







旋转矩阵的推导要注意最关键的一点,就是我们需要的是坐标系的旋转变换,而不是点的旋转变换。大部分解释是第二条推导,所以感觉上就不能说服人。
本文转自这个链接:旋转矩阵怎么推导_如何推导旋转矩阵_独孤小白兔的博客-CSDN博客

极坐标系和直角坐标系是等价的,在极坐标系下,一个点可以表示为(r,θ),在直角坐标系下,表示为(x,y)。选取哪种坐标系是看哪种坐标系比较方便,在直角坐标系下处理直线、平移等非常方便;在极坐标系下,旋转操作非常方便。如果想在直角坐标系下进行旋转操作,则需要旋转矩阵进行操作。
旋转矩阵推导,方式一:
在极坐标系下一个点的坐标,用角度和长度表示即可,在直角坐标系下一个点的坐标,用x,y来表示
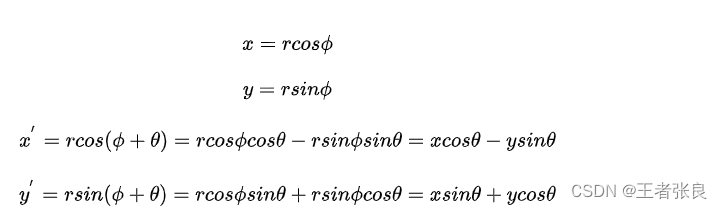
得出

所以旋转矩阵为

注意:θ是转换后的X'轴与初始X轴的夹角,不是向量的夹角。
旋转矩阵的推导,方式二:
A点相对于老坐标系(黑色坐标系)的方位与B点相对于新坐标系(红色坐标系)的方位一致,因此
B点坐标,在新坐标系下,坐标值与 A点坐标,在老坐标系下,坐标值 一样一样的
那么A点在老坐标系下的坐标值(x,y)是已知的,因此只要知道,新坐标系相对于老坐标系的旋转情况(旋转矩阵)就能知道,B点在老坐标系下的坐标(x',y')了
即(x',y')=旋转矩阵*(x,y)
(1) 老坐标系下x轴(黑色)的单位基矢i可以表示为:

y轴的单位基矢j,相当于x轴的单位基矢i逆时针旋转90°,可以表示为:

(2)我们现在写出新坐标系的旋转情况,
新坐标系的x轴相对于老的x轴旋转了θ则

新坐标系的y轴相对于老的y轴旋转了θ则

新坐标系相对于老坐标系的旋转可表示为(i',j'),即旋转矩阵

(3)因此得出(x',y')=旋转矩阵*(x,y)
方式一是他的代数解释,方式二更像几何图像解释,更直观,两者一致

















 2858
2858

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









