






改进DH参数小结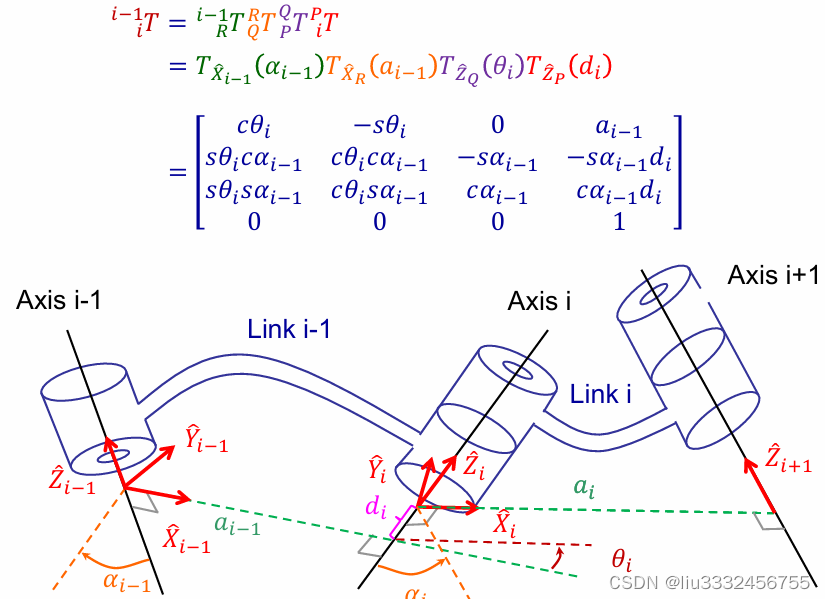
首先,建立Z轴方向,改进的DH建立在杆link i-1的前端,然后往后面建立联系,ai-1与杆link i-1对应,ɑi-1与轴i-1对应。ai-1是直线垂直于Zi-1和Zi 轴的距离,ɑi-1是Zi-1 和Zi 轴的夹角,di是ai-1和ai的X轴的距离,θi是ai-1和ai的X轴的夹角。
标准DH参数小结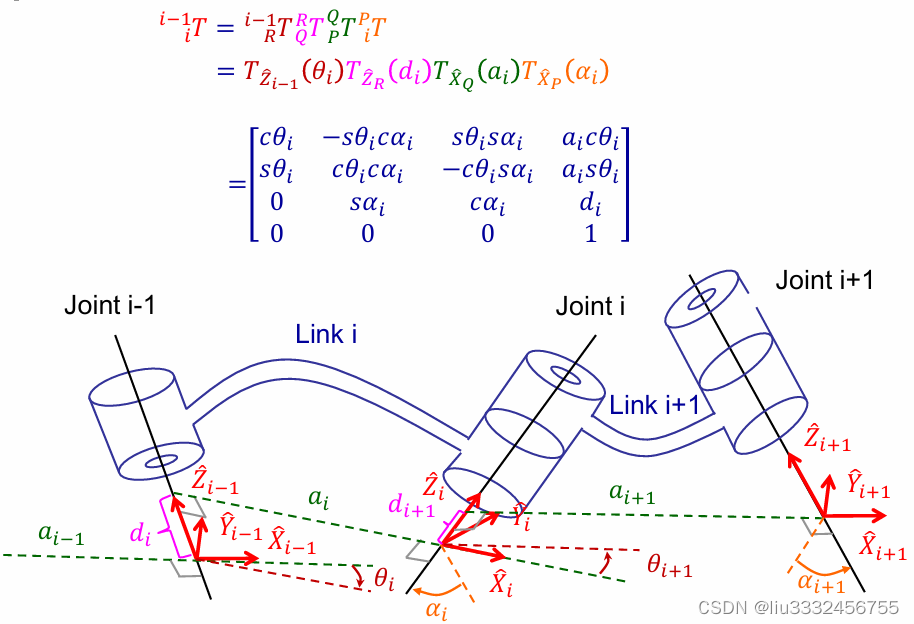
首先,建立Z轴方向,标准的DH建立在杆link i的后端,然后往前面建立联系,ai与杆link 对应,ɑi与轴i对应。ai是直线垂直于Zi-1和Zi 轴的距离,ɑi-1是Zi-1 和Zi 轴的夹角,di是ai-1和ai的X轴的距离,θi是ai-1和ai的X轴的夹角。















 200
200

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









