







关注同名微信公众号“混沌无形”,阅读更多有趣好文!
原文链接: 差速驱动机器人轮间距校准(包含原文PDF百度云下载链接)


履带式机器人和四轮驱动移动机器人(SSMR)也是差速转向的范畴,更准确的说,是通过差速方式实现滑动转向的,这类机器人运动规律及运动模型分析可阅读之前的文章《四轮驱动(SSMR)移动机器人运动模型及应用分析》和《履带式机器人运动模型及应用分析》。
本文以四轮驱动移动机器人为例阐述其轮间距测量方法,而履带式机器人的“轮间距”测量思路与之一致,只需要将履带等效为“驱动轮”并进行“轮直径校准”即可。
在文章《四轮驱动(SSMR)移动机器人运动模型及应用分析》的实验章节已经有阐述这类滑动转向机器人的“轮间距”校准方法了,这里再详细介绍校准方法,并与上述两轮差速驱动机器人轮间距校准方法进行比对。
这里先下一个结论:采用滑动转向的机器人进行轮间距校准非常困难,校准精度不高,且意义并不是很大。
在《四轮驱动(SSMR)移动机器人运动模型及应用分析》中有阐述:
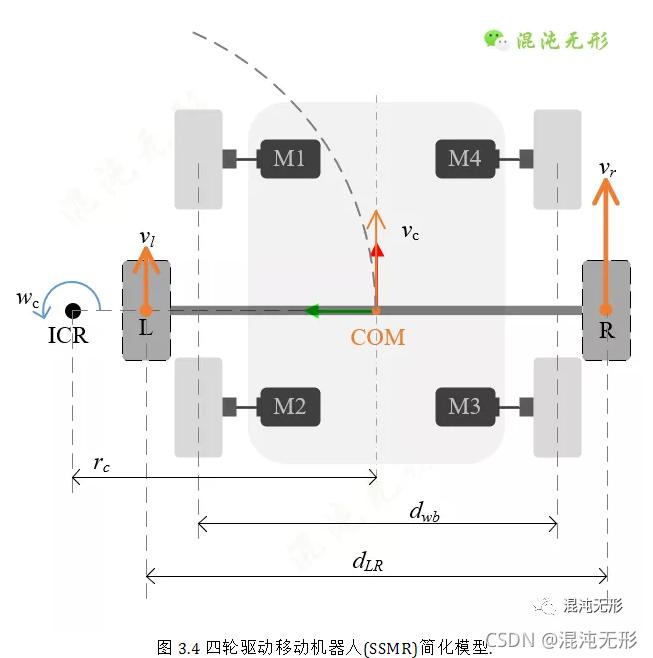
滑动转向比差速转向多了横向摩擦力,也就是差速转向是纯滚动摩擦,而滑动转向是滚动摩擦和滑动摩擦的叠加,而滑动摩擦对机器人运动的影响很难量化估计,因此为了简化四轮驱动移动机器人运动学模型的表达,才将其简化为两轮差速模型,见图 3.4。
简化为等效两轮差速模型之后,进行了运动学分析,得到运动学方程如下
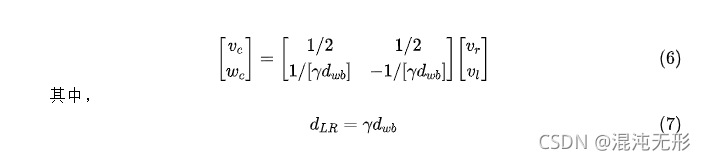
式中,对应图 3.4中:dLR表示虚拟轮间距,dwb表示实际的左右侧轮间距,γ为无量纲参数。可见公式(6)和公式(1)如出一辙,但在校准方面又差别很大。
从公式(6-7)可以看出,最重要的参数,就是虚拟轮间距dLR,而dwb和γ都是次要的。但在《四轮驱动(SSMR)移动机器人运动模型及应用分析》中阐述:虚拟轮间距(或无量纲参数γ)是随着机器人的总负载、轮胎与地面的相对摩擦系数、转弯半径及质心位置等参数的变化而发生变化的,并不像两轮差速机器人轮间距是一个定值,所以常用的方法就是做实验来得到不同转向半径下的虚拟轮间距。
这里补充一点:从四轮驱动机器人运动学模型(6)可以看出,需要对应的精准的虚拟轮间距,所以直接使用直尺(或卷尺)测量实际的左右侧轮间距dwb即可,不需要太精确。
这里假设机器人的总负载、轮胎与地面的相对摩擦系数及质心位置等参数不发生变化,仅有转弯半径发生变化,由于转弯半径不同,机器人转向运动过程中的滑动摩擦力是不同的。
这里笔者给出一种简单实用的测量参数γ的方法(方法来自《四轮驱动(SSMR)移动机器人运动模型及应用分析》):
①在机器人上安装陀螺仪,用于测量机器人转动过程的角速度wc。
②精确控制机器人的四个轮子安装设定速度转动,保证两左(右)侧轮的转速相同,并通过编码器反馈数据计算虚拟轮子的线速度,vl和vr。
③利用公式(8)计算出此时的虚拟轮间距dLR,除以dwb得到γ。

式中,rc表示质心转弯半径(公式8的具体推导可参考《四轮驱动(SSMR)移动机器人运动模型及应用分析》)。
④绘制γ和[(vl+vr)/( vr- vl)](或wc)的数据图,并对数据曲线进行拟合,得到γ和[(vl+vr)/( vr- vl)](或wc)的关系表达式。
当机器人一旦转弯时,机载陀螺仪便可反馈实时机器人角速度,根据关系式得到对应的γ。当机器人通过陀螺仪采集完数据,且在实际应用时不允许使用陀螺仪,则在数据拟合阶段,对γ和[(vl+vr)/( vr- vl)]的进行拟合(也就是需要记录[vl vr]),理论依据可参考公式(8)。
如图 3.5所示,文献[1]中对履带式机器人常规运动时的轴间距进行了测量,其中ICRl/ICRr map表示机器人运动过程中等效的左/右虚拟轮的位置,可以看出其两虚拟轮的位置是不固定的,在一个范围内,且左右不对称。若不要求高精度的运动模型,则可使用一个点来估计(代替)ICRl(或ICRr) map,以简化计算,否则,则需要使用一张表来记录机器人左右虚拟轮位置与转速之间的关系。

精彩的理论论证过程见原文链接(含全文下载链接)
由于网页排版效果一般,所以笔者按照期刊论文版式为小伙伴们整理了原文PDF,方便收藏和回味。
原文链接:差速驱动机器人轮间距校准(包含原文PDF百度云下载链接)
CSDN下载链接:如果喜欢的话,可以关注同名微信公众号“混沌无形”,阅读更多有趣好文!



















 2582
2582

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











