




主讲人:万国伟 百度自动驾驶事业部研发工程师
1.技术入门
无人车自定位系统
相对一个坐标系,确定无人车的位置和姿态。
位置:3个自由度,x、y、z
姿态:3个自由度,三个方向的旋转:横滚(roll)、俯仰(pitch)、航向(yaw)
自动驾驶汽车定位系统指标要求
| 项目 | 指标 | 理想值 |
|---|---|---|
| 精度 | 误差均值 | <10cm |
| 鲁棒性 | 最大误差 | <30cm |
| 场景 | 覆盖场景 | 全天候 |
为什么无人车需要精确定位系统?
与自动驾驶地图配合提供静态环境感知
定位系统提供速度、角速度、加速度等信息,用于路线规划和车辆控制
定位方法
- 基于电子信号定位:GNSS
航迹推算:IMU
环境特征匹配:LiDAR、camera
-
卫星实时动态差分技术包括位置差分和距离差分
距离差分又包括伪距差分、载波相位差分
(1) 伪距差分:利用多个卫星发射信号到基站、接收站,可以得到一组有误差的距离值,差分消除误差,再传递给移动站,精度:米级
(2) 载波相位差分:全球、全天候、全天时;高精度;实时;精度:cm级,小于5cm
(3)缺点:
(i)需要基站传递误差,基站布置成本高
(ii)强依赖可视卫星数
(iii)易受电磁环境干扰
(iv)GNSS信号遮挡引起多径效应 -
环境特征匹配
激光定位:实时激光点云与预先建立的地图匹配
视觉定位:视觉车道线地图与在线车道线检测匹配 -
惯性导航
(1) IMU包括加速度计(瞬时加速度)+陀螺仪(瞬时角速度),需要剔除重力加速度
(2) 消费级IMU:精度低、价格便宜;光纤IMU:精度高、价格昂贵
(3) 工作过程:
(i)通过角速度积分得到姿态增量,与前一个姿态加和得到当前姿态
(ii)加速度积分得到速度
(iii)二者结合可以得到位置信息
(4) 优点:六自由度信息;短时精度高;输出频率高200HZ以上、无延迟;无外部依赖输入
(5) 缺点:误差随时间累积 -
多传感器融合定位(GNSS,激光定位,视觉定位,惯性导航)
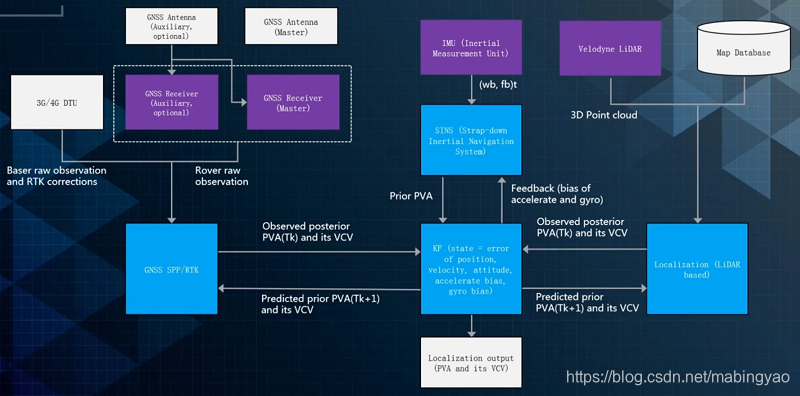
核心模块KF:状态误差的卡尔曼滤波器,接收惯性导航的递推作为时间更新,保证滤波器能够有高频输出。
接收GPS、激光点云定位和视觉定位,得到位置和姿态的更新,做低频的状态的更新。
2.相关基础知识
2.1 三维几何变换
坐标系:根据各个轴位置关系的不同,空间中的坐标系分为左手坐标系和右手坐标系(常用)
-
二维旋转:
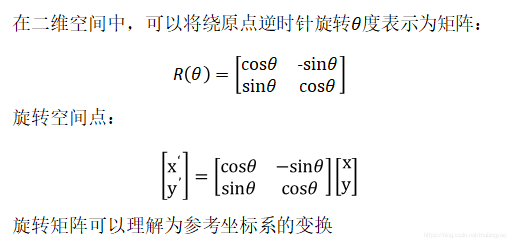
-
三维旋转:
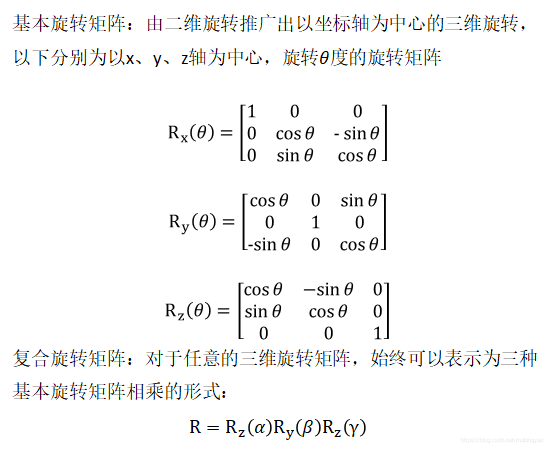
存在的问题:旋转矩阵内的参数远大于旋转的自由度
优化:欧拉角、四元数 -
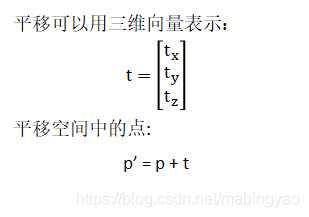
三维平移
2.2 刚体的位置与朝向(认为车是一个刚体)
(1)刚体坐标系:为确定刚体的位置和朝向,需要在刚体内取一点P为原点建立刚体坐标系
(2)刚体位置和朝向:刚体的位置和朝向可以看作刚体原点P相对参考坐标系原点O所做的平移,可以使用三维平移向量表示
2.3 常用的坐标系:
| 坐标系 | 简述 | 特点 | 图示 | 例子 |
|---|---|---|---|---|
| 地心惯性坐标系—i系(ECI) | 原点:地球原点;Z轴:沿地轴方向指向北极;X轴、Y轴:位于赤道平面内,与Z轴满足右手法则,并且分别指向两个恒星 | X、Y轴指向两颗恒星;不随地球自转而转动;可以作为地球附近传感器输出的惯性坐标系 |  红色坐标系 红色坐标系 | 在研究载体在地球表面附近的运动时,近似看作关性坐标系,如IMU |
| 地心地固坐标系—e系(ECEF) | 原点:地球原点;Z轴:沿地轴方向指向北极;X轴:赤道平面与格林威治子午面的交线上;Y轴:在赤道平面,与X轴、Z轴满足右手法则 | 与地球固定在一起,随地球旋转;假如起始时刻i系与e系重合,二者旋转关系只与时间相关。旋转图示角度,i系与e系重合;地球表面的任意一点可以使用确定的坐标系(x,y,z)表示 |  绿色坐标系 绿色坐标系 | 常用的如WGS84坐标系系统 |
| 当地水平坐标系—l系 | 原点:载体所在的地球表面;X、Y轴在当地水平面内分别指向东和北,Z轴垂直向上,与X、Y轴满足右手法则 | 与地球固连在一起,随地球转动;与e系的旋转关系只与载体所在精度、纬度有关 |  蓝色坐标系 蓝色坐标系 | 机器人领域的世界坐标系(w系);导航坐标系(n系);“东-北-天(E-N-U)”坐标系 |
| 通用横轴墨卡托投影(UTM投影) | “等角横轴割圆投影” :椭圆柱割地球于南纬80度、北纬84度两条等高圈,投影后两条相割的经线上没有变形,而中央经线上长度比0.9996。按经度分为60个带,没带6度,从西经180度算起 | 坐标(x,y)加投影带号才能唯一表示地球表面一点;坐标与经纬度或者ECEF坐标系有确定的转换关系 |  | 平时定位所输出的坐标系 |
| 车体坐标系—b系 | 原点:载体质量中心与载体固连,车体选取原点在后轴中心位置;X轴:沿载体轴向指向右;Y轴:指向前;Z轴:与X、Y轴满足右手法则指向天。(R-F-U右前上坐标系) | 与载体固连在一起,随载体一起转动;与n系的旋转关系可以表征载体的当前姿态信息 |  | / |
| IMU坐标系 | 原点:陀螺仪和加速计的坐标原点;X、Y、Z三轴方向分别与陀螺仪和加速计的对于轴向平行 | 与载体固连在一起,不考虑安装偏角,与载体坐标系重合;与n系的旋转关系可以表征载体的当前姿态信息 |  | / |
| 相机坐标系 | 图中O点为摄像机光心(投影中心),Xc轴和Yc轴与成像平面坐标系的x轴和y轴平行;Zc轴为摄像机的光轴,和图像平面垂直 | 通常IMU坐标系的原点在世界坐标系的位置是已知的,通过IMU坐标系到相机坐标系的外参,以及IMU坐标系的姿态,可以得到相机坐标系到世界坐标系的转换 |  | / |
| 激光雷达坐标系 | 原点:多线束中心旋转轴的交点处,z轴沿轴线向上;X、Y轴如俯视图所示 | 通过IMU坐标系到激光雷达坐标系的外参,以及IMU坐标系的姿态,可以得到激光雷达坐标系到世界坐标系的转换 |  | / |
无人车定位信息中涉及的坐标系


















 2222
2222

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









