






 本文介绍了矢量分析的深入内容,包括高斯、斯托克斯、格林和亥姆霍兹四个重要积分定理的应用,以及直角、圆柱和球坐标系的转换及其在矢量场中的作用。还讨论了散度、旋度和梯度的概念,以及这些在描述物理场性质中的关键角色。
本文介绍了矢量分析的深入内容,包括高斯、斯托克斯、格林和亥姆霍兹四个重要积分定理的应用,以及直角、圆柱和球坐标系的转换及其在矢量场中的作用。还讨论了散度、旋度和梯度的概念,以及这些在描述物理场性质中的关键角色。
上一篇的矢量分析(一)已经说明矢量的基本运算、标量场的梯度、矢量场的散度与旋度。这一篇的矢量分析(二)将说明矢量的积分定理和三个常用的坐标系。
矢量积分定理
这里介绍4个重要的矢量积分定理,分别是高斯定理、斯托克斯定理、格林定理和亥姆霍兹定理。
高斯散度定理
高斯定理的公式如下:
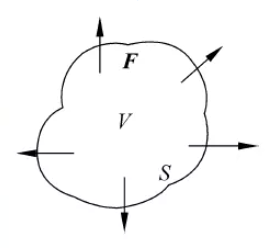
式中,S为包围体积V的闭合曲面,面元矢量的方向为闭合曲面外法线方。高斯定理说明了矢量场F散度的体积分等于该矢量穿出包围体积的封闭曲面S的总通量。
高斯定理的直观图像可见下图所示:
斯托克斯定理
斯托克斯定理的公式如下:
式中,为任意曲面S的边界,
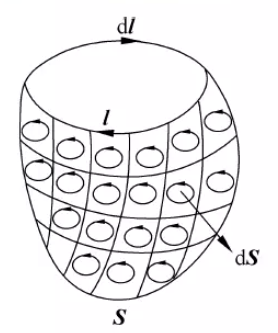
的绕行方向与曲面S的法线方向满足右手定则。斯托克斯定理定理说明,任一矢量场F的旋度穿出某一曲面S的通量等于此矢量场F沿该曲面S边缘的闭合路径
的环量。
设一个闭合回路,有一个曲面S由环路
所支撑,好像是渔网S被铁环
所支撑,将曲面S划分成很小的网,给每个网上计算场F的环路积分,将整个曲面上的环路积分相加,就可以得到的是铁丝圆圈
上的环路积分。如下图所示:
格林定理
格林定理也可以称为格林公式或者是格林恒等式,它是由高斯散度定理推导出的一个重要的定义。
令矢量函数,其中ψ和φ都是任意的标量函数,则矢量F的散度可写为
应用高斯定理,可得
上式被称为格林第一公式。如果将两个标量函数相互交换,等式依然成立。可得
将上述两式相减,可得
上式被称为格林第二公式。在这个公式中,面元矢量,将标量函数的梯度沿着
的法向方向和切向方向分解,可得
,式中,n是面元矢量的法线方向单位向量,而t是面元矢量的切向方向单位向量。标量n和t分别为这两个方向上的坐标变量,又因为
,可以得到以下关系
那么格林第二公式还可以写成以下的形式:
另外,如果考虑到梯度与方向导数之间的关系,也就是,那么上述结论也是可以推出的。
亥姆霍兹定理
标量场的梯度、矢量场的散度和旋度都可以从不同侧面描述物理场的性质。一个矢量场所具有的性质,完全可由它的散度和旋度来表征;而一个标量场的性质则完全可由它的梯度来表征。这是因为矢量场的散度描述了矢量场沿场量本身方向上的变化率,而其旋度则描述了与场量垂直方向上的变化率,因而一个矢量场各分量的偏导数的许多可能的组合中的两种特定的组合即散度和旋度,能够共同确定一个矢量场的全貌。事实上,任何一种物理的场都必须有某种源,因为场由源引起,且同源一起出现。矢量场的散度和旋度分别对应着矢量场F(r)的两种源:散度对应着通量源,旋度则对应着旋源。而源的分布决定着场的分布,当然也就决定了场量沿各个方向的变化。所以,散度和旋度给出了矢量场F(r)的全部信息。
而亥姆霍兹定理可以描述为:若矢量场F(r)在无界空间中处处单值,且其导数连续有界,则该矢量场F(r)唯一地由其散度和旋度所确定。
可见任何一个矢量场都可以分解成一个无散场分量和一个无旋场分量
的之和。即:
如果已知场量的散度源和旋度源分别为和
,可得:
再根据亥姆霍兹定理可得:
上述两式就是矢量场F(r)的基本方程,求解这两个基本方程就可以得到矢量场F(r)的解。
三种常用的坐标系
在这里,会介绍直角坐标系、圆柱坐标系和球坐标系,这三种常见的正交曲线坐标系。另外还会介绍这三种坐标系的区别和联系。
坐标变换与基本单位矢量
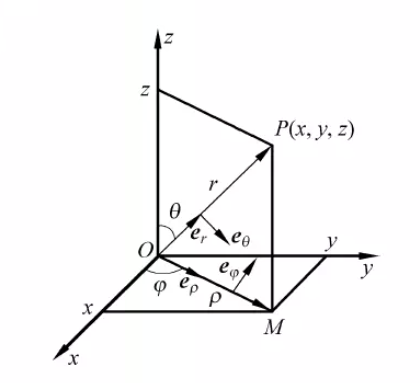
如上图所示,直角坐标系的坐标变量为x,y和z,基本单位矢量为,分别沿着x,y和z增加的方向。圆柱坐标系的坐标变量为ρ,φ和z,基本单位矢量为
,分别沿着ρ,φ和z增加的方向。球坐标系的坐标变量为ρ,φ和θ,基本单位矢量为
,分别沿着ρ,φ和θ增加的方向。
在正交坐标系中,基本单位矢量满足右手定则,即:
当同一坐标系中的基矢进行叉乘时,相同基矢叉乘为0,不同基矢叉乘时见上式。事实上,在正交坐标系中,基矢都满足类似的叉乘关系,它们在空间任一点构成了一个“本地”的“直角坐标系”,但空间不同位置处,相同的基矢方向也不同。
三种坐标系的基矢、坐标变量和变化范围总结如下:
| 基 矢 | 坐 标 变 量 | 变化 范 围 | |
| 直角坐标系 | x,y,z | ||
| 圆柱坐标系 | ρ,φ,z | ||
| 球坐标系 | ρ,φ,θ |
坐标变量之间的关系
直角坐标系和圆柱坐标系之间:
直角坐标系和球坐标系之间:
圆柱坐标系和球坐标系之间:

