







目录
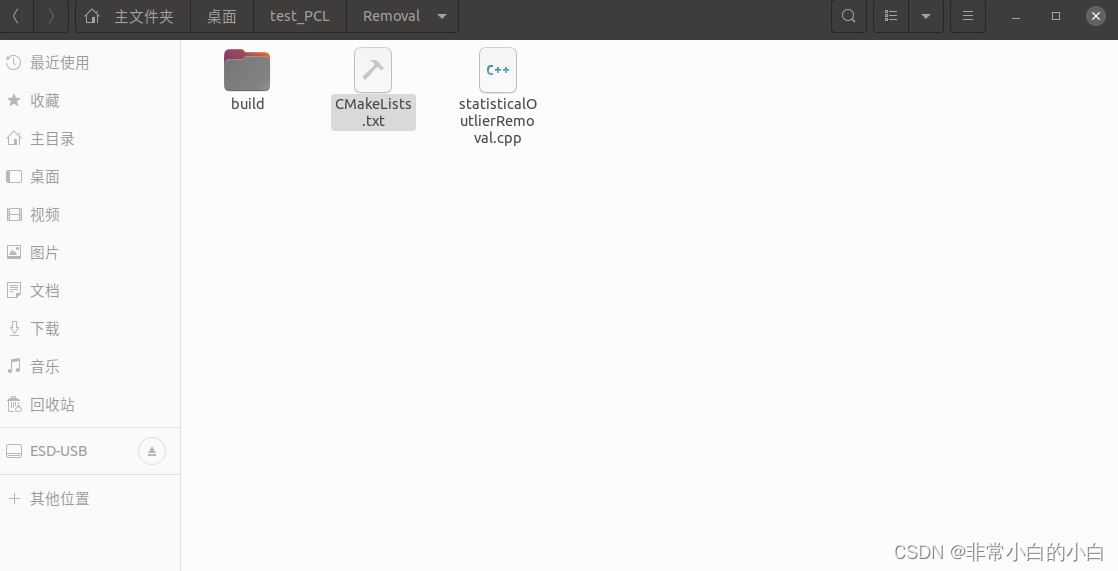
1.新建一个文件夹,把写好的statisticalOutlierRemoval.cpp 和 CMakeLists.txt 放在一起。
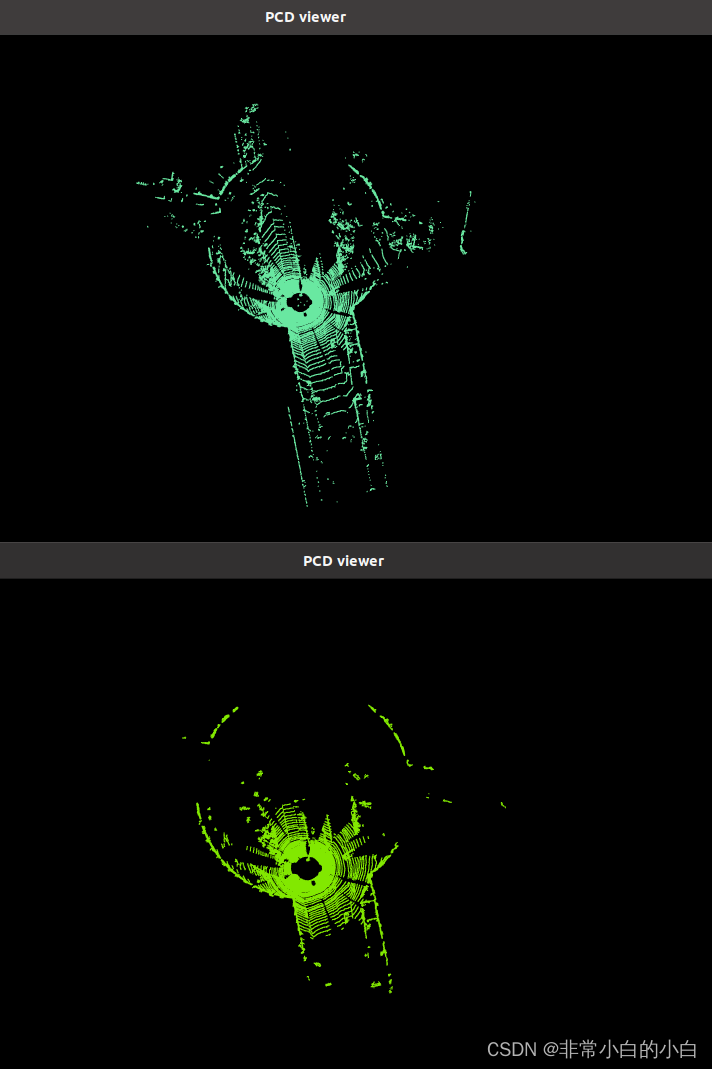
一、展示一下结果图:

