







文章目录
引言
- 图像处理中有许多操作可以通过预计算不变的部分来进行加速,比如图像去畸变、投影等,可以先计算出map,loop中remap即可。一般模式是:逐点的矩阵计算(如投影),存在预计算加速的可能性。加速思路是:
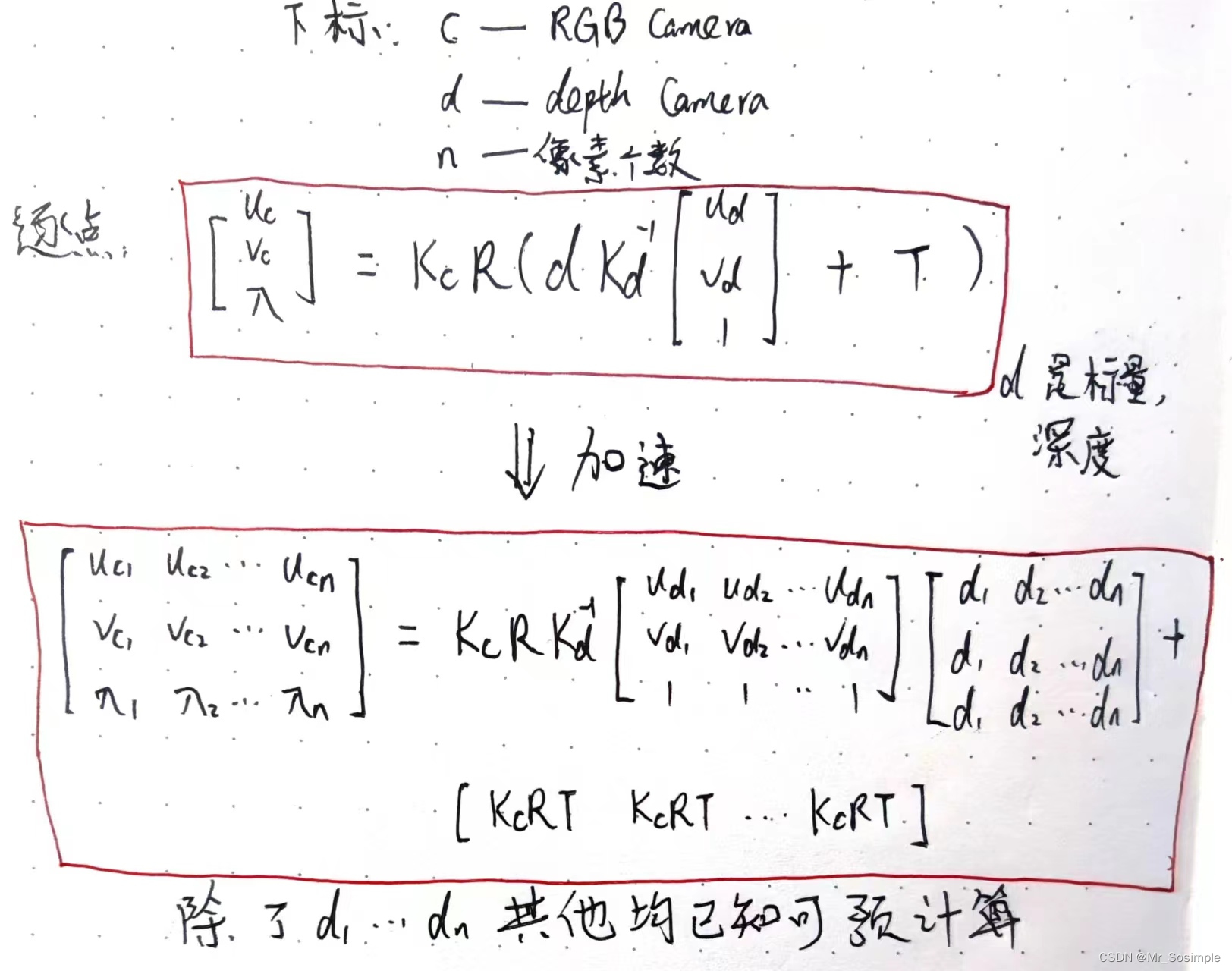
寻找不变的部分(矩阵、map等),然后将其预先算出。map其实就是像素位置变化了而已(重新索引)。 - 在RGBD深度图对齐到RGB中也是如此,该问题需要将深度图中的每一个像素通过d和K恢复到深度相机下的3D点,再通过深度相机和RGB相机的外参R,T将3D点转换到RGB相机坐标系下,再通过RGB相机的K投影到RGB像素坐标系中。这里面涉及多次矩阵运算,并且需要逐点进行相同的矩阵运算。这里面就存在加速的可能。
深度图对齐到RGB的加速技巧
思路
- 由于矩阵在loop计算中不变,可以将多个矩阵运算先计算出来
- 逐点的计算转为矩阵运算
公式


















 6775
6775

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