基本单位矢量之间的关系
在不同坐标系之间转换的时候,除了要转换坐标变量,还要转换各个坐标系中的单位基本矢量。这个时候就需要使用到单位圆法。
单位圆法是在选定的合适坐标平面上,以点P为圆心,以1为半径作一个圆,以P为始点做出所有基矢,将欲转换的基矢作为直角三角形的斜边,目标基矢所在方向画出直角边,此斜边的基矢是目标基矢对应直角边的矢量和。
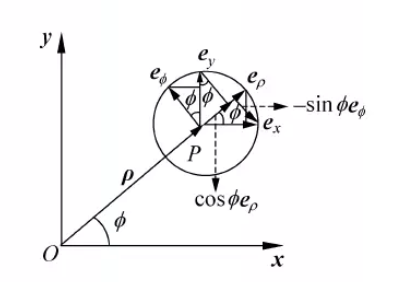
直角坐标系和圆柱坐标系的z轴是相同的。如上图所示,在垂直于z轴( z轴是垂直于纸面向外)的xoy平面,选择一点P,以P点为圆心,以1为半径画一个单位圆。从P点分别作出,然后在
的终点向
做出垂线,将
作为了直角三角形的斜边,那么
在
和
上可以分解为
和
,所以,
,同理可得其他基矢的转换关系:
使用矩阵可以表示为:
(1式)
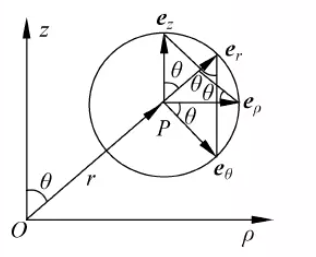
上图是圆柱坐标系和球坐标系之间的基本矢量的转换单位圆。模仿上面的过程,就可以得到下面的圆柱坐标系和球坐标系的基矢转换矩阵:
(2式)
将1式带入2式,可得到球坐标系的基矢用直角坐标系的基矢表示的关系:
将上式左乘系数矩阵的逆矩阵,就可以得到直角坐标系的基矢用球坐标系的基矢表示的关系:

















 6154
6154

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