二、实现过程
1.新建一个文件夹,把写好的statisticalOutlierRemoval.cpp 和 CMakeLists.txt 放在一起。
statisticalOutlierRemoval.cpp 代码如下:
#include <iostream>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/filters/statistical_outlier_removal.h> //统计滤波器头文件
//统计滤波器
int main(int argc, char **argv)
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_filtered(new pcl::PointCloud<pcl::PointXYZ>);
// 定义读取对象
pcl::PCDReader reader;
// 读取点云文件
reader.read<pcl::PointXYZ>(argv[1], *cloud);
std::cerr << "Cloud before filtering: " << std::endl;
std::cerr << *cloud << std::endl;
// 创建滤波器,对每个点分析的临近点的个数设置为50 ,并将标准差的倍数设置为1 这意味着如果一
//个点的距离超出了平均距离一个标准差以上,则该点被标记为离群点,并将它移除,存储起来
pcl::StatisticalOutlierRemoval<pcl::PointXYZ> sor; //创建滤波器对象
sor.setInputCloud(cloud); //设置待滤波的点云
sor.setMeanK(50); //设置在进行统计时考虑查询点临近点数
sor.setStddevMulThresh(1.0); //设置判断是否为离群点的阀值
sor.filter(*cloud_filtered); //存储
std::cerr << "Cloud after filtering: " << std::endl;
std::cerr << *cloud_filtered << std::endl;
//保存滤波后的点云
pcl::PCDWriter writer;
writer.write<pcl::PointXYZ>("after_filter.pcd", *cloud_filtered, false);
//sor.setNegative(true);
//sor.filter(*cloud_filtered);
//writer.write<pcl::PointXYZ>("1_outliers.pcd", *cloud_filtered, false);
return (0);
}
CMakeLists.txt 代码如下:
cmake_minimum_required( VERSION 2.8 )
PROJECT(statisticalOutlierRemoval)
set( CMAKE_BUILD_TYPE "Release" )
find_package(PCL 1.10 REQUIRED COMPONENTS)
include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})
add_executable(statisticalOutlierRemoval
statisticalOutlierRemoval.cpp
)
target_link_libraries(statisticalOutlierRemoval
${PCL_LIBRARIES}
)
过程图
如下(已经编译好的存在build ,未编译前没有build文件夹):
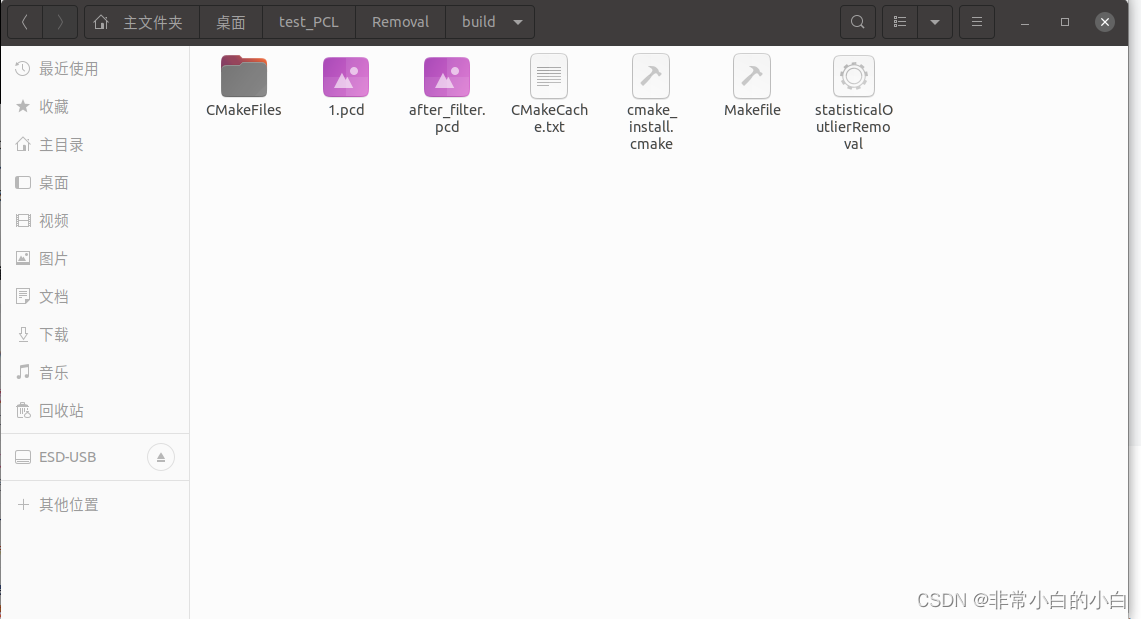
2.进行编译
在此文件夹(Removal)下打开终端,输入下列代码:
mkdir build
cd build
cmake …
make编译好后在build文件夹下打开终端执行文件:
./statisticalOutlierRemoval 1.pcd
如下(终端显示到有将近1W多个点被过滤掉了)

最后通过以下命令进行可视化
pcl_viewer 1.pcd
pcl_viewer after_filter.pcd可以在此路经下打开两个终端分别输入,最后对比两个结果图。


注: 点云图放在build文件夹下,如果是其他命名需要更改代码里图片命名。(after_filter.pcd为运行生成图)
学习来源:
-end-
















 1303
1303











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









