







- 现象:步进电机转速慢的情况下会产生震动
- 原因:本身的两个特性:矩频特性、低频特性
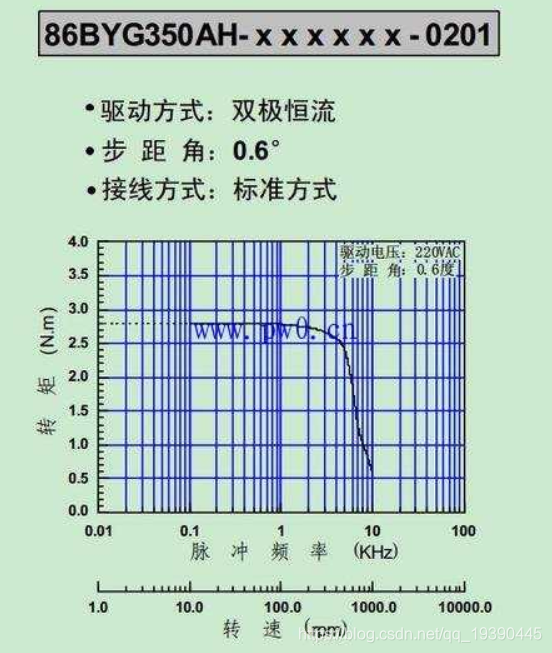
(1) 矩频特性:
研控57步进电机
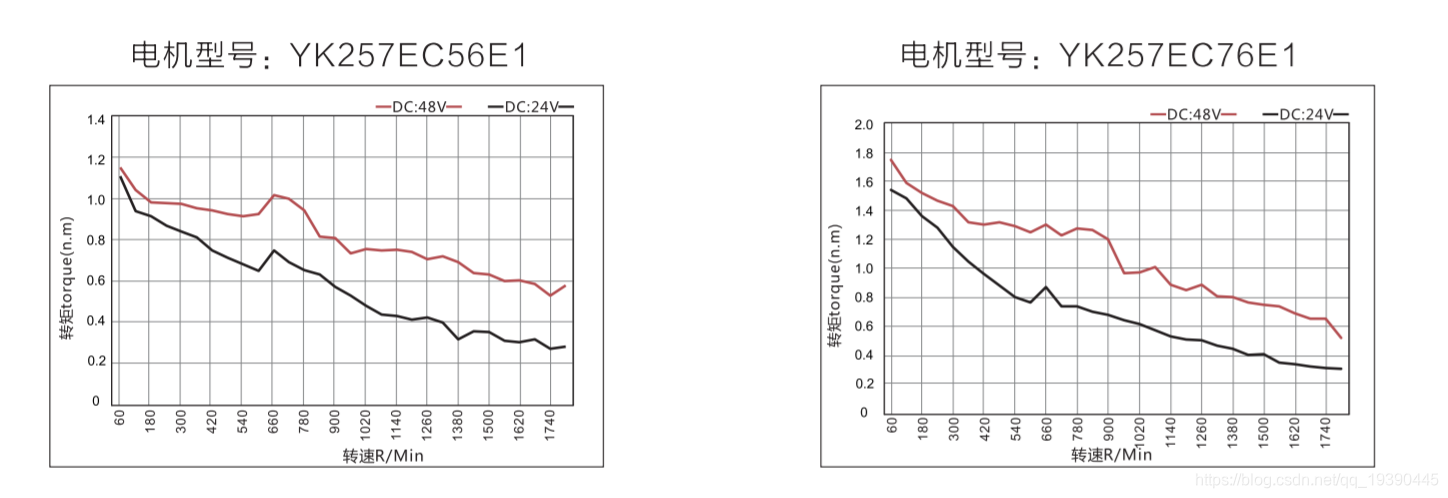
启动时脉冲频率过高,电机输出扭矩较小,负载较重时可能会丢步,从而产生震动。
选步进电机时按扭矩来选,不按功率选。
(2)低频特性
在脉冲频率很低时,一般是180-250pulse/s所对应的转速是5-10转,步进电机不可避免的会产生震动。
n=1.8*f 步距角1.8 脉冲频率f 转速n
两相步进电机的低频震动区间是40-120rpm。
- 消除震动的方法
1.增加减速机
2.换伺服机,各方面性能好,价格贵,控制复杂
3.增加细分
4.更换步距角较小的电机,选用五相步进电机,步距角为0.72度

















 1698
1698

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









