







感谢b站up 机器人工匠阿杰
文章仅供个人学习使用
工具软件
Rviz:全称 The Robot VisualZation Tool
可视化状态观测
Gazebo:仿真,模拟发出传感器数据
运动控制
运动表示
矢量运动:右手坐标系,单位m/s
旋转运动:右手坐标系,单位rad/s
比如旋转速度3.14,表示一秒钟转半圈
消息包:
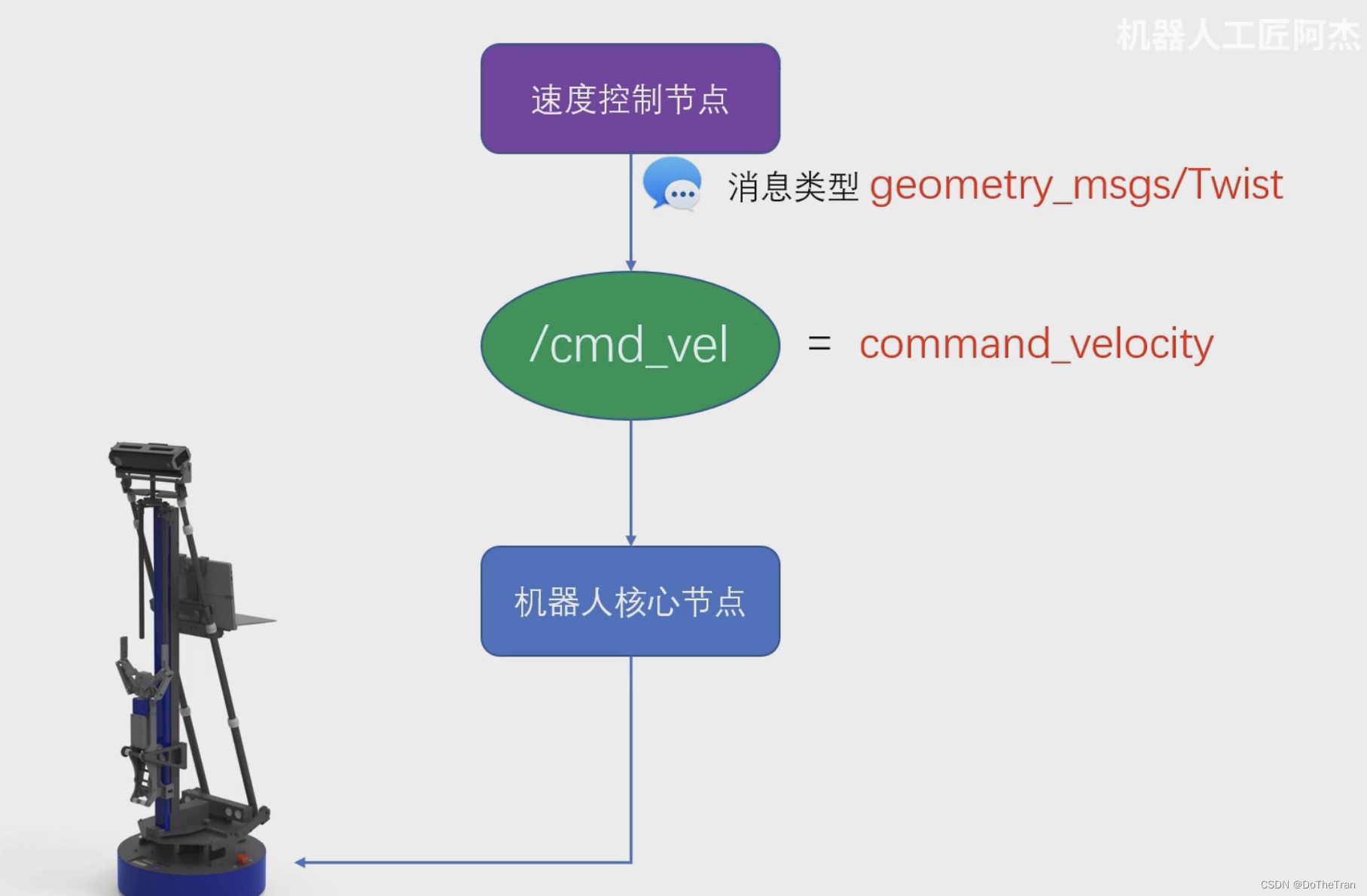
geometry_msgs 软件包的 twist 消息类型,包含两个数据成员:
liner:float x,float y,float z
angular:float x,float y,float z
机器人配套的程序源码通常会有个核心节点,向上会订阅速度话题,通常话题名称是/cmd_vel;向下能控制底层硬件。
例程
创建软件包、节点
cd ~/catkin_ws/src/
catkin_create_pkg vel_pkg roscpp geometry_msgs
在src目录下编写cpp节点:vel_node.cpp
#include <ros/ros.h>
#include <geometry_msgs/Twist.h>
int main(int argc, char *argv[])
{
ros::init(argc, argv, "vel_node");
