






问题描述
机器人运动控制中,摩擦力矩补偿是一个重要的环节。在机器人动力学模型中,重力和关节摩擦在低速运动时占主导因素,因此对机器人进行重力-摩擦补偿是机器人力控制中被广泛采用的方法。
![]()
库伦-粘滞摩擦模型是摩擦力辨识的常用方法,其中摩擦力模型为:τf = fcsgn(q˙) + fv(q˙)。研究人员广泛使用恒速实验来提取关节摩擦力,因为匀速运动时关节惯性力为0,科里奥利力的影响在低速时可以忽略。该方法要求关节以恒定速度顺时针和逆时针移动,并随着速度的变化重复上述运动。
控制方法方面,串联机械臂运动控制有多种方法,比较有代表性的三种:独立关节嵌套双环控制、独立关节嵌套双环加重力/摩擦力补偿控制、计算力矩控制,另外还有拖动示教控制。
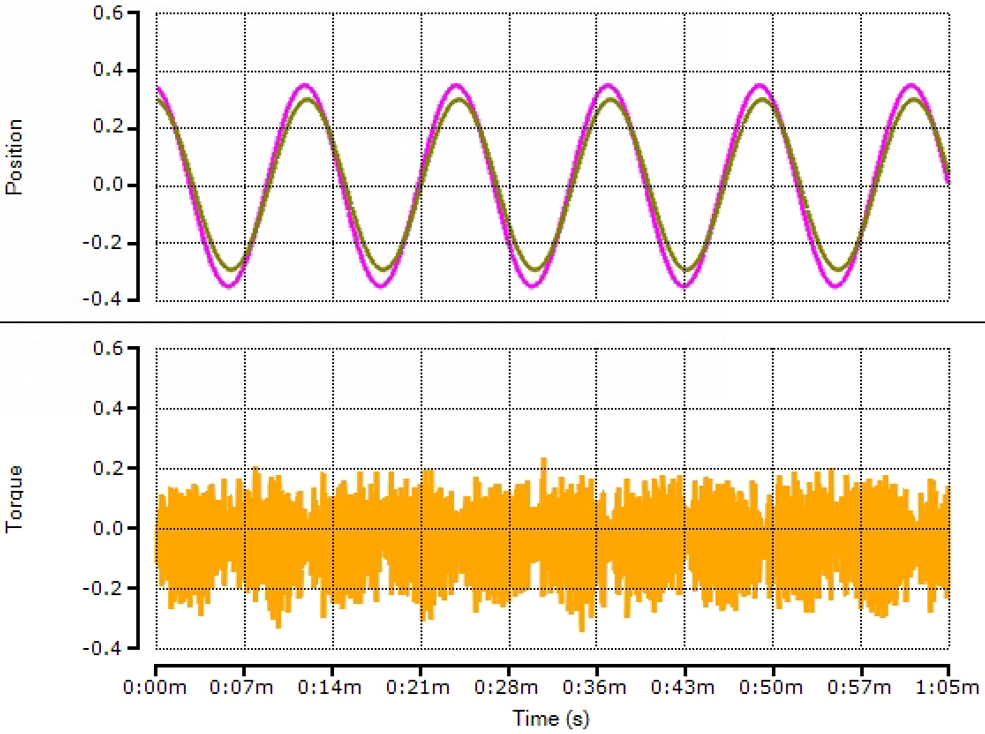
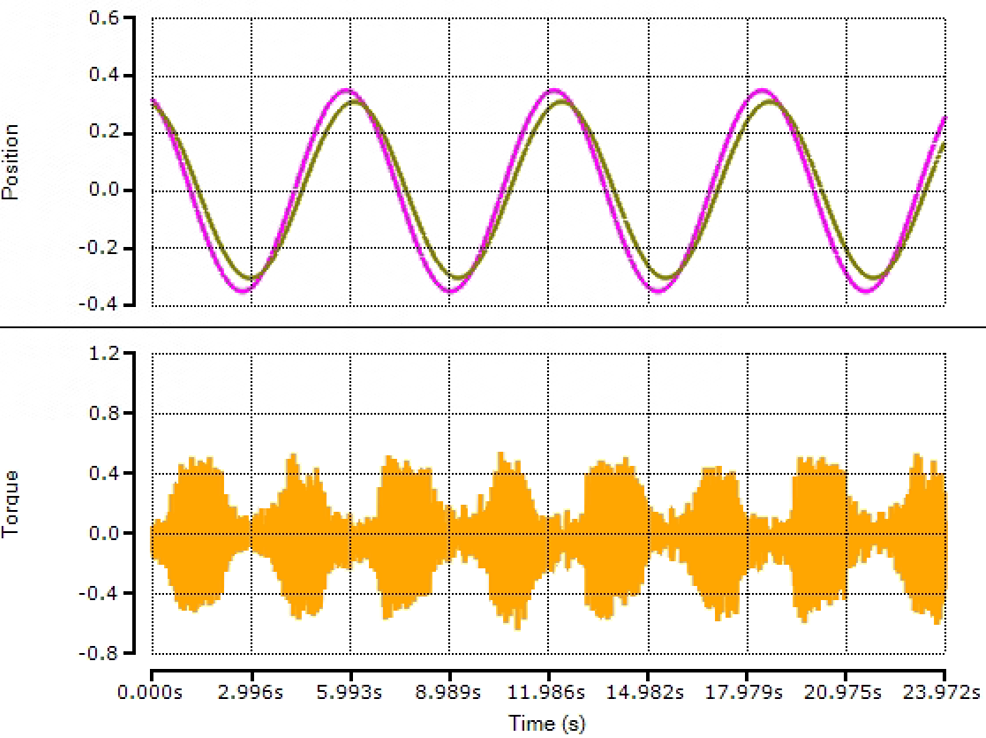
其中,独立关节嵌套双环加重力/摩擦力补偿控制是一种有效的控制方法。在这种方法中,每个关节单独使用两个闭环控制,外面的控制环为关节角度控制环,里面的控制环为关节角速度控制环。同时,通过引入重力、摩擦力等补偿项,对机器人进行精确控制。
![]()
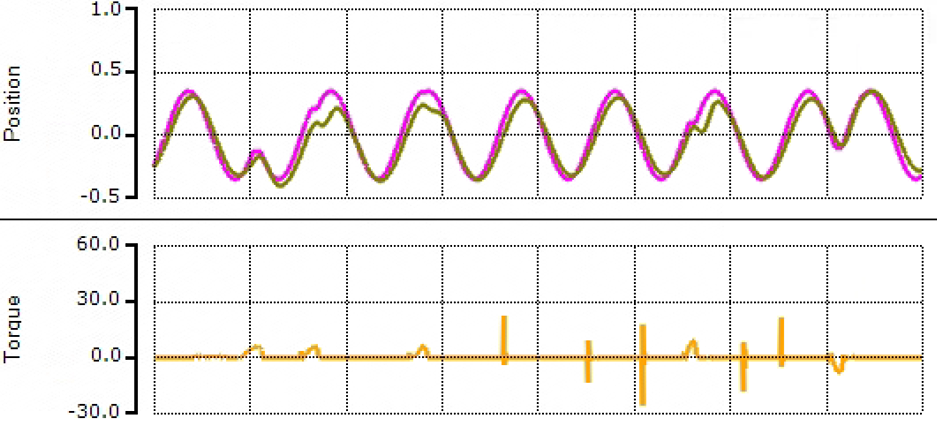
20°sin0.5t=π/9*sin0.5t
