






ROS中的IMU惯性测量单元消息包
IMU (Inertial Measurement Unit) 惯性测量单元 - 一种安装在机器人内部的传感器模块,用于测量机器人的空间姿态。

IMU消息包格式:
# 这是一条信息,用于保存来自 IMU(惯性测量单元)的数据
#
# 加速度单位应为 m/s^2(而不是 g),旋转速度单位应为 rad/sec。
#
# 如果协方差数值已知,就将其填充到协方差矩阵中。
# 若协方差数值未知,则将协方差矩阵全部置为零。
#
# 若协方差矩阵对应的数值不存在(比如IMU没有输出orientation姿态数据),那么该协方差矩阵的第一个数值置为-1。
# 如果要使用的这个消息包里的某个数据,需要先对其协方差矩阵的第一个数值进行判断:
# 如果数值为-1,表明要使用的数据是不存在的,不要再去读取它。
#
Header header
geometry_msgs/Quaternion orientation # 空间位姿
float64[9] orientation_covariance # Row major about x, y, z axes 协方差矩阵
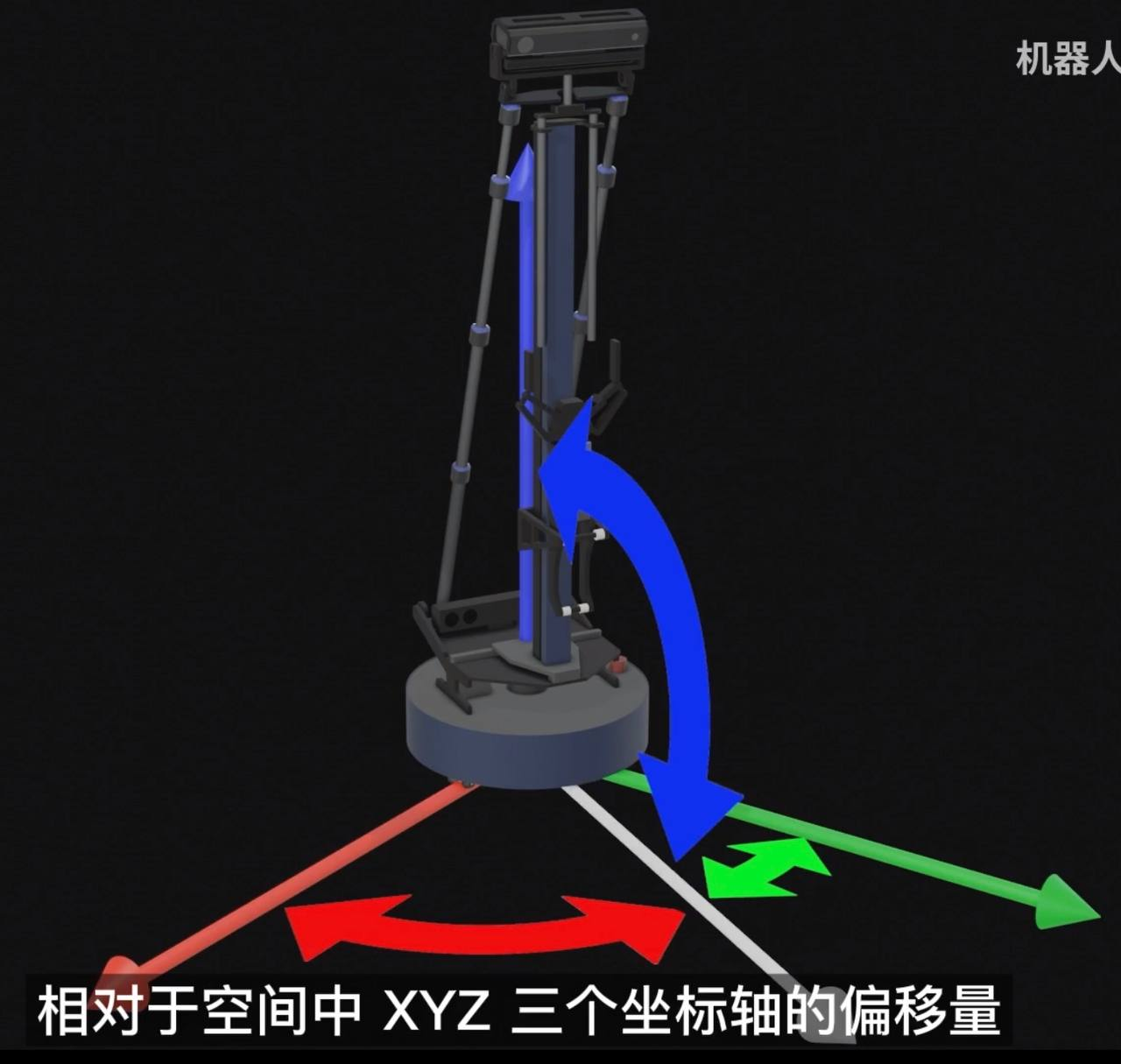
geometry_msgs/Vector3 angular_velocity # 描述机器人在XYZ三个坐标轴上的旋转速度,由IMU测量到的输入值。
float64[9] angular_velocity_covariance # Row major about x, y, z axes 协方差矩阵。
geometry_msgs/Vector3 linear_acceleration # 三个坐标轴上的矢量加速度,即速度的增减情况。
float64[9] linear_acceleration_covariance # Row major x, y z 协方差矩阵,用于后期的优化和滤波。
包含angular_velocity旋转加速度和linear_acceleration矢量加速度一共六个轴的数值分量的IMU模块,就是常说的六轴IMU。
另外有些IMU模块额外提供了XYZ三个轴向的磁强计输出,就变成了九轴IMU。
磁强计数据在ROS中有专门的消息格式,没有包含在这个IMU消息包中。
机器人在XYZ三个坐标轴的旋转速度和矢量加速度都是直接测量到的数据,也叫裸数据。
而根据这些数值融合得到的空间姿态描述,就是消息包格式中的第一个Quaternion orientation。
他描述的是机器人的朝向相对于空间中XYZ三个坐标轴的偏移量。
orientation是一个Quaternion(四元数)类型的数值。四元数是为了解决欧垃角中存在的万向锁的问题。
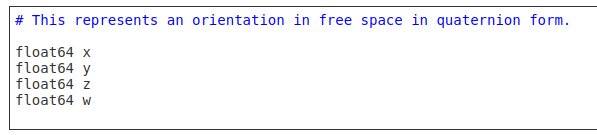
使用x,y,z,w四个值来描述机器人朝向。
欧拉角和万向锁
欧拉角是由三个角度表示,表示物体从原始姿态到目标姿态的一个变换。无论(α,β,γ)三个角度值是多少,都是得从物体的原始姿态开始进行绕轴进行旋转。所以物体的姿态都是相对于其最原始姿态的,上述图例中说到的,先绕X轴旋转30度,再绕Y轴旋转90度,再绕Z轴旋转10度得到的最终姿态和先绕X轴旋转20度,再绕Y轴旋转90度的结果一样。因此相对于最初姿态而言,当一个欧拉角包含绕Y轴旋转90度时,绕X轴和绕Z轴旋转已经是在绕同一个轴在进行旋转,这个时候只有两个轴在起作用。这个时候就是万向锁的状态。