ros::NodeHandle n;
ros::Publisher vel_pub = n.advertise<geometry_msgs::Twist>("/cmd_vel",10);
geometry_msgs::Twist vel_msg;
vel_msg.linear.x = 0.1;
vel_msg.linear.y = 0;
vel_msg.linear.z = 0;
vel_msg.angular.x = 0;
vel_msg.angular.y = 0;
vel_msg.angular.z = 0;
ros::Rate rate(30);
while(ros::ok())
{
vel_pub.publish(vel_msg);
rate.sleep();
}
return 0;
}
cmakelist添加:
add_executable(vel_node src/vel_node.cpp)
target_link_libraries(vel_node
${catkin_LIBRARIES}
)
雷达
消息包
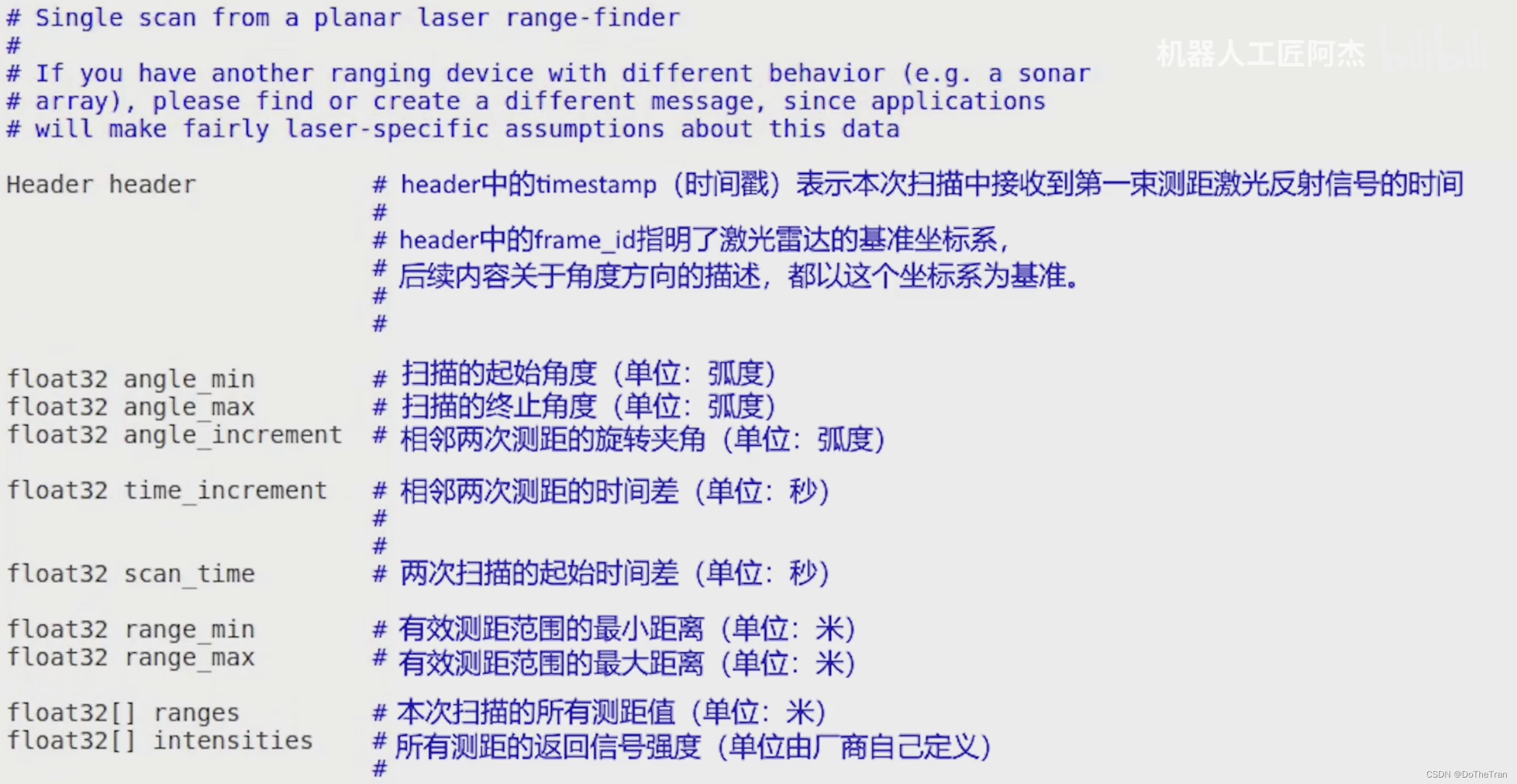
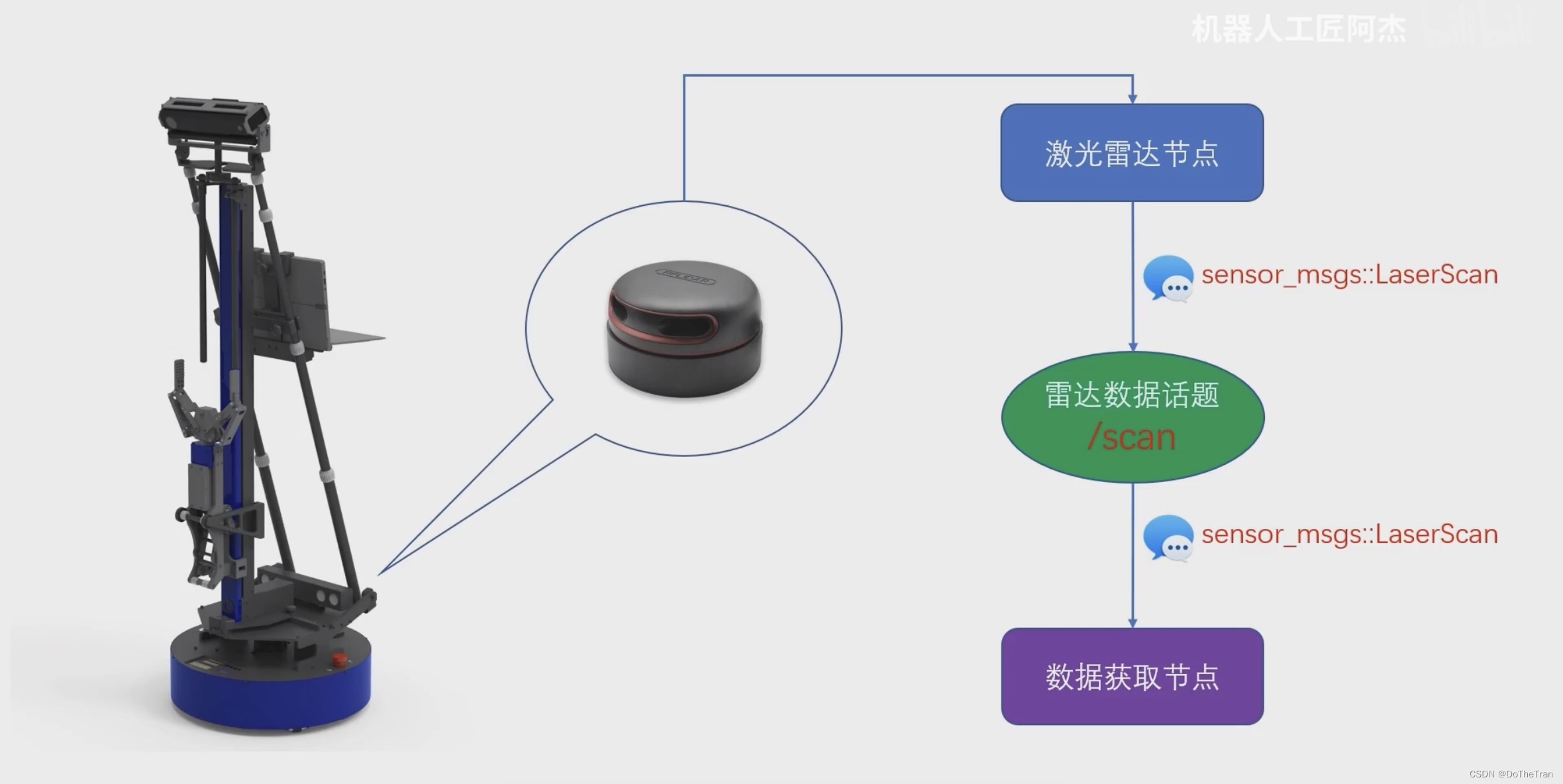
sensor_msgs 的 LaserScan
显示雷达话题:
rostopic echo /scan --noarr
雷达 话题 和 消息包名称 是约定俗成的
