






ros系统中,只能有一个根坐标系(假设为1)(即它没有父坐标系),其他所有坐标系都是与它有对应关系的坐标系。
根坐标系是一直固定不动的,根坐标系有一个子坐标系(假设为2),用tf发布坐标系1和坐标系2的位姿关系,ros保存起来;坐标系2有一个子坐标系(假设为3),tf发布坐标系2和坐标系3的位姿关系,ros保存起来。
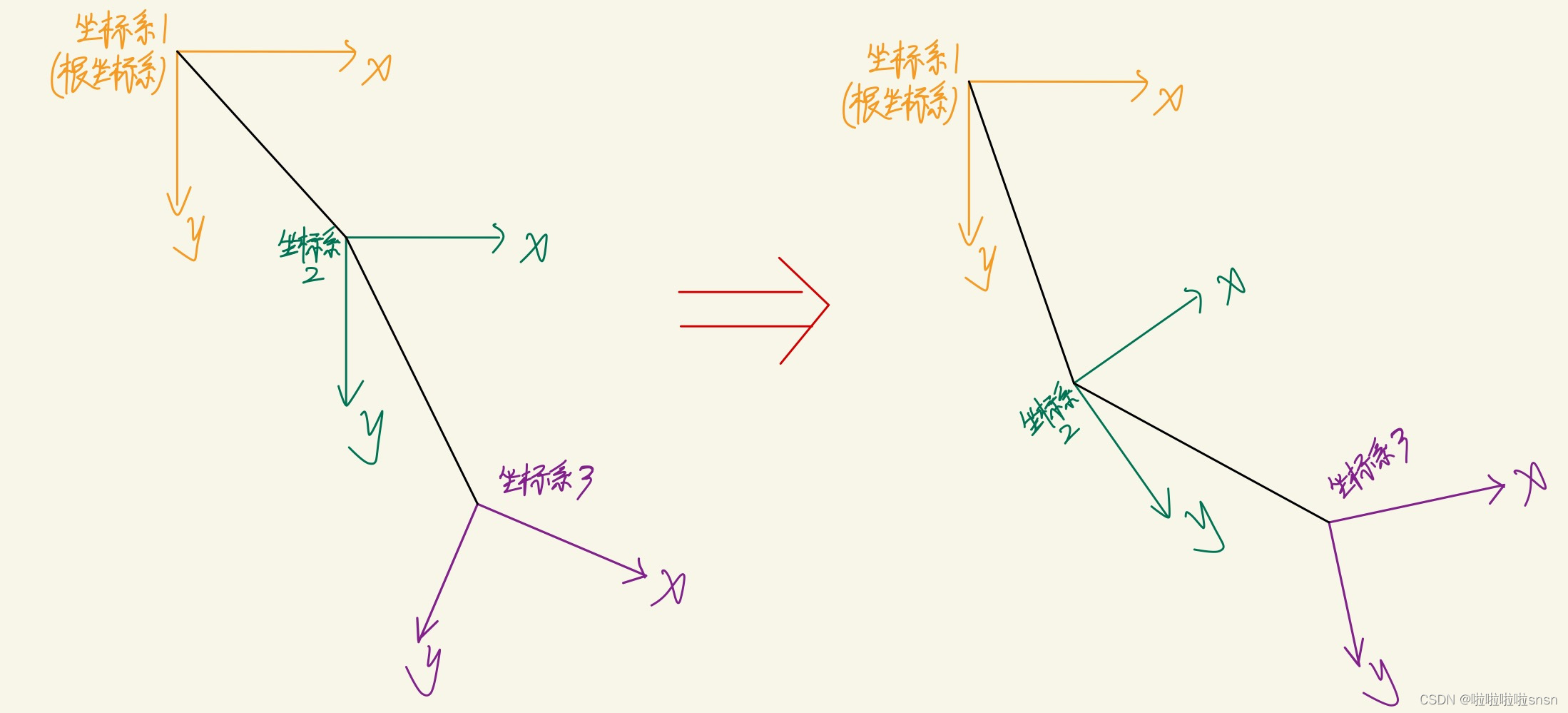
如果我此时改变了坐标系2相对于坐标系1的位姿, 那么,坐标系3对应于坐标系2的相对位姿没变,但是,坐标系3对于坐标系1的位姿也会改变的。
如下图示意:
父坐标系 和 子坐标系 是相对而说的,tf发布translation.x、translation.y、translation.z、rotation.x、rotation.y、rotation.z、rotation.w数据信息,这些数据信息的意思是: 固定住父坐标系不动,子坐标系在父坐标系下的位姿状态。
















 2497
2497











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