20sin0.5t
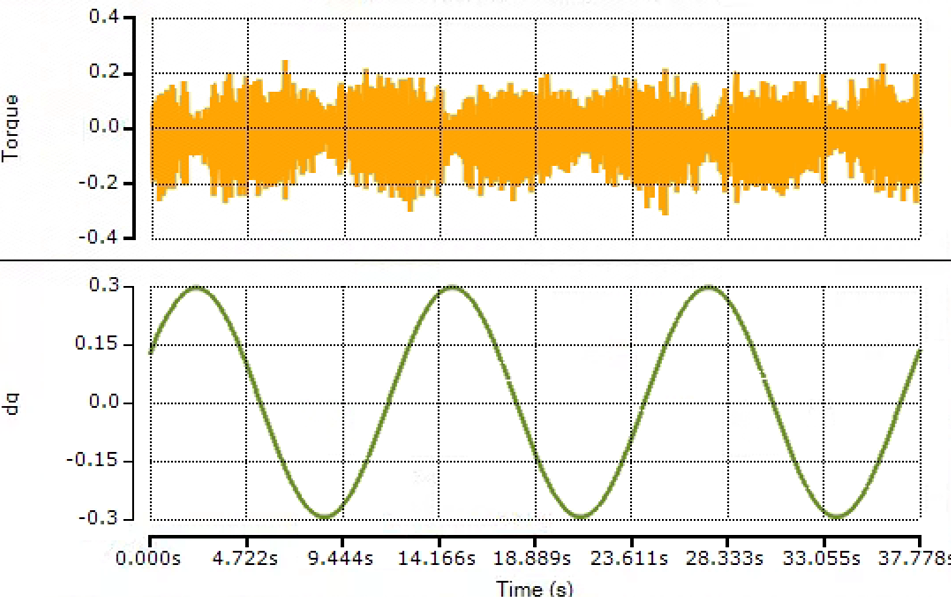
20sint
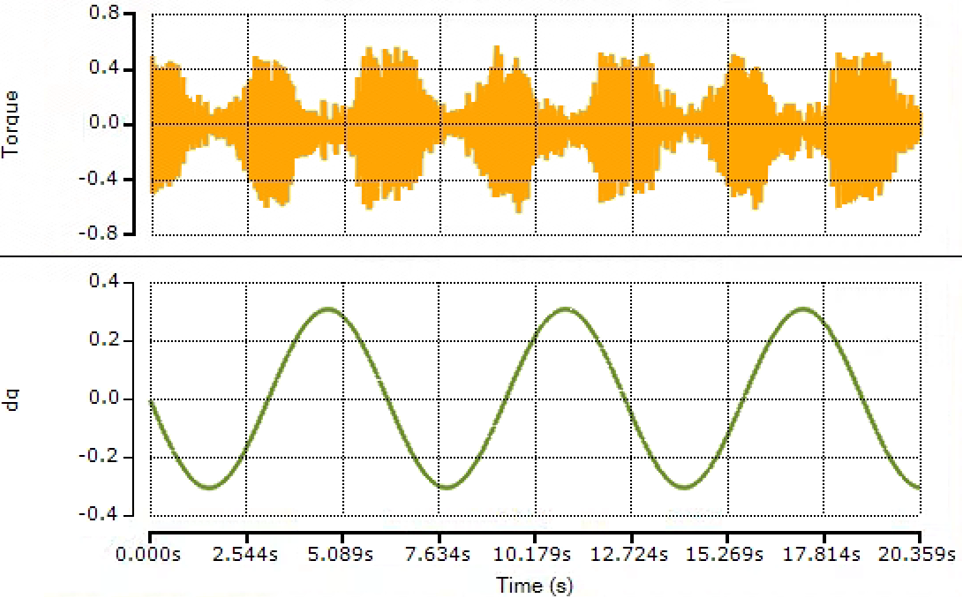

最后再用MATLAB拟合确定参数!!!
参考文献:
 https://zhuanlan.zhihu.com/p/604255934
https://zhuanlan.zhihu.com/p/604255934

















 7740
7740

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









