位通过串口发送给下位机,让下位机PCA9685驱动电机。

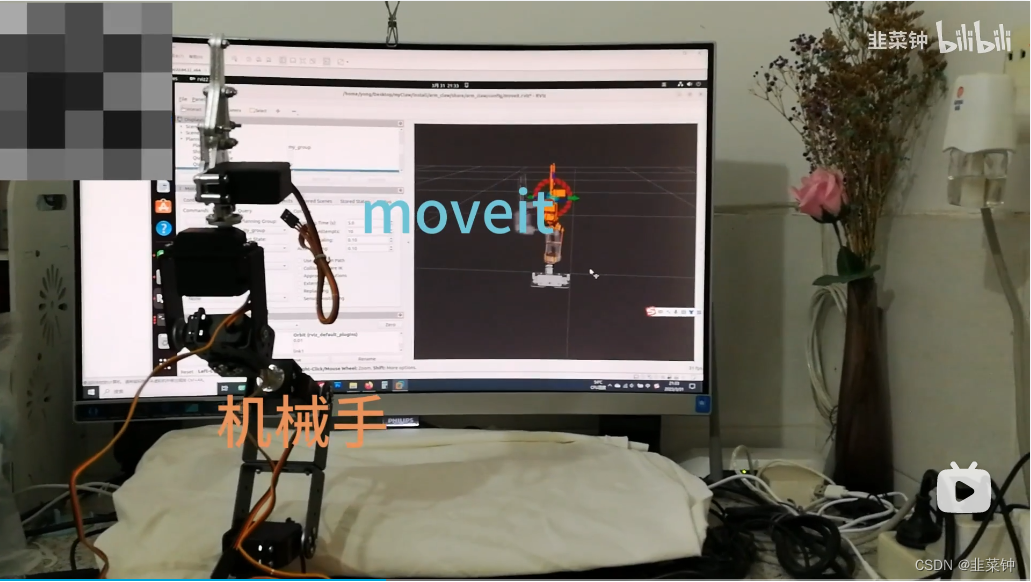
5.效果
整个系统的运行视频可以看这里:【ROS2中用MoveIt2控制自己的舵机机械手】
6.工程代码
整个项目的代码我放在了百度网盘,有兴趣的同学可以下载下来对比博客来慢慢看。
(在上位机代码里,可以看到有一些joint的旋转方向需要翻转,后来我继续研究了一下,发现可以在urdf中进行修正。改正后就不需要在代码里翻转了。各位弄自己的模型时,一定要注意这个问题,否则后面标定的话,会乱套。
同时,solidworks里面马达坐标系的轴方向最好是全部一致,比如都是长边为y、短边为x,z轴朝外。
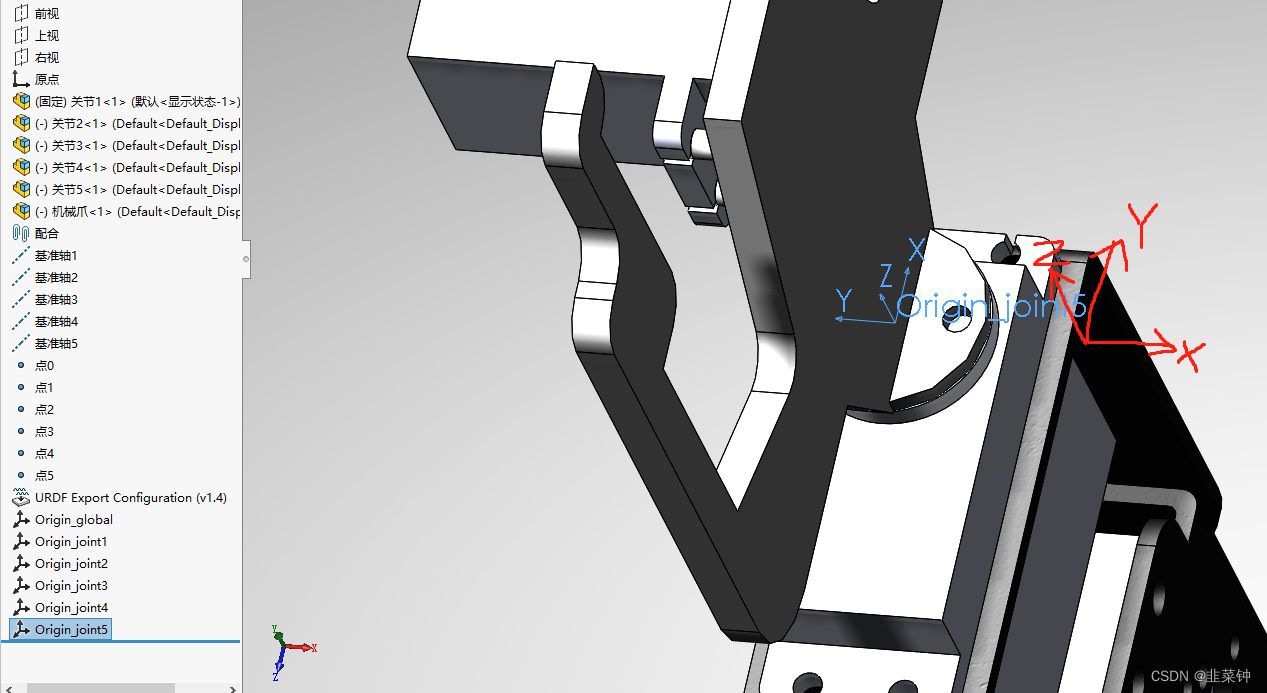
)
网址:https://pan.baidu.com/s/1oTOQ6x-VMjijK7c428DuKQ,提取码:rjdz。
里面一共三个文件:
MachineArm.zip、myArmTest.zip、myClaw.zip
MachineArm.zip是个stm32cubeIDE的工程,解压后可以用stm32cubeIDE打开。假如用的是别的下位机MCU(51,arduino或者其他的),可以只参考里面的 MachineArm\Core\Inc,Src路径下的pca9685文件。
