







【摘要】
现在汽车的电子电气架构逐步在更新,越来越多的ECU进行整合,从原来的分布式阶段逐步演进到域控制器和中央计算架构。在架构演进过程中,支撑这一变革的底层芯片也在逐步发展,越来越多的主机厂关注的是一整套的解决方案,而不是独立的芯片解决单独的区域。面向未来电子电气架构核心区域进行全场景布局的芯片厂商,将具备更明显的竞争优势。
一、主流OEM电子电气架构的演变进度
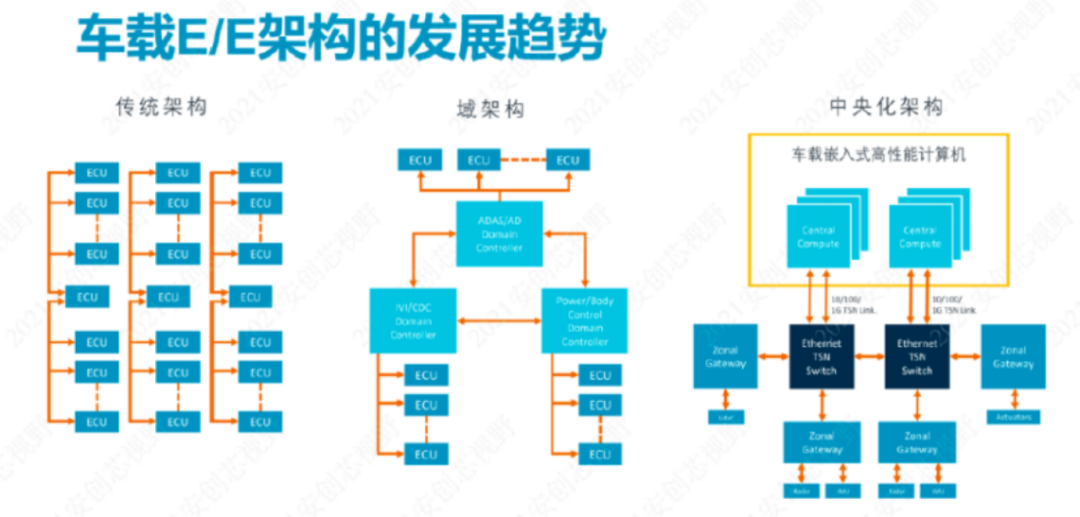
博世认为汽车电子电气架构演变路径为分布式、域集中、中央集中式。电子电气架构逐步成为汽车产品的一个核心技术,过去汽车上的控制器相互独立,软件为嵌入式,整车做最终的集成即可,随着分布式架构朝着域控制器,主机厂自己掌握中央控制系统,否则就会失去对汽车产品的控制权。
特斯拉Model3开启了电子架构的变化,实现了中央域控制架构的雏形,被行业认为在电子电气架构方面领先传统车企6年以上。大部分车企的跨域电子电气架构在2023年量产,比如今年量产的小鹏G9;一些传统车企电子架构仍处于功能域早期,呈现“分布式ECU+域控制器”的过渡形态,向“中央计算单元+区域控制器”将可能耗时3-10年。我们来看看主流的主机厂和tier1的电子电气架构发展进程。
1.1 大众的电子电气架构
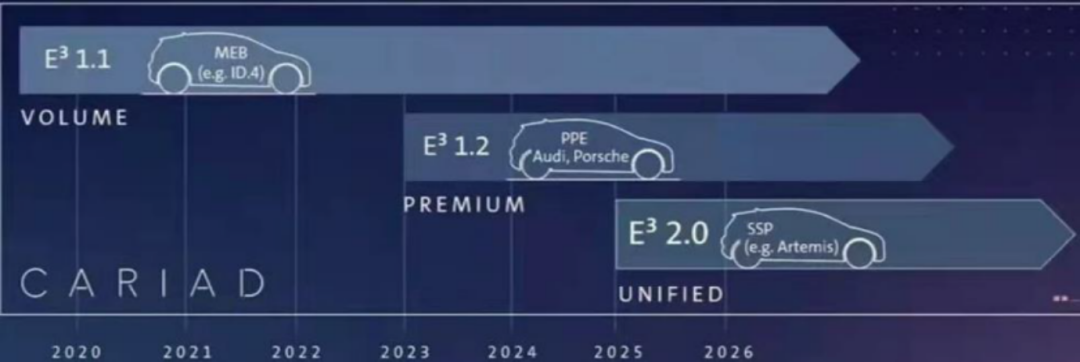
大众汽车MQB平台在2012年研发出来,到现在已经11年了,该平台售卖的车型超过3600W台,MQB平台的电子电气架构就是分布式,在平台升级为MEB的平台时,ID系列采用了E3架构。目前大众的ID系列的电子电气架构还处于E3 1.1版,在今年的PPE平台上搭载E3 1.2版本,从路径规划来看在2025年才能进化到E3 2.0版。
