







复现FAST_LIVO2【Ubuntu 20.04.6 LTS】_fast-livo2复现-CSDN博客
根据这个教程进行复现,根据要求安装好对应版本的依赖、下载好文件以及数据集,在这个过程记录一下跟我一样会踩到的坑。。。
Sophus安装问题
①下载问题
git clone https://github.com/strasdat/Sophus.git
cd Sophus
git checkout a621ff
mkdir build && cd build && cmake ..
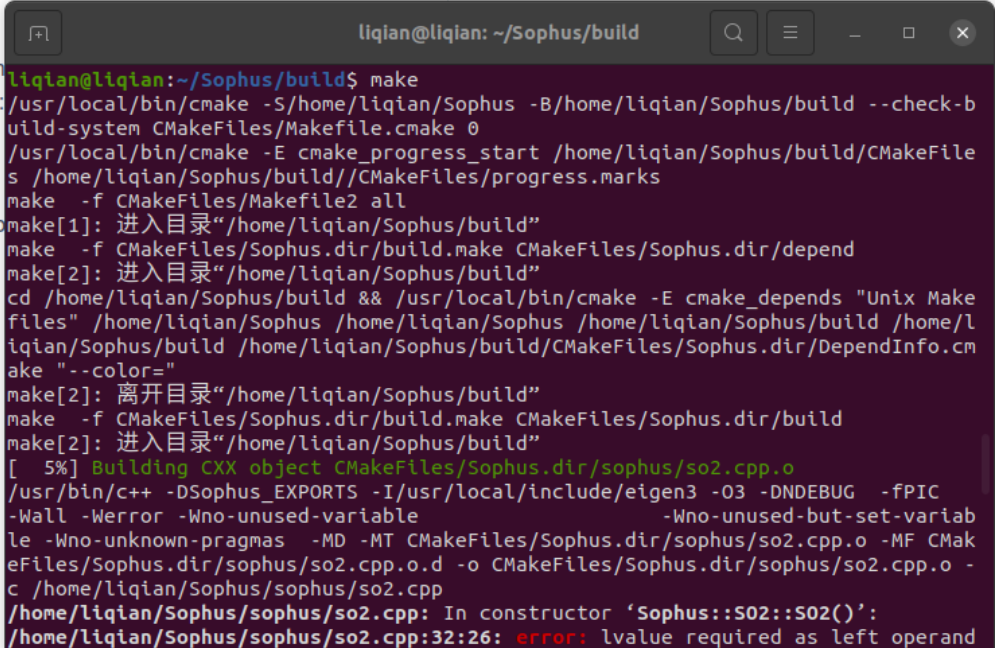
make
sudo make install在下载Sophus时:按照上面指令进行安装时:
在这里出现了error!
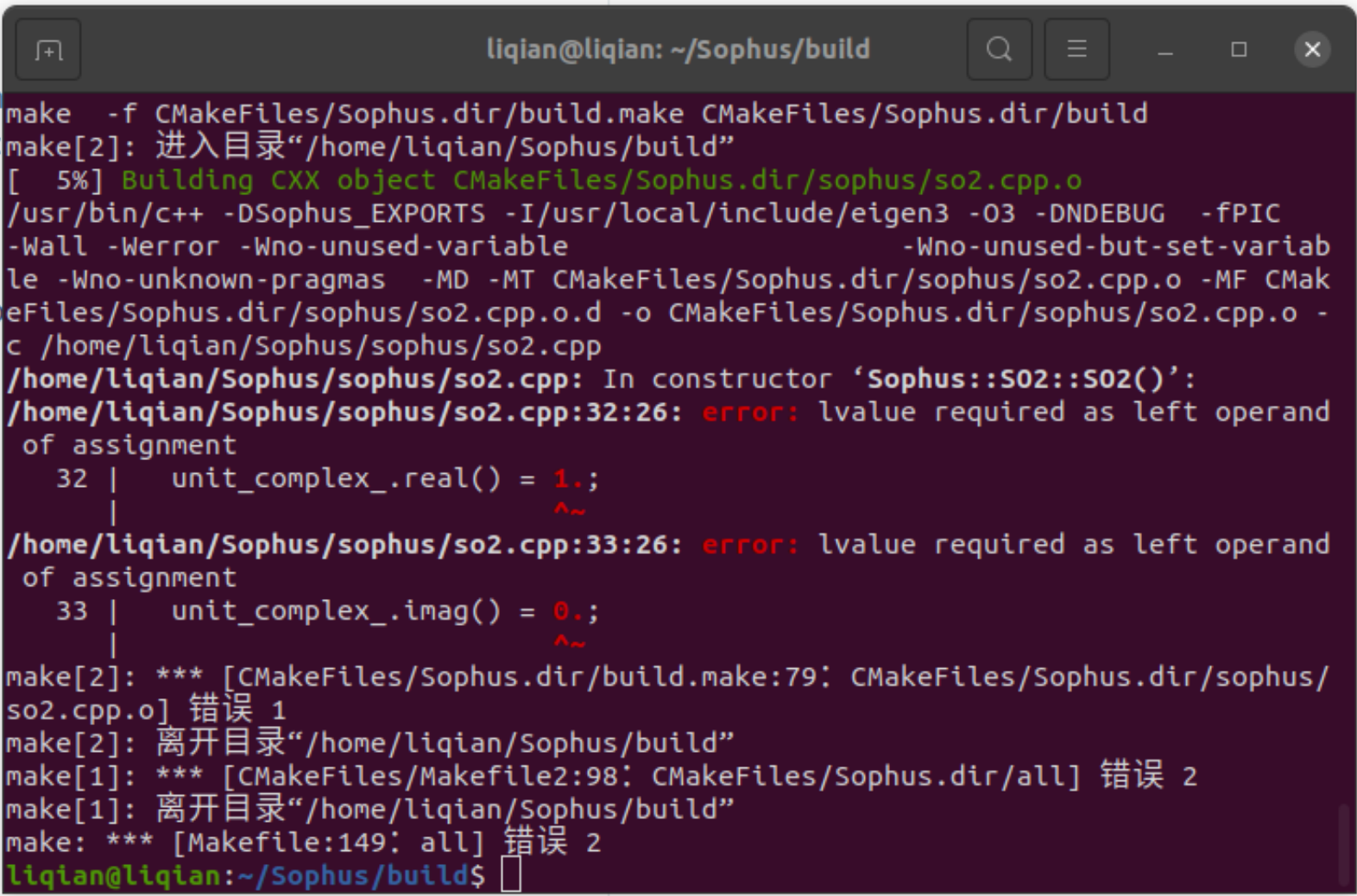
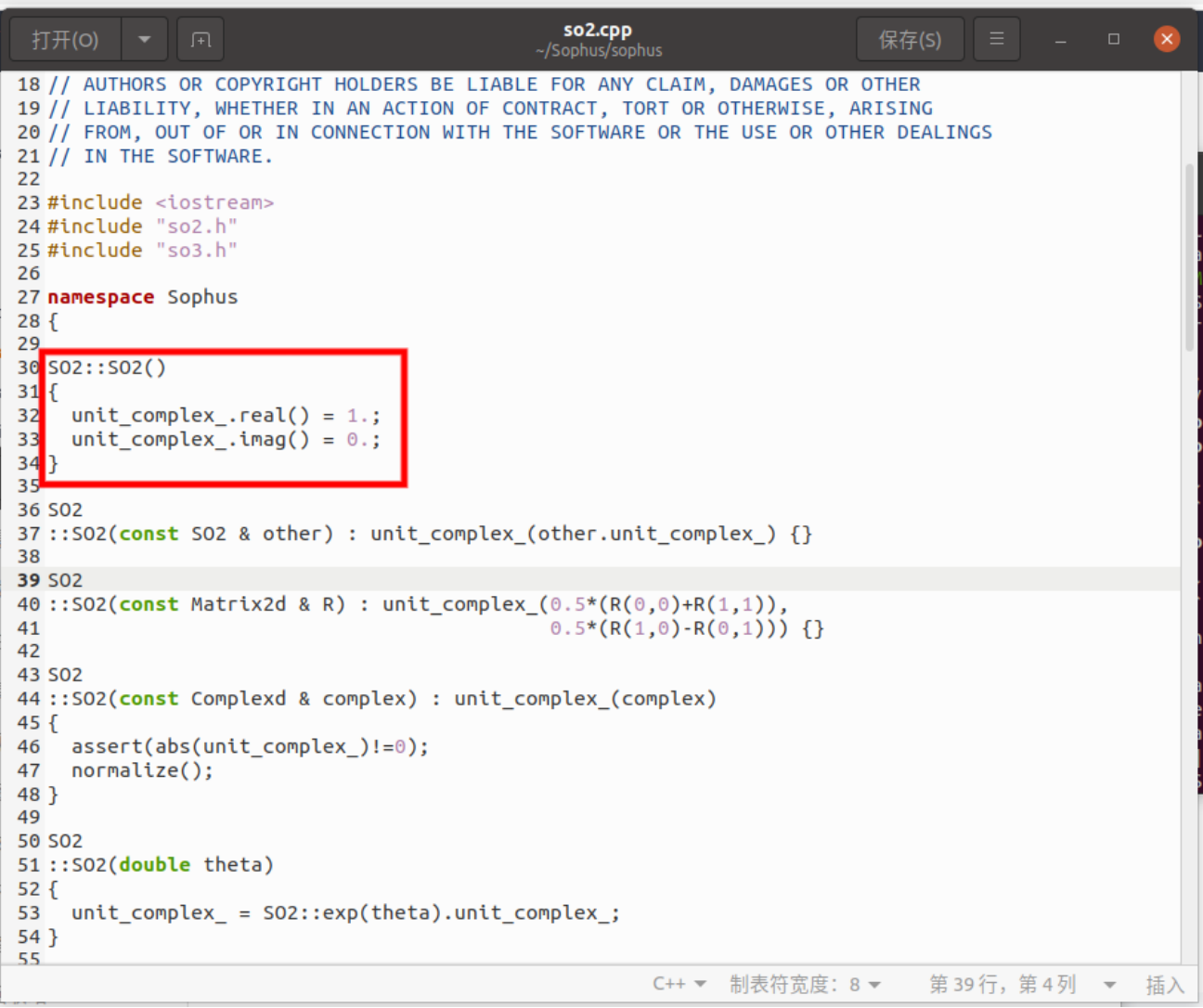
解决办法:打开Sophus下sophus的so2.cpp文件,将下面红框进行修改为:
| SO2::SO2() { unit_complex_.real(1.); unit_complex_.imag(0.); } |
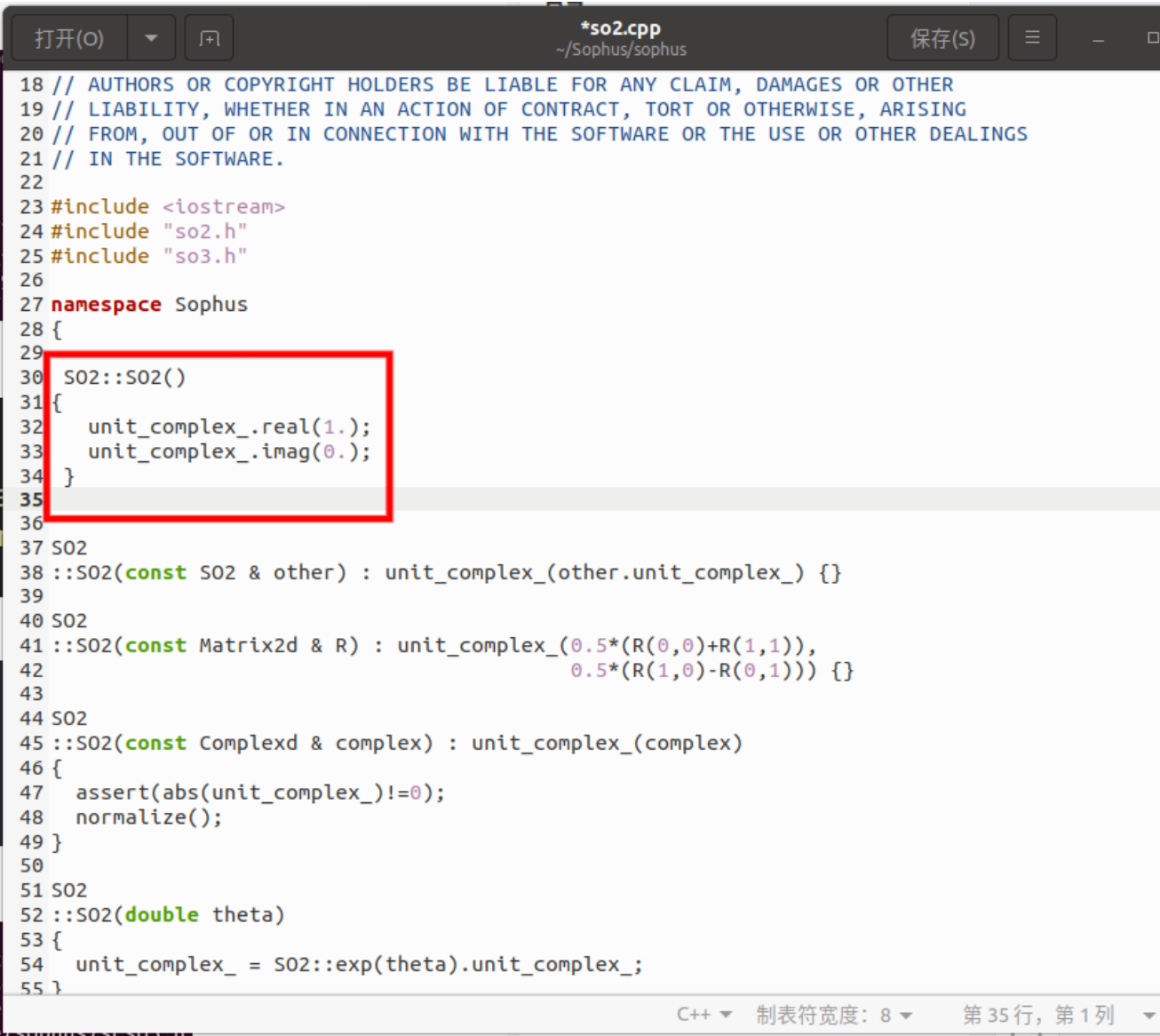
重新make:
再进行sudo make install:
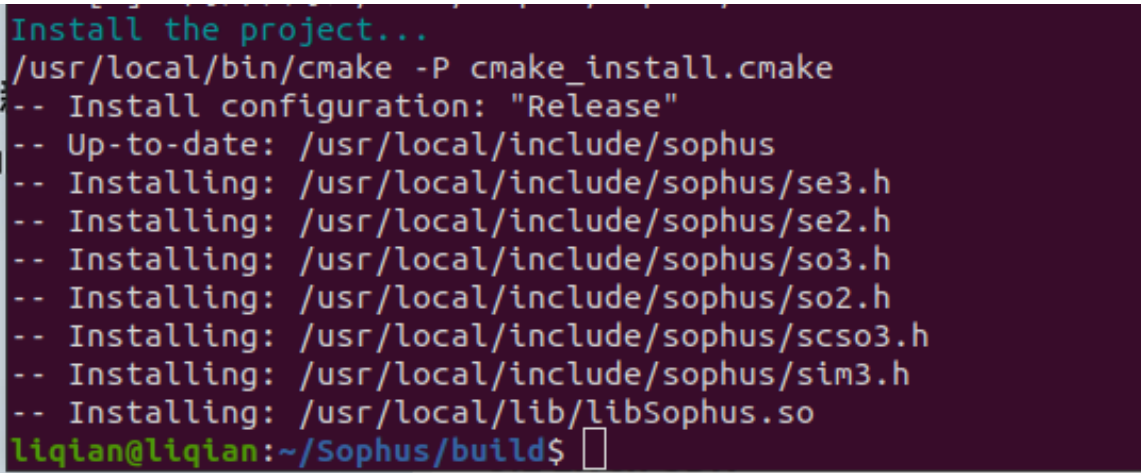
安装成功!
