






一、ROS安装
ROS的官方安装步骤:
1、noetic / Ubuntu 20.04 :
http://wiki.ros.org/noetic/Installation/Ubuntu
2、melodic / Ubuntu 18.04:
http://wiki.ros.org/melodic/Installation/Ubuntu
3、kinetic / Ubuntu 16.04:
http://wiki.ros.org/kinetic/Installation/Ubuntu
一键安装:鱼香ROS提供了一个全面且方便的脚本,可以直接运行来安装系统对应版本的ROS
wget http://fishros.com/install -O fishros && . fishros

20.04是按装noetic LTS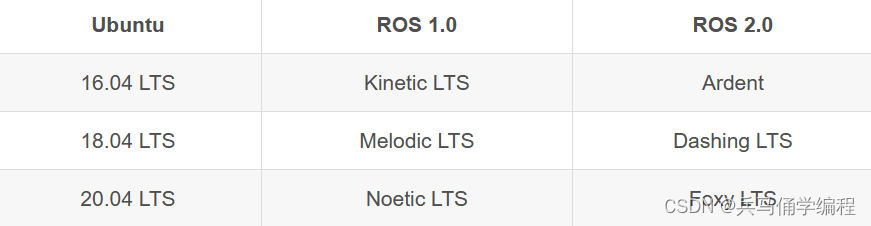
安装完用小乌龟测试一下
打开第一个终端
roscore 打开第二个终端
rosrun turtlesim turtlesim_node打开第三个终端
rosrun turtlesim turtle_teleop_key键盘 ↑ ↓ ← → 移动小海龟

ok,安装成功ROS;
二、摄像头的安装的步骤
先进行安装
sudo apt-get install ros-noetic-usb-cam你可以进入计算机的opt文件里面的ROS/share可以找到usb安装位置
开启摄像头;
roslaunch usb_cam usb_cam-test.launch注意:打开连接这的可移动设备,然后还要在虚拟机设置里面选择3.1usb


三、安装opencv
sudo apt-get install ros-noetic-vision-opencv libopencv-dev python3-opencvOK,安装成功;
















 4262
4262

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











