







 本文探讨了在虚幻4(UE4)中,如何理解和使用'将旋转朝向运动'功能。通过实验,作者发现 pawn(character)与 actor 在旋转时的关系,并解释了在开启该功能后,如何通过控制器旋转影响角色朝向。实验展示了actor的旋转会根据鼠标输入和'将旋转朝向运动'调整,而pawn则不再转动,进一步揭示了UE4中的角色运动逻辑。
本文探讨了在虚幻4(UE4)中,如何理解和使用'将旋转朝向运动'功能。通过实验,作者发现 pawn(character)与 actor 在旋转时的关系,并解释了在开启该功能后,如何通过控制器旋转影响角色朝向。实验展示了actor的旋转会根据鼠标输入和'将旋转朝向运动'调整,而pawn则不再转动,进一步揭示了UE4中的角色运动逻辑。
这篇日志是对第一篇的否定,即pawn不是角色脚底下相连的控制物,在人物蓝图中,pawn就是包括人物基础actor在内的character类,是个特殊的pawn。
公式pawn(character)=actor+controller
那个脚底下的东西应该是controller,但这个应该没有和actor连着
然后针对将旋转朝向运动的功能理解,我做了个量化比较实验。
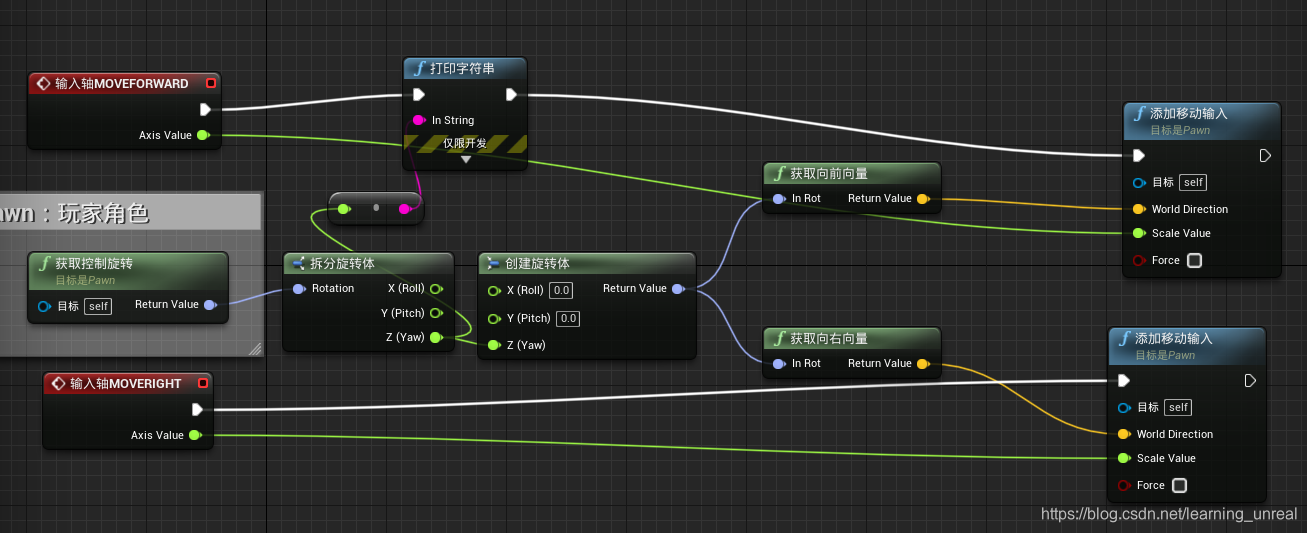
首先要有三个打印文本
人物蓝图中的“获取控制旋转”
动画蓝图中的“获取控制旋转”与“获取actor旋转
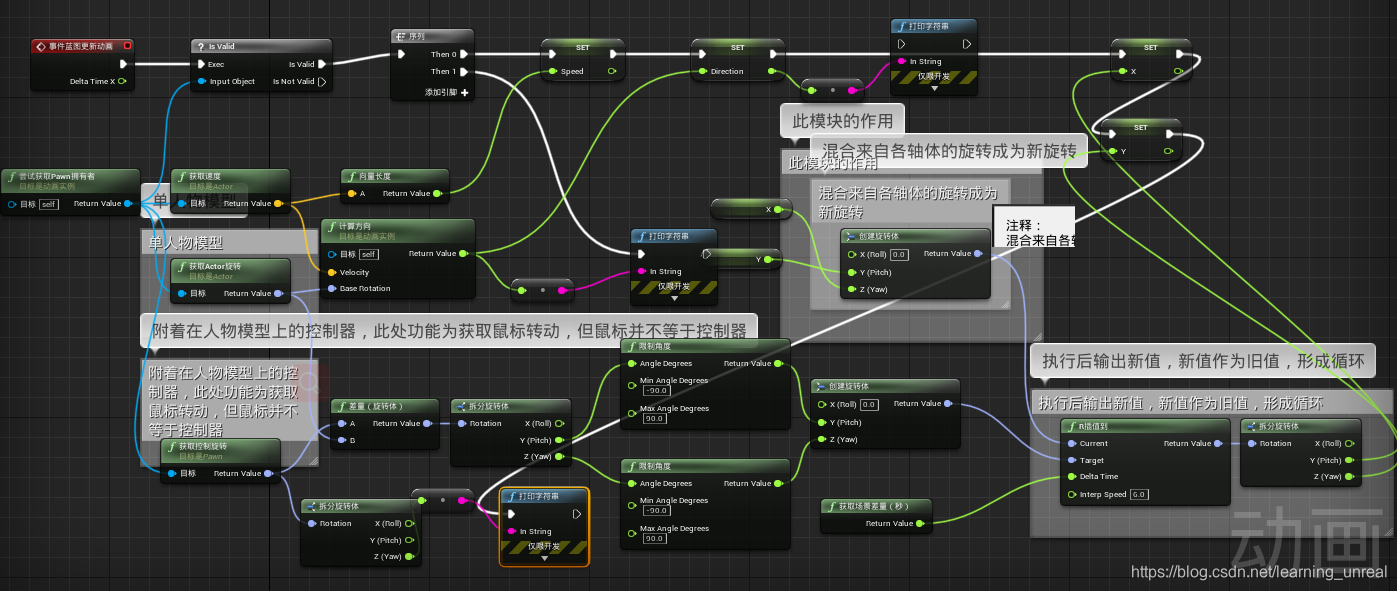
**有点杂乱,不过不影响,这实现的功能就是人物根据”wasd“按键形成行走动画+头部随鼠标有左顾右盼上仰下探的动画动作
只需要关注”获取控制旋转“到后面的”打印文本“以及”获取actor“旋转到后面的打印文本
前提是除了第一张蓝图实现的”wasd“运动蓝图外外,你还编写好了靠鼠标变换视角的事件蓝图
然后先将摄像机设置全打勾(人物蓝图——springarm——细节面板——摄像机设置)
将chara
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 4049
4049

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









