







【在英伟达nvidia的jetson-orin-nx上使用工具minicom和python调试uart1和uart2-初步调试-熟悉了解】
1、概述
近期开始学习英伟达的工控板,作为新手还是有很多不同懂得地方,但是一部分它用的linux系统,有点像玩树莓派,其中树莓派的40-pin和英伟达jetson的40-pin很像,通过自己一段时间学习调试串口,终于可以简单通信了。
开始的时候,自己也是什么都不是很懂,从新手一点点摸索过来,现在使用工控机,调试串口简单通信也已经没有问题了,算是有些进步吧。
2、实验环境
初次了解,这里使用提供软硬件信息吧。
硬件信息:Jetson Orin nx
软件版本:5.10.104-tegra #1 SMP PREEMPT Sun Mar 19 07:55:28 PDT 2023 aarch64 aarch64 aarch64 GNU/Linux

其它硬件:usb串口转换器或者TTL转换模块
3、先行了解知识
调试uart功能需要对jetson有些基础了解,也是看了一段时间资料才有个基本认识。
(1)需要对硬件有所了解,知道硬件IO是在哪里,哪些怎么接。
(2)安装相应的库或者软件,使用apt-get命令
(3)给权限,配置权限,使其可以运行
(4)相关资料查找,一般要去英伟达官网去了解
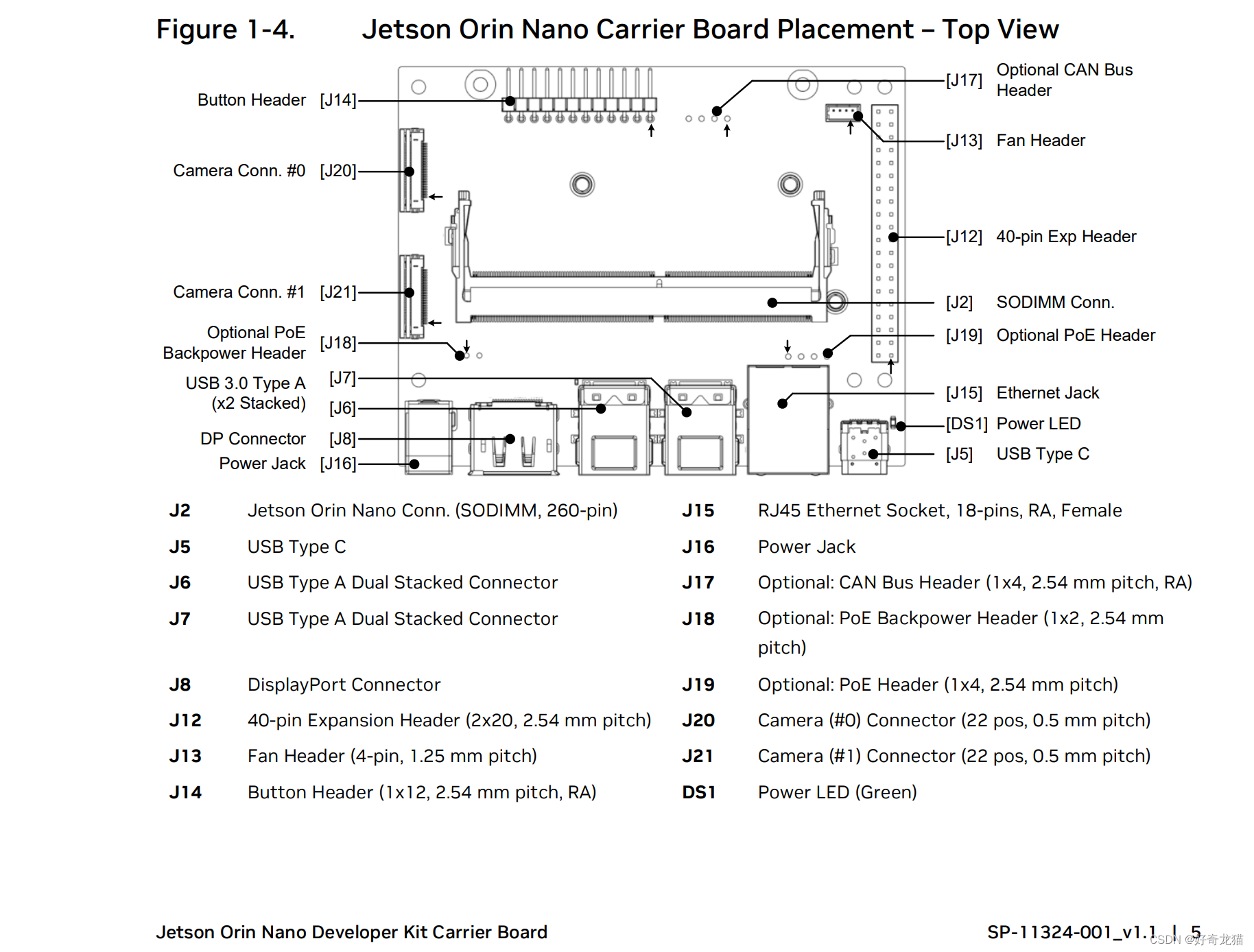
如下是核心板外设硬件图
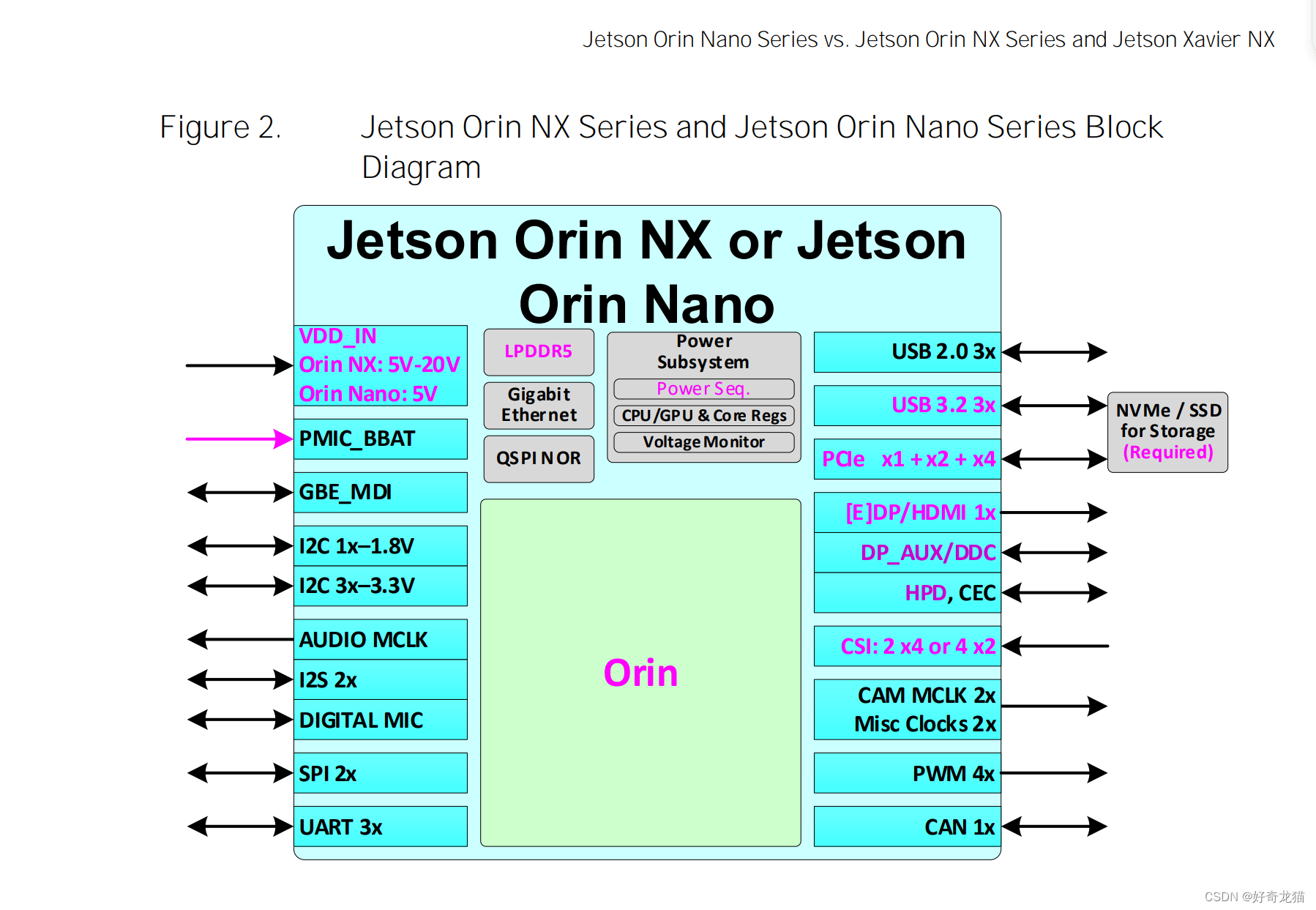