自己拿一个手机来做一下试验,有助于理解万向锁:
可以拿出手机放在桌面上,屏幕朝上,手机的最长边垂直与桌子的边缘设置为X轴,这个时候屏幕的短边平行于桌子的边缘设置为Y轴,因此垂直与屏幕的向量为Z轴。我们先绕手机的最长边X轴顺时针旋转30度,这个时候手机离开桌面,留下一个长边与桌子接触;然后再绕Y轴,也就是手机的短边旋转90度,让屏幕面与桌子的边缘平行;再绕Z轴旋转10度,也就是绕垂直于屏幕的轴旋转10度,这个时候你会发现,绕Z轴旋转时,屏幕面还是平行桌子的边缘,而此时绕Z轴旋转的角度给手机姿态带来的影响和最开始旋转X轴给手机姿态带来的影响是一样的——都是使手机最终的姿态(已经绕Y轴旋转了90度使得手机屏幕与桌子边缘平行)为绕着垂直于屏幕的轴旋转一定的角度。你完全可以不用绕Z轴旋转,通过调节绕X轴旋转的角度数,使得最终手机的姿态和上述旋转过程达到的姿态一样。此时就是造成了万向锁。
使用C++实现IMU数据获取
首先需要直到IMU的话题:
- imu/data_raw (sensor_msgs/Imu)
加速度计输出的矢量加速度和陀螺仪输出的旋转角速度
- imu/data (sensor_msgs/Imu)
imu/data_rawd的数据再加上融合后的四元数姿态描述
- imu/mag (sensor_msgs/MagneticField)
磁强计输出磁强数据
接下来构建一个数据获取节点:

实现步骤:
-
构建一个新的软件包,包名叫做
imu_pkg。 -
在软件包中新建一个节点,节点名叫做
imu_node。 -
在节点中,向ROS大管家NodeHandle申请订阅话题
/imu/data,并设置回调函数为IMUCallback()。 -
构建回调函数
imuCallback(),用来接收和处理IMU数据。 -
使用TF工具将四元数转换成欧辣角。
-
到用
ROS_INFO()显示转换后的欧拉角数值。
代码如下:
#include "ros/ros.h"
#include "sensor_msgs/Imu.h"
#include "tf/tf.h"//
void IMUCallback(sensor_msgs::Imu msg)
{
if(msg.orientation_covariance[0] < 0) // 协方差矩阵的第一个元素小于0,说明IMU没有准备好
{
ROS_INFO("IMU is not ready!");
return;
}
else
{
tf::Quaternion quaternion(
msg.orientation.x,
msg.orientation.y,
msg.orientation.z,
msg.orientation.w
); // 将消息包里的四元数转换成tf里的四元数,以便使用TF工具将四元数转换成欧拉角。
double roll, pitch, yaw;// roll - 滚转角 pitch - 俯仰角 yaw - 偏航角 定义欧拉角变量
tf::Matrix3x3(quaternion).getRPY(roll, pitch, yaw);//使用TF工具先将四元数转换成一个3x3的矩阵,再将矩阵转换成欧拉角。
roll = roll * 180.0 / M_PI;//将弧度转换成角度
pitch = pitch * 180.0 / M_PI;
yaw = yaw * 180.0 / M_PI;