编写雷达避障节点
catkin_create_pkg lidar_pkg roscpp sensor_msgs
#include <ros/ros.h>
#include <std_msgs/String.h>
#include <sensor_msgs/LaserScan.h>
#include <geometry_msgs/Twist.h>
// 速度消息发布对象(全局变量)
ros::Publisher vel_pub;
static int nCount = 0;
void LidarCallback(const sensor_msgs::LaserScan msg)
{
int nNum = msg.ranges.size();
int nMid = nNum/2;
float fMidDist = msg.ranges[nMid];
ROS_INFO("前方测距 ranges[%d] = %f 米", nMid, fMidDist);
if(nCount > 0)//检测后延时检测
{
nCount--;
return;
}
geometry_msgs::Twist vel_cmd;
if(fMidDist < 1.5f)
{
vel_cmd.angular.z = 0.3;
nCount = 50;
}
else
{
vel_cmd.linear.x = 0.05;
}
vel_pub.publish(vel_cmd);
}
int main(int argc, char** argv)
{
setlocale(LC_ALL,"");
ros::init(argc,argv,"lidar_node");
ros::NodeHandle n;
ros::Subscriber lidar_sub = n.subscribe("/scan", 10, &LidarCallback);
vel_pub = n.advertise<geometry_msgs::Twist>("/cmd_vel",10);
ros::spin();
}
IMU
消息包
IMU是惯性测量单元
sensor_msgs 的 Imu 消息
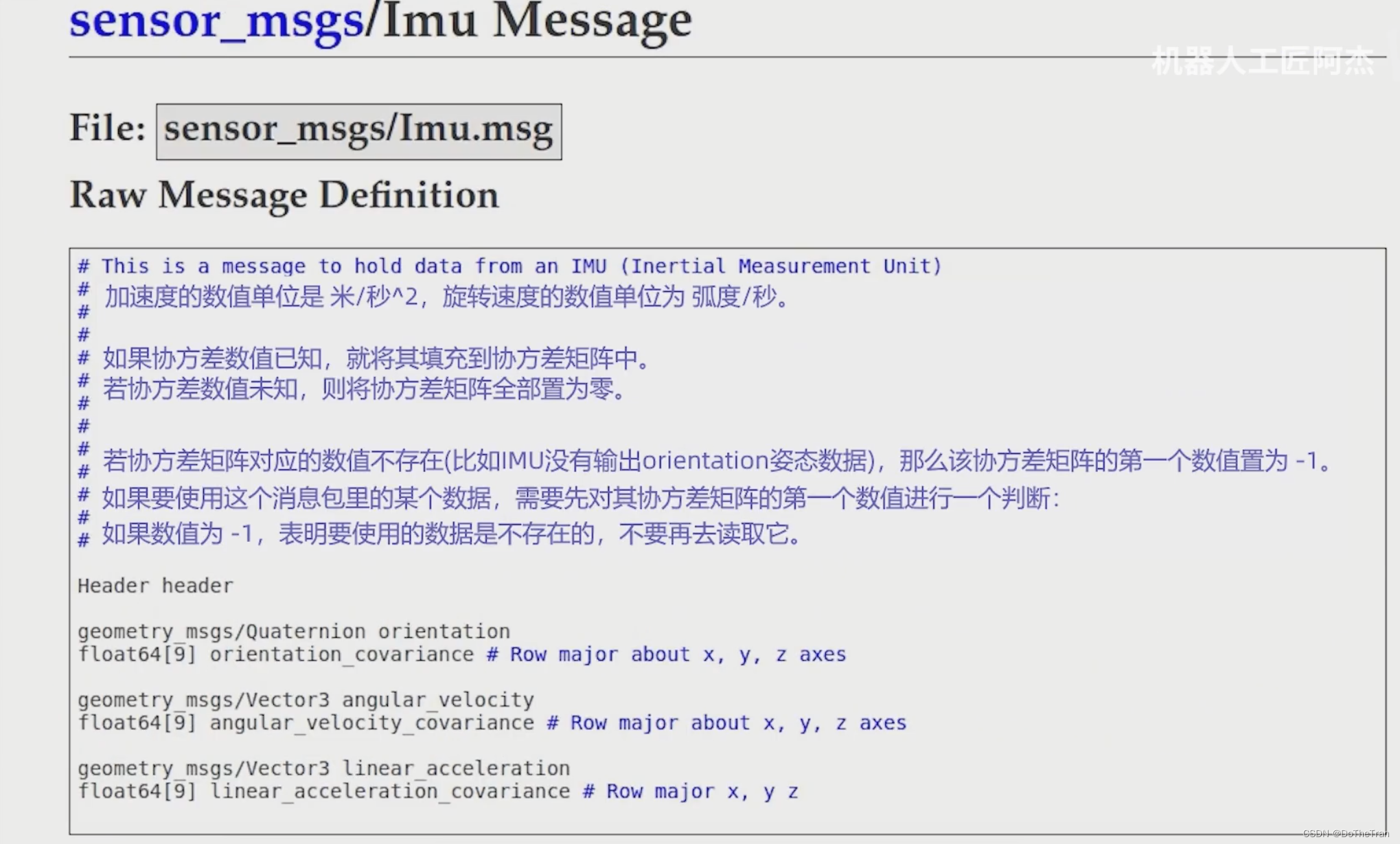 该消息是6轴传感器,如果使用磁强计,需要使用单独的消息:MagneticField
该消息是6轴传感器,如果使用磁强计,需要使用单独的消息:MagneticField
按照ROS 官方标准,一个IMU 可能包含三个话题:
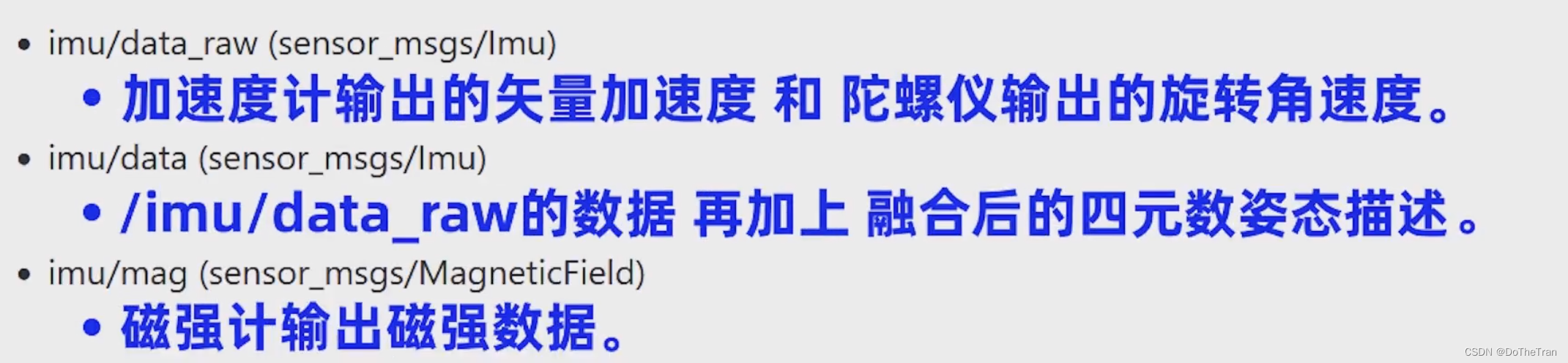 通常订阅的是第二个话题:imu/data, 直接获取imu融合好的姿态四元数
通常订阅的是第二个话题:imu/data, 直接获取imu融合好的姿态四元数
编写IMU航向锁定节点