myArmTest.zip是个Qt工程,我用的Qt版本是Qt5.15.2。里面实现了与下位机的串口通讯+与MoveIt的Action通讯。
代码myactionrobot.cpp中的85行应该为
int64_t duration = time_to_sleep.nanoseconds();
因为这个time_to_sleep是个duration,他的nanoseconds() 、seconds()是同样的意义的,而不是像前面的 time_from_start那样是分开统计汇总的。。。。
另外,myactionrobot.cpp的148行也要改一下。还是这个nanoseconds() 、seconds()的问题。
double timeSec = this->now().seconds(); qint32 sec = timeSec; jointStates.header.stamp.sec = sec; jointStates.header.stamp.nanosec = (timeSec - sec) * 1e9;
myClaw.zip里面是ROS2工程,里面有两个项目:claw_description以及arm_claw。claw_description用来提供urdf文件,arm_claw是用moveit_setup_assistant配合claw_description的urdf生成的项目。
假如想要启动整个项目(下位机假如需要你们用的不是stm32,需要自己根据实际情况调试一下),可以按照以下步骤执行。
6.1上位机启动
a、连接好串口。
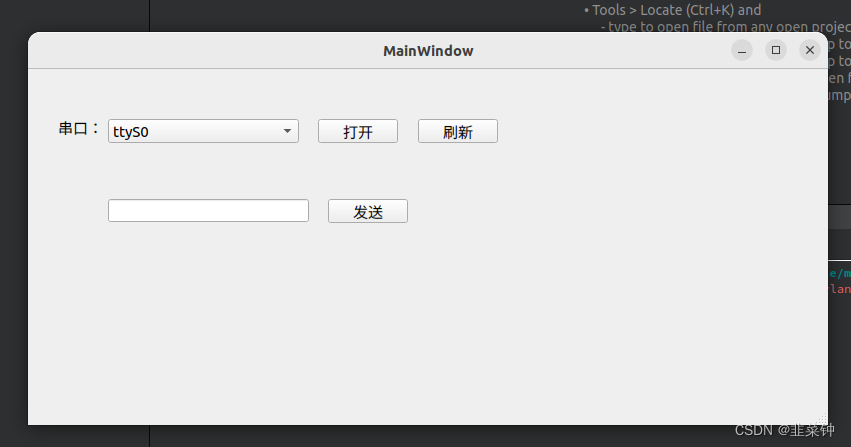
b、启动Qt程序:myArmTest,生成机器人节点。
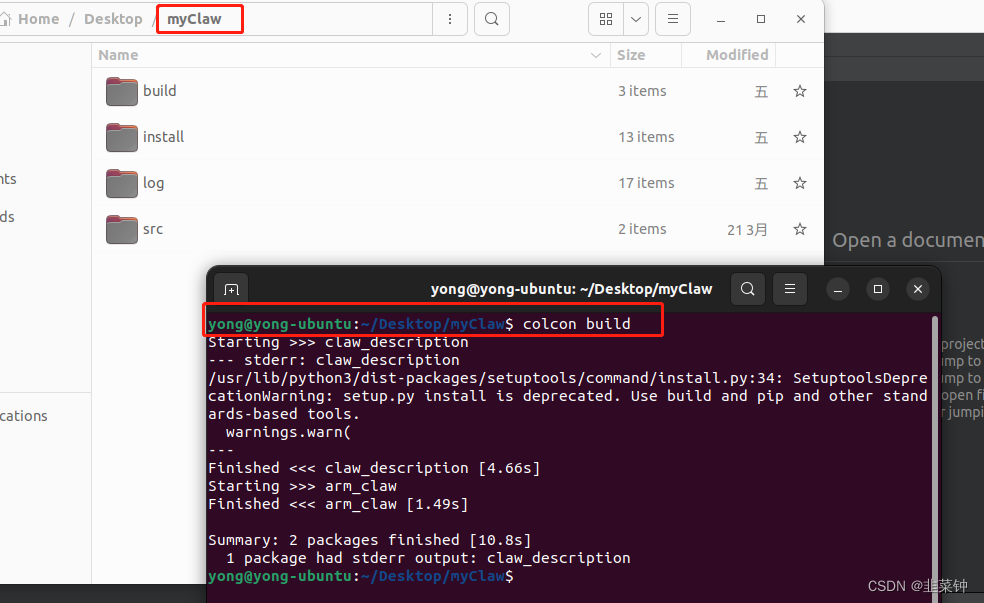
c、cd到myClaw。
d、执行编译
colcon build
 e、soure一下,目的是将本目录下的install目录下的东西(的路径)告知ROS系统,然后才可以利用ros2的各种指令对我们的项目进行操作:
e、soure一下,目的是将本目录下的install目录下的东西(的路径)告知ROS系统,然后才可以利用ros2的各种指令对我们的项目进行操作:
source install/setup.bash
f、执行以下命令,启动RobotStates节点
ros2 launch arm_claw my_claw.launch.py
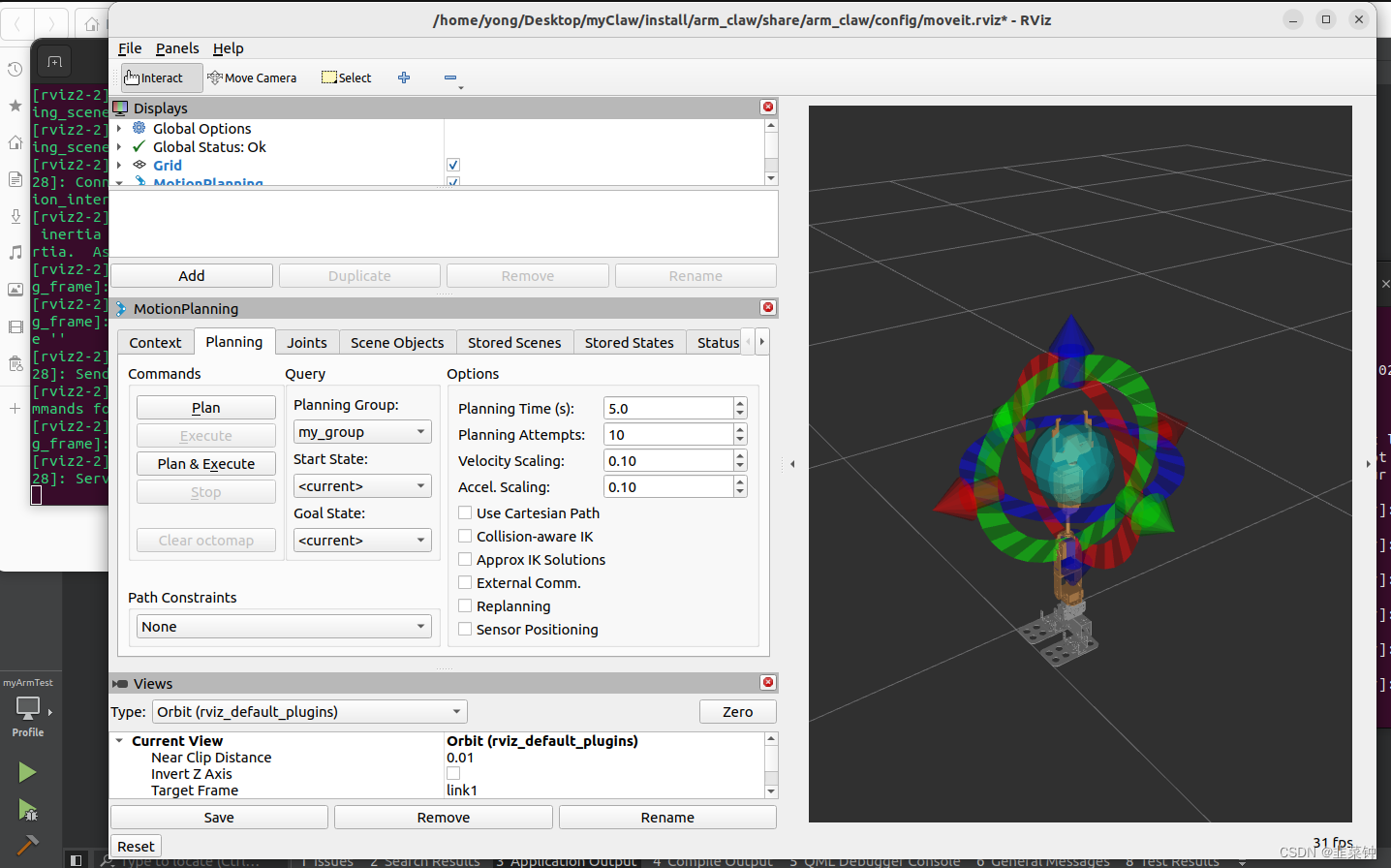
g、重新打开一个命令行,也cd到myClaw目录,也source一下,然后执行以下命令,启动MoveIt