ROS_INFO("滚转角 = %.0f, 俯仰角 = %.0f, 偏航角 = %.0f", roll, pitch, yaw);//打印欧拉角
}
}
int main(int argc, char *argv[])
{
setlocale(LC_ALL, "zh_CN.UTF-8");
ros::init(argc, argv, "imu_node");
ros::NodeHandle n;
ros::Subscriber imu_sub = n.subscribe("/imu/data", 10, IMUCallback); // 订阅IMU数据
ros::spin(); //让节点持续运行
return 0;
}
修改编译规则:
add_executable(imu_node src/imu_node.cpp)
add_dependencies(imu_node ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
target_link_libraries(imu_node
${catkin_LIBRARIES}
)
编译cpp文件。
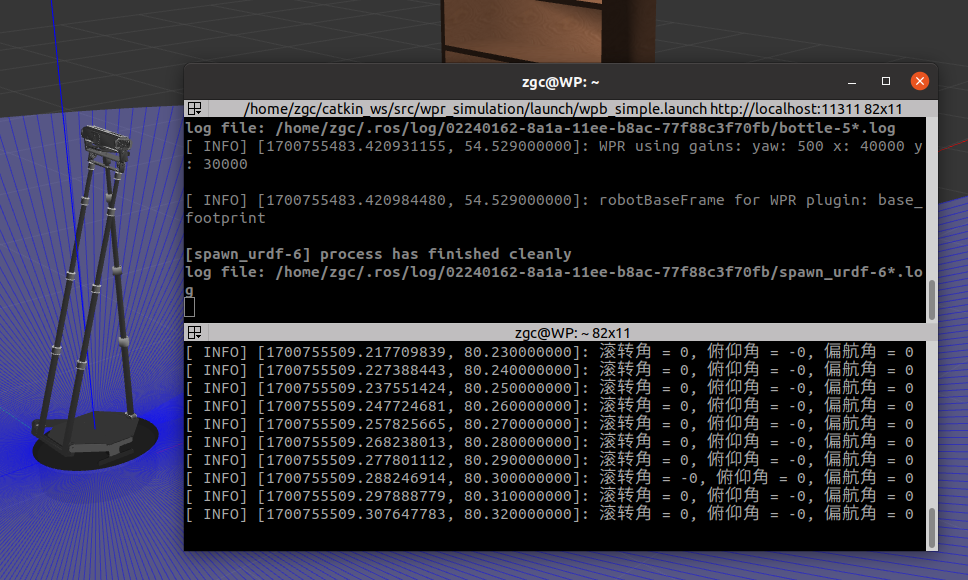
接下来终端输入
roslaunch wpr_simlation wpb_simple.launch
rosrun imu_pkg imu_node
得到结果如下:
获取IMU数据的Python节点
实现思路和C++大致相同
不同的是:首先需要shebang。
#!usr/bin/env python3 是一个称为 shebang 的特殊行,它在 Unix 和 Unix-like 系统(如 Linux)中用于指示脚本的解释器。
这行代码的意义是:当你尝试运行这个脚本时,系统会使用 /usr/bin/env 命令来找到 python3 解释器,并使用它来执行脚本。
详细解释如下:
-
#!:这是 shebang 的开始,它告诉系统这个文件是一个脚本,而不是一个二进制文件。 -
/usr/bin/env:这是一个 Unix 命令,它可以在系统的 PATH 环境变量中查找指定的程序。使用env而不是直接指定解释器的路径(例如/usr/bin/python3)的好处是,它允许脚本在不同的系统上运行,即使python3的路径在不同的系统上可能不同。 -
python3:这是你想要用来执行脚本的解释器。在这个例子中,它是 Python 3 解释器。
注意,为了让这个 shebang 行生效,你需要给脚本添加可执行权限。你可以使用 chmod 命令来做这件事,例如 chmod +x imu_node.py。然后,你就可以直接运行这个脚本,例如 ./imu_node.py,而不需要先调用 Python 解释器,例如 python3 imu_node.py。
代码如下:
#!/usr/bin/env python3
#coding = utf-8
import rospy
from sensor_msgs.msg import Imu
from tf.transformations import euler_from_quaternion
import math
def imu_callback(msg):
if msg.orientation_covariance[0] < 0:
return
else:
quaternion = [
msg.orientation.x,
