







文章目录
前言
基于Cartographer的安装过程比较简单,基本就是ubuntu18.04,ros-melodic,cartographer,cartographer-ros。本文主要针对国内上网不便的情况,给出快速安装的过程说明。
1. 环境要求
- Ubuntu 18.04 desktop
- ROS Melodic
- cartographer
- Ubuntu系统:64bit-18.04+
- gcc版本:6.3.0、7.5.0、9.3.0
- proto版本:3.0+
- ceres-solver版本:1.12.0、1.13.0
2. 安装ROS Melodic
2.1 配置国内源
sudo sh -c 'echo "deb https://mirrors.ustc.edu.cn/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
2.2 安装
sudo apt update
sudo apt install ros-melodic-desktop-full
2.3 安装rosdep并设置国内源
2.3.1 安装rosdep
sudo apt-get -y install python-rosdep
2.3.2 设置成本地源
为了把rosdep的依赖设置成本地,需要修改多个文件,具体如下。
2.3.2.1 20-default.list
cd ~/
git clone https://gitee.com/c1h2/rosdistro.git
cd /home/h1c/rosdistro/rosdep/sources.list.d/
将20-default.list的所有内容替换为:
# os-specific listings first
yaml file:///home/h1c/rosdistro/rosdep/osx-homebrew.yaml osx
# generic
yaml file:///home/<home_folder>/rosdistro/rosdep/base.yaml
yaml file:///home/<home_folder>/rosdistro/rosdep/python.yaml
yaml file:///home/<home_folder>/rosdistro/rosdep/ruby.yaml
gbpdistro file:///home/<home_folder>/rosdistro/releases/fuerte.yaml fuerte
# newer distributions (Groovy, Hydro, ...) must not be listed anymore, they are being fetched from the rosdistro index.yaml instead
2.3.2.2 /usr/lib/python2.7/dist-packages/rosdep2/gbpdistro_support.py
替换文件中的对应内容为:
FUERTE_GBPDISTRO_URL = 'file:///home/<home_folder>/rosdistro/releases/fuerte.yaml'
2.3.2.3 /usr/lib/python2.7/dist-packages/rosdep2/rep3.py
替换文件中的对应内容为:
REP3_TARGETS_URL = 'file:///home/<home_folder>/rosdistro/releases/targets.yaml'
2.3.2.4 /usr/lib/python2.7/dist-packages/rosdistro/__init__.py
替换文件中的对应内容为:
DEFAULT_INDEX_URL = 'file:///home/<home_folder>/rosdistro/index-v4.yaml'
2.3.2.5 /usr/lib/python2.7/dist-packages/rosdep2/sources_list.py
替换文件中的对应内容为:
DEFAULT_SOURCES_LIST_URL = 'file:///home/<home_folder>/rosdistro/rosdep/sources_list.d/20-default.list'
2.3.3 更新rosdep源
sudo rosdep init
rosdep update
2.4 安装编译依赖
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential
2.5 验证安装
rosversion -d
3. 安装Cartographer
3.1 ROS下的直接安装
sudo apt-get update
sudo apt-get install ros-melodic-cartographer*
3.2 源码安装
3.2.1 检查环境要求
运行如下命令确认protoc版本是3.0以上。
protoc --version
3.2.2 安装依赖与编译工具
sudo apt-get update