ros2 launch arm_claw my_moveit_rviz.launch.py
如无意外的话,上位机就启动完了。
 执行规划的话,还可以在Qt那边看到输出:
执行规划的话,还可以在Qt那边看到输出:
6.2 下位机相关
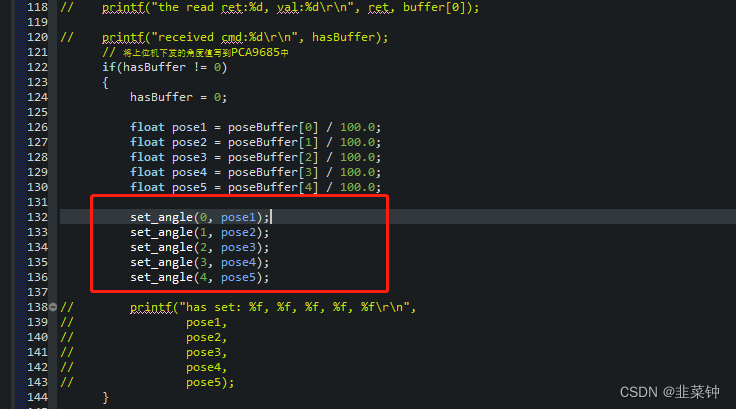
下位机与上位机的通讯是通过串口实现的。下位机目前相当于是单方面接收数据,并没有给上位机发送与轨迹规划有关的数据。所以理论上,这是个开环的控制系统,不要下位机也不影响我们调试上位机的。
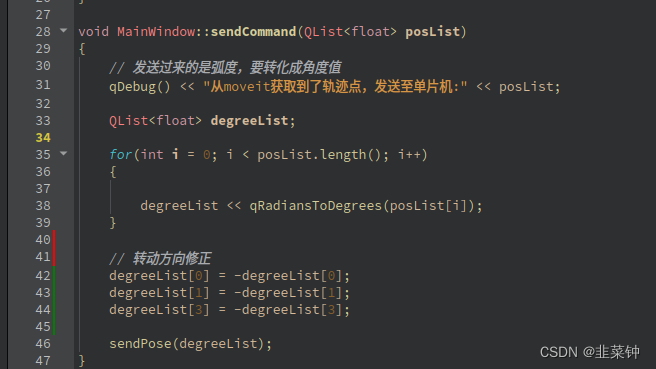
但是假如需要下位机执行上位机给出的指令,从而驱动机械手的话,只需要对上位机发送下去的5个角度值做文章就行。
7.总结
假如需要跑完整个项目,是需要一定的基础的。推荐看一下鱼香ROS的ROS2教程【动手学ROS2】,我也是从他的教程入门的。
该机械手在执行MoveIt规划的路径时,会一卡一卡的,主要是因为两方面的原因:1.机械结构松散、2.执行路径时没有进行插补。主要原因是插补、反馈问题,后面再慢慢完善了。
总之,暂时告一段落了。

















 9684
9684

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