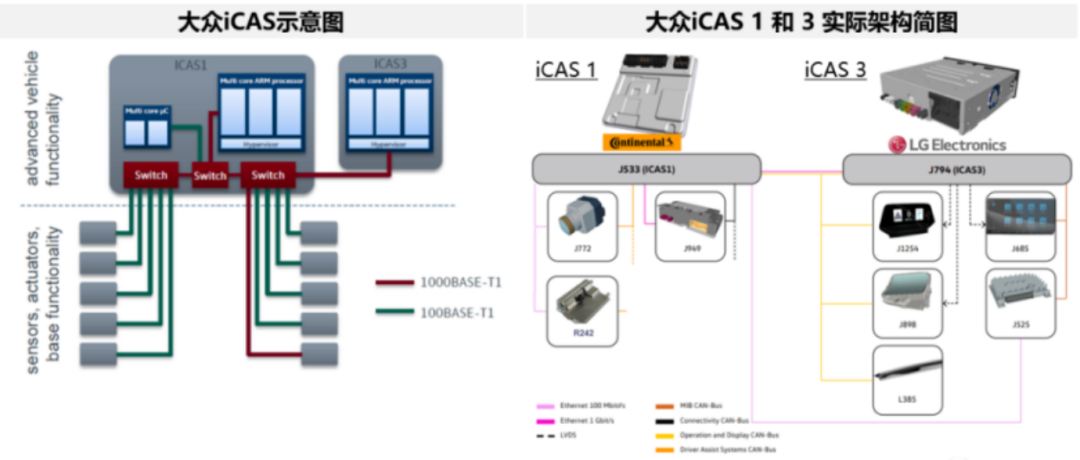
大众的MEB平台(首款车ID3)的E3架构
E3架构即由3个车辆应用服务器(ICAS,即In-Car Application )组成的新型集中式EE架构,具体包括:车辆控制服务器(ICAS1)、智能驾驶服务器(ICAS2)和智能座舱域(ICAS3);其中智能驾驶域ICAS2还在开发过程中,量产车型上搭载的依然是分布式架构方案。
综合来看,大众还是比较稳扎稳打,一步一步进行渐进式的架构推进,并没有直接采用中央式架构,由此看的出来大众是那种稳中求胜的选手。
1.2 小鹏的电子电气架构
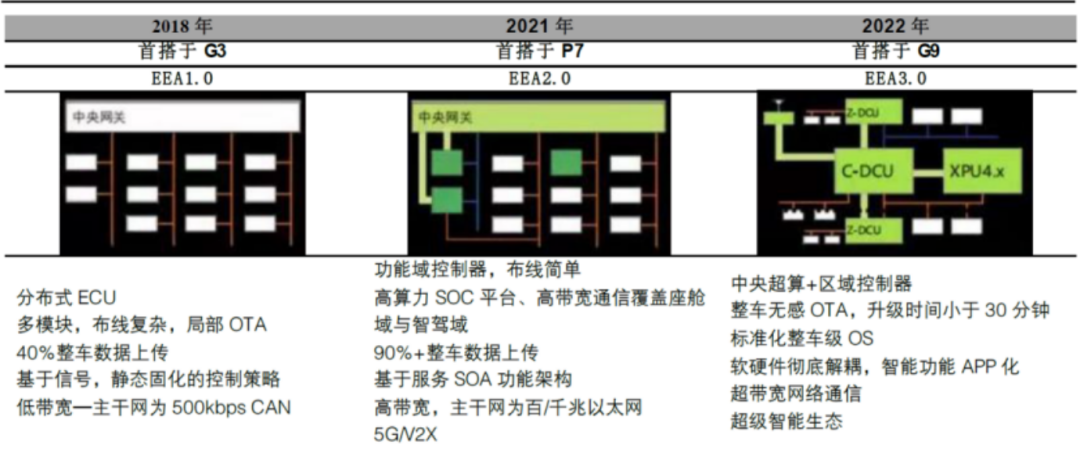
小鹏的电子电气架构最近这几年的演进非常不错,在G3采用的电子架构还是传统的架构时,在P7就升级为功能域控制器,而且该电子电气架构在那个时间节点都是非常领先的。
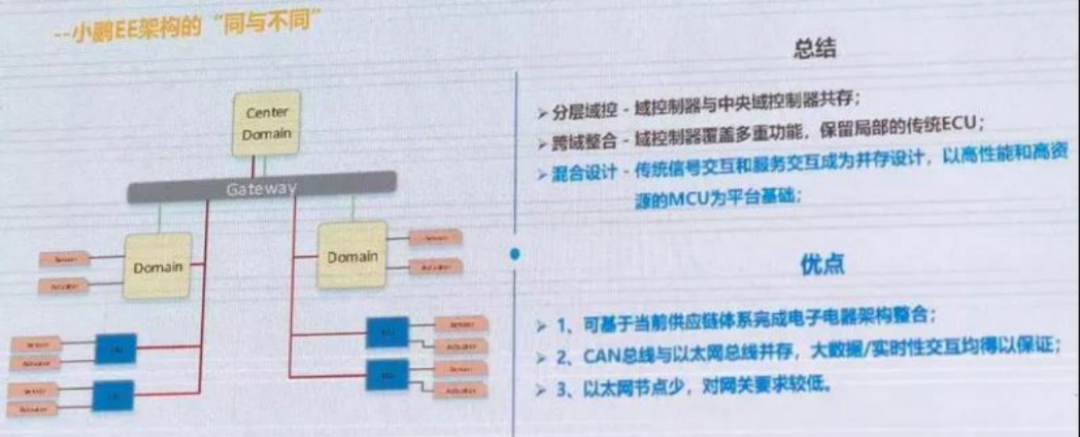
小鹏P7的搭载的第二代电子电气架构, ECU数量减少了60%,分层域控,也就是功能域控制器和中央域控制器并存,域控制器覆盖多重功能,保留了局部传统的ECU。大部分车身功能迁移到域控制器,中央处理器可以实现仪表、中控导航和智能车身控制的大部分功能,而且集成中央网。
在刚刚量产的G9车型中,小鹏的电子电气架构已经迭代到X-EEA 3.0版本了,成为首款可以支持 XPILOT 4.0的智能辅助驾驶系统的量产车。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 53
53

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