②编译路径问题
在复现fast_lio2时,catkin_make时出现:
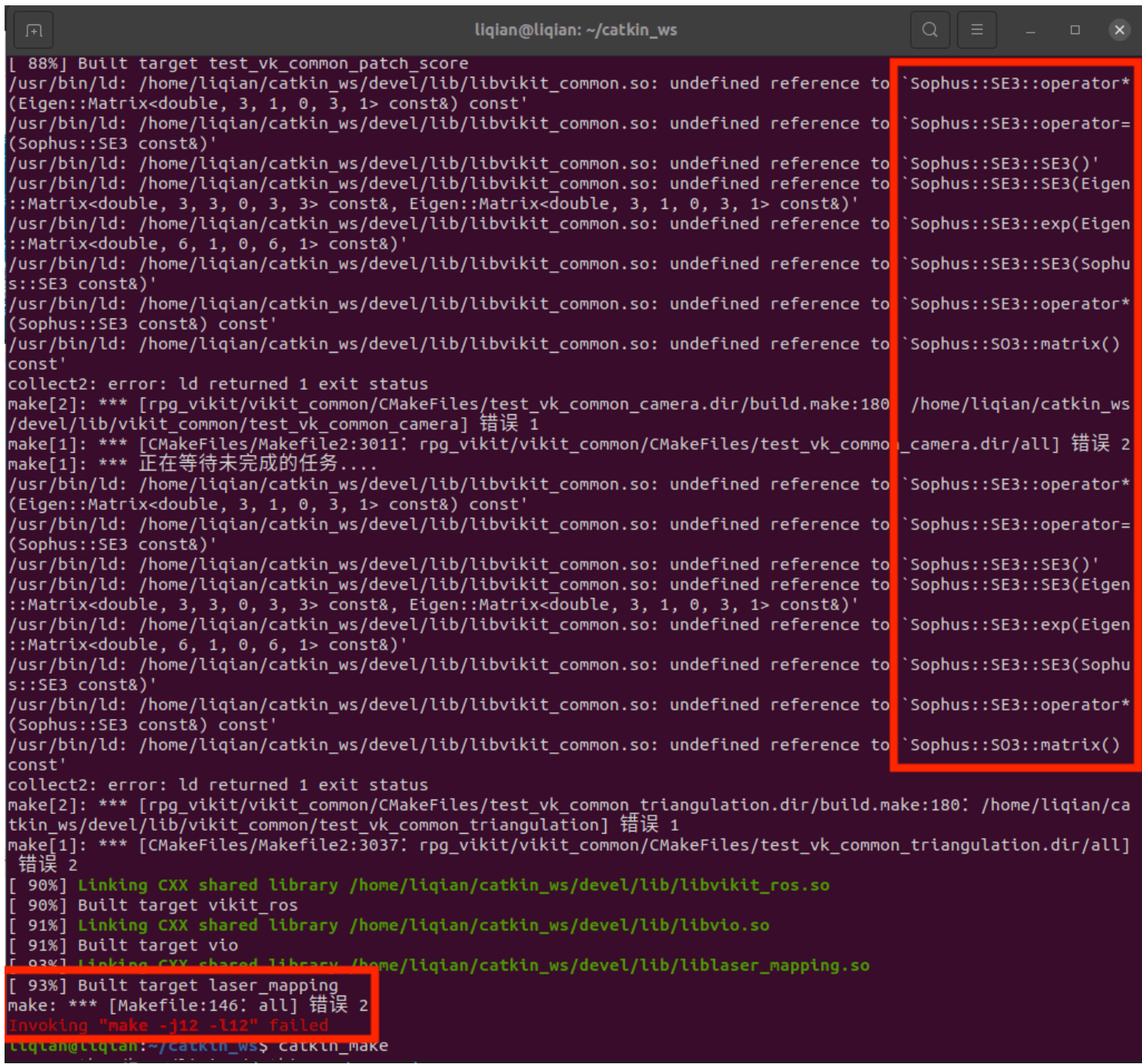
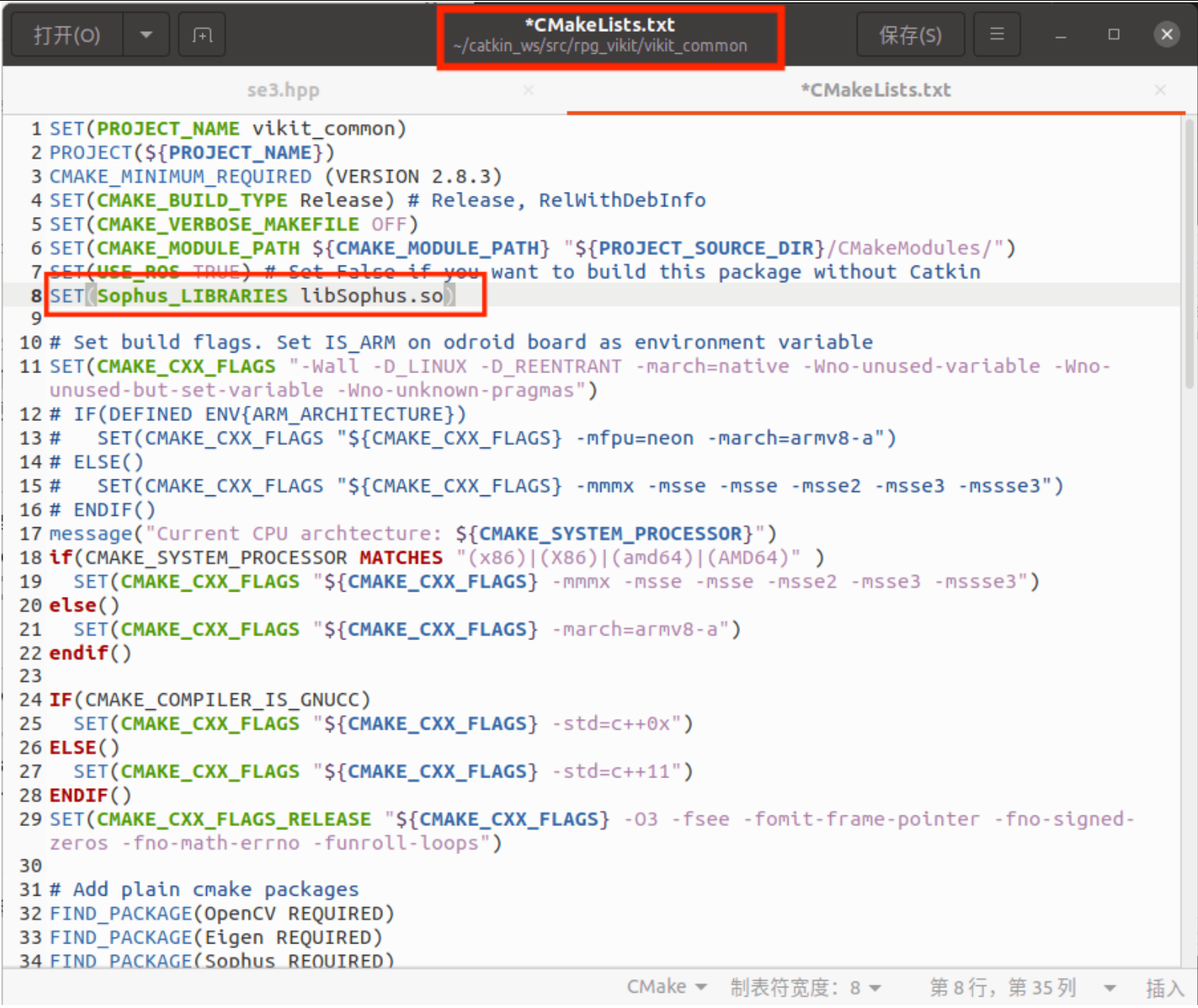
找不到SE3头文件,这种情况下先检查Sophus的头文件、库文件、Cmake文件是否存在在且为正确的路径。