sudo apt-get install -y \
clang \
cmake \
g++ \
git \
google-mock \
libboost-all-dev \
libcairo2-dev \
libcurl4-openssl-dev \
libeigen3-dev \
libgflags-dev \
libgoogle-glog-dev \
liblua5.2-dev \
libsuitesparse-dev \
lsb-release \
ninja-build \
stow
3.2.3 初始化工作空间
需要从源码安装如下包:
- cartographer:cartographer包
- cartographer_ros:cartographer的ros wrapper
- ceres-solver:cartographer使用的优化器
3.2.3.1 方法1:使用wstool
- 使用wstool初始化工作空间
mkdir -p ~/carto_ws
cd ~/carto_ws
wstool init src
#wstool merge -t src https://raw.githubusercontent.com/cartographer-project/cartographer_ros/master/cartographer_ros.rosinstall
- 修改~/carto_ws/src/.rosinstall文件,加入cartographer、cartographer_ros、ceres-solver的功能包,在文件末尾添加如下内容:
- git:
local-name: cartographer
uri: https://github.com/cartographer-project/cartographer.git
version: master
- git:
local-name: cartographer_ros
uri: https://github.com/cartographer-project/cartographer_ros.git
version: master
- git:
local-name: ceres-solver
uri: https://github.com/ceres-solver/ceres-solver.git
version: 1.13.0
- 更新依赖。
wstool update -t src
3.2.3.2 方法2:直接git获取源码
cd ~/carto_ws/src
git clone https://github.com/cartographer-project/cartographer.git
git clone https://github.com/cartographer-project/cartographer_ros.git
git clone https://github.com/ceres-solver/ceres-solver.git
3.2.4 安装功能包依赖
- 打开文件~/carto_ws/src/cartographer/package.xml,删除行“<depend>libabsl-dev</depend>”
- 安装abseil-cpp库:
cd ~/carto_ws/src/cartographer/scripts
./install_abseil.sh
- 安装依赖
rosdep install --from-paths src --ignore-src --rosdistro=${ROS_DISTRO} -y
3.2.5 编译安装
catkin_make_isolated --install --use-ninja
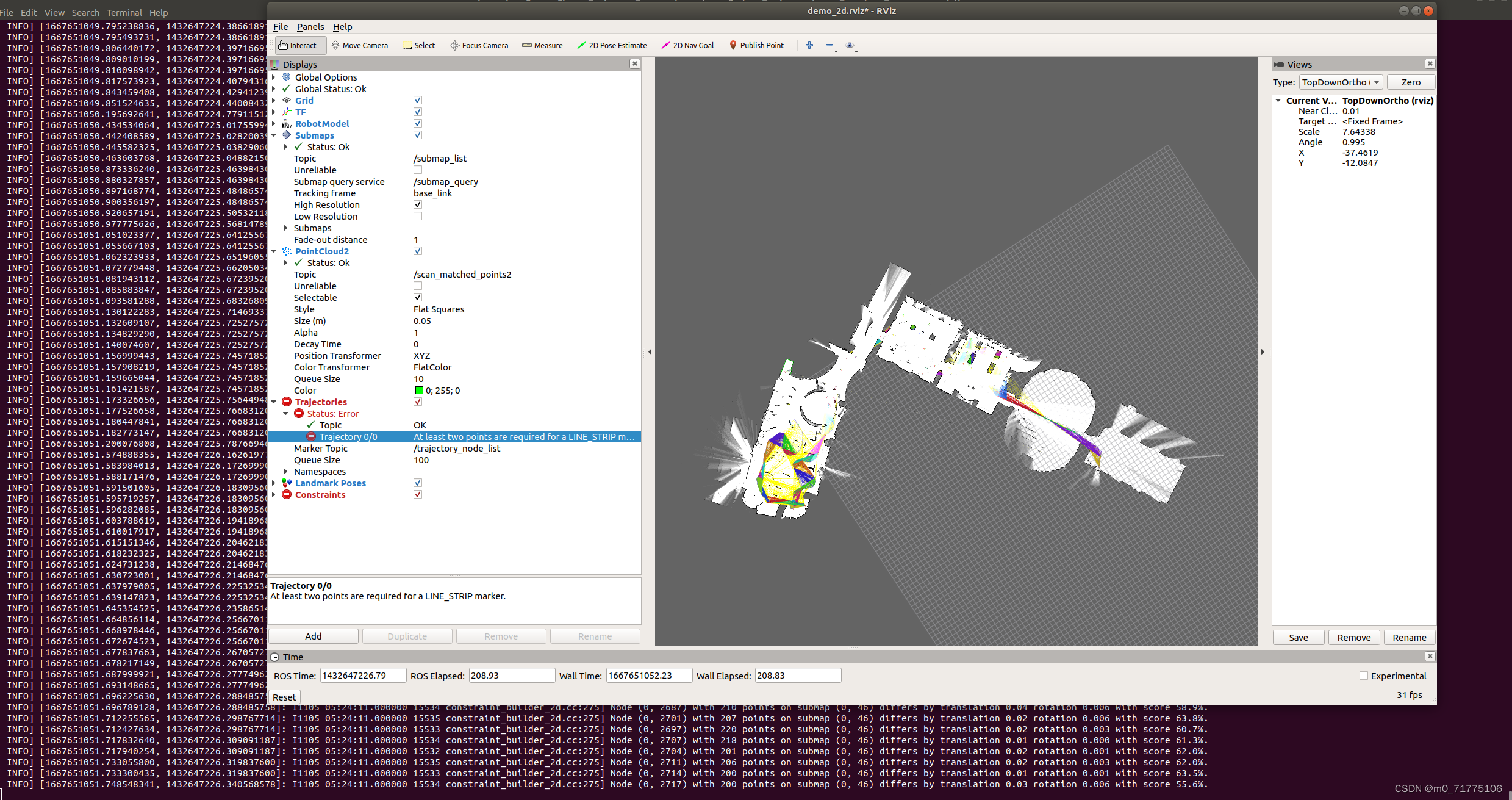
4. 测试安装
- 下载测试包:
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/backpack_2d/cartographer_paper_deutsches_museum.bag
- 运行:
cd ~/carto_ws
source install_isolated/setup.bash
roslaunch cartographer_ros demo_backpack_2d.launch bag_filename:=${HOME}/Downloads/cartographer_paper_deutsches_museum.bag
参考文献
- ROS Melodic安装教程,https://blog.csdn.net/qq_35395195/article/details/122114402
- 【杂记1】PC-Ubuntu18.04.5+ROS-melodic环境下安装cartographer功能包,https://blog.csdn.net/weixin_46135347/article/details/122748871















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