msg.orientation.y,
msg.orientation.z,
msg.orientation.w
]
(roll, pitch, yaw) = euler_from_quaternion(quaternion)# 从四元数转换为欧拉角
roll = roll*180/math.pi
pitch = pitch*180/math.pi
yaw = yaw*180/math.pi
rospy.loginfo("滚转角 = %.0f, 俯仰角 = %.0f, 朝向角 = %.0f", roll, pitch, yaw)
if __name__ == "__main__":
rospy.init_node("imu_node")
imu_sub = rospy.Subscriber("/imu/data", Imu, imu_callback, queue_size=10)
rospy.spin()
IMU航向锁定C++
在上一节建立的数据获取节点imu_node中添加发布运动控制指令的功能,使机器人能对姿态的变化做出反应,实现航向锁定的效果。
实现步骤:
- 让大管家NodeHandle发布速度控制话题
/cmd_vel。 - 设定一个目标朝向角,当姿态信息中的朝向角和目标朝向角不一致时,控制机器人转向目标朝向角。
代码如下:
首先在函数外定一个全局变量 ros::Publisher vel_pub,
然后在main函数中添加代码让rospy大管家发布节点速度控制话题/cmd_vel。
vel_pub = n.advertise<geometry_msgs::Twist>("/cmd_vel", 10)
最后在回调函数中添加如下代码:
double target_yaw = 90;// 目标角度为90度
double diff_angle = target_yaw - yaw; // 计算目标角度与当前角度的差值
geometry_msgs::Twist vel_cmd;// 定义速度控制指令变量
vel_cmd.angular.z = diff_angle * 0.01;// 速度控制,比例系数为0.01
vel_cmd.linear.x = 0.1;// 机器人直线前进速度为0.1m/s
vel_pub.publish(vel_cmd);// 发布速度控制指令,控制机器人转向接近目标角度
IMU航向锁定Python
实现步骤和C++类似
代码如下:
global vel_pub # 定义速度发布者为全局变量
vel_pub= rospy.Publisher("/cmd_vel", Twist, queue_size=10) # 定义速度发布者,发布话题为/cmd_vel
## 回调函数中加入以下代码:##
target_yaw = 90
diff_angle = target_yaw -yaw # 计算目标角度与当前角度的差值
vel_cmd = Twist() # 定义速度消息
vel_cmd.angular.z = diff_angle*0.01 # 转向速度控制,比例系数为0.01
vel_cmd.linear.x = 0.1 # 0.1m/s
vel_pub.publish(vel_cmd)















 1096
1096











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