查找之后路径都是正确的且是正常下载的,于是考虑cmakeList文件是否正确链接到了Sophus库文件,于是检查,发现在rpg_vikit/vikit_common的CmakeLists.txt里没有正确链接Sophus。于是在其添加SET(Sophus_LIBRARIES libSophus.so):
再次catkin_make:
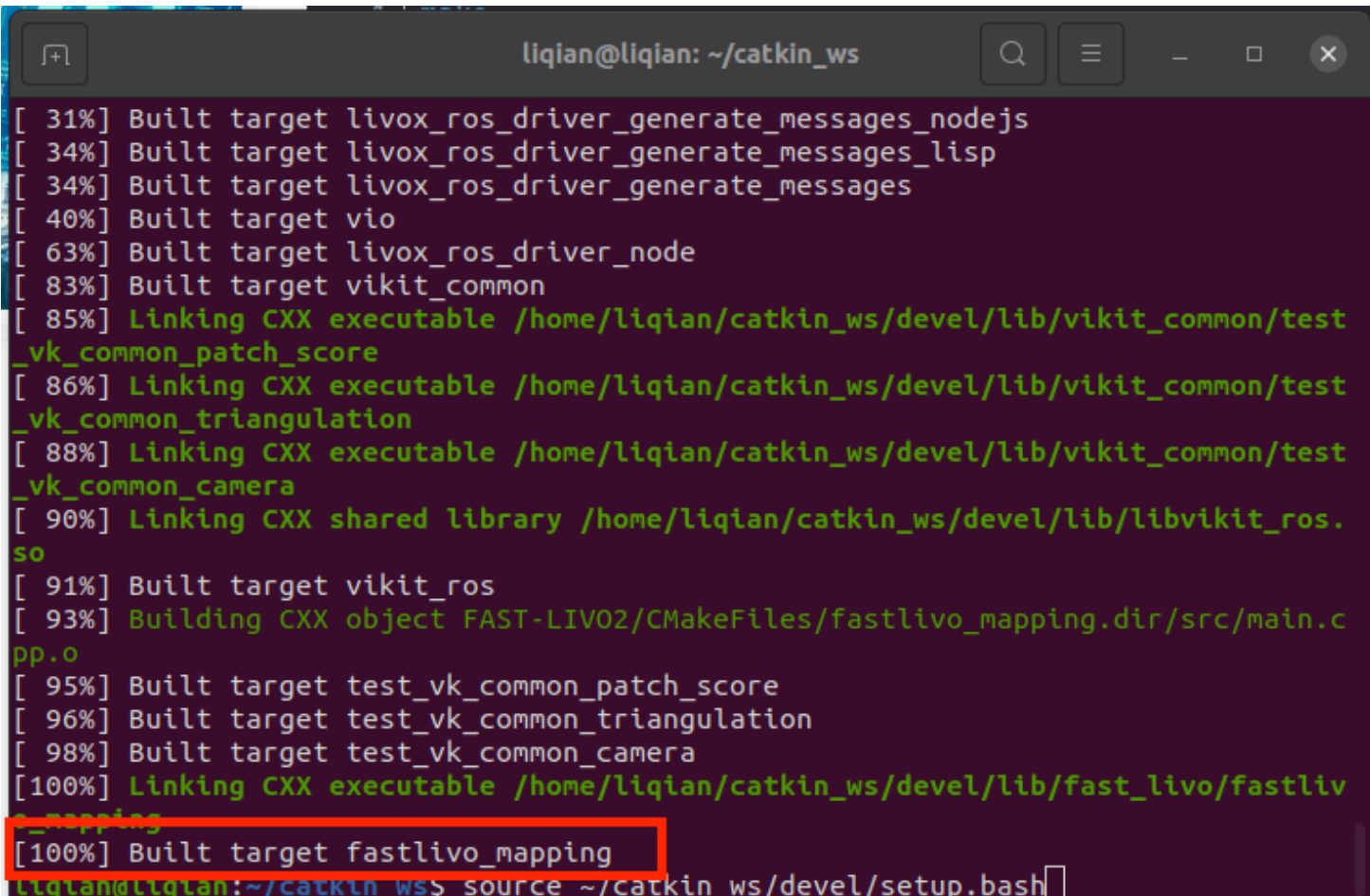
这里catkin_make成功!
下一步加载 ROS 工作空间的环境配置。它会执行 ~/catkin_ws/devel/setup.bash 脚本,该脚本会设置环境变量和路径,使得 ROS 能够识别并使用当前工作空间中的包:

成功!

















 3861
3861

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