catkin_create_pkg imu_pkg roscpp sensor_msgs
#include "ros/ros.h"
#include "sensor_msgs/Imu.h"
#include "tf/tf.h"
#include "geometry_msgs/Twist.h"
// 速度消息发布对象(全局变量)
ros::Publisher vel_pub;
// IMU 回调函数
void IMUCallback(const sensor_msgs::Imu msg)
{
// 检测消息包中四元数数据是否存在
if(msg.orientation_covariance[0] < 0)
return;
// 四元数转成欧拉角
tf::Quaternion quaternion(
msg.orientation.x,
msg.orientation.y,
msg.orientation.z,
msg.orientation.w
);
double roll, pitch, yaw;
tf::Matrix3x3(quaternion).getRPY(roll, pitch, yaw);
// 弧度换算成角度
roll = roll*180/M_PI;
pitch = pitch*180/M_PI;
yaw = yaw*180/M_PI;
ROS_INFO("滚转= %.0f 俯仰= %.0f 朝向= %.0f", roll, pitch, yaw);
// 速度消息包
geometry_msgs::Twist vel_cmd;
// 目标朝向角
double target_yaw = 90;
// 计算速度
double diff_angle = target_yaw - yaw;
vel_cmd.angular.z = diff_angle * 0.01;
vel_cmd.linear.x = 0.1;
vel_pub.publish(vel_cmd);
}
int main(int argc, char **argv)
{
setlocale(LC_ALL, "");
ros::init(argc,argv, "imu_node");
ros::NodeHandle n;
// 订阅 IMU 的数据话题
ros::Subscriber sub = n.subscribe("imu/data", 100, IMUCallback);
// 发布速度控制话题
vel_pub = n.advertise<geometry_msgs::Twist>("/cmd_vel",10);
ros::spin();
return 0;
}















 1168
1168











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