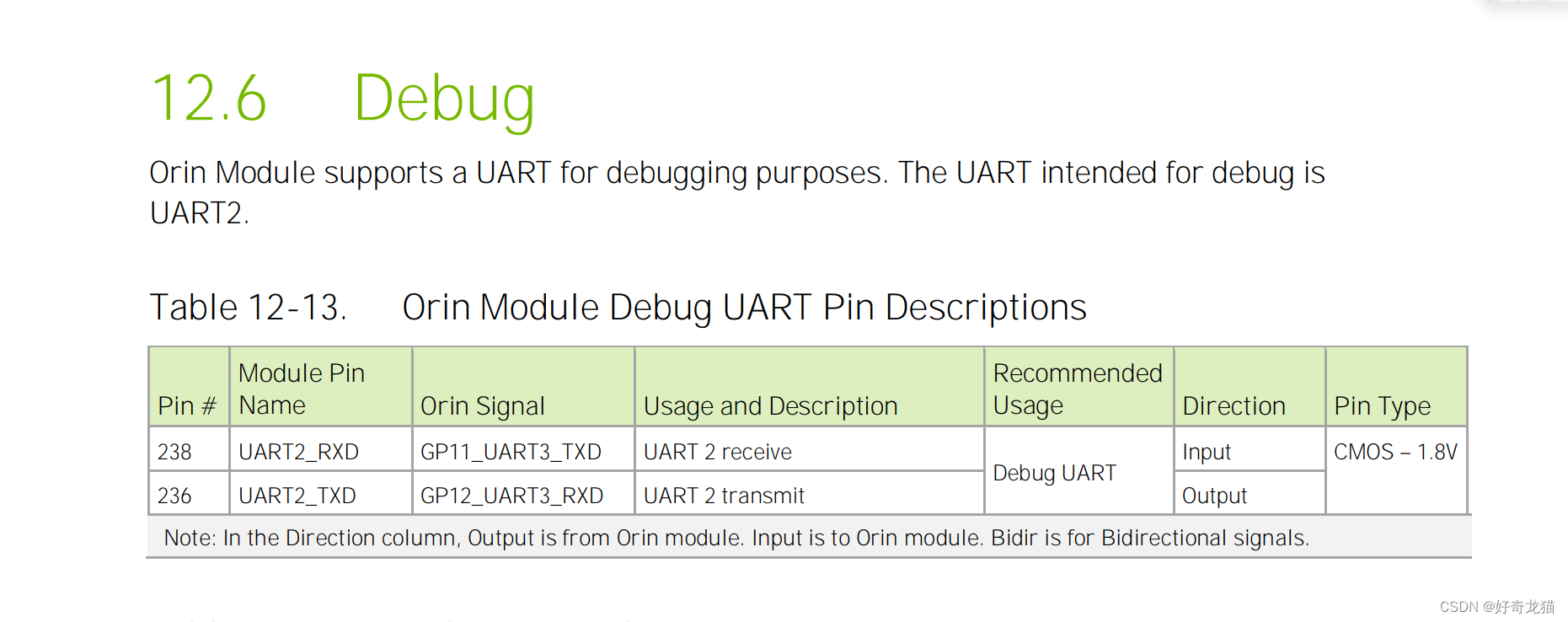
(5)uart2是调试引脚,不同配置,自动连接就可以使用。
文件名称:Jetson Orin NX Series and Jetson Orin Nano Series(Product Design Guide)
4、参考资料
自己学习也是参考了以下链接,需要罗列出来。
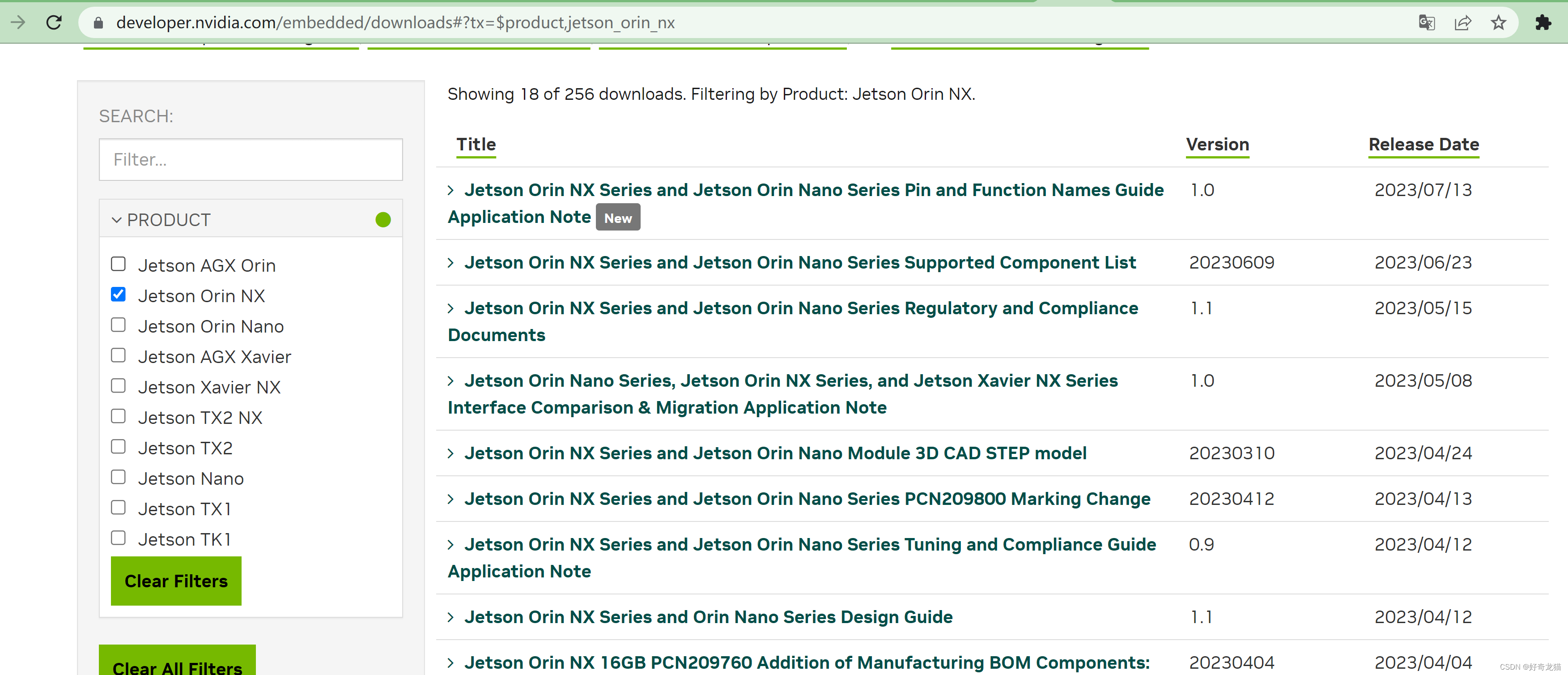
(1)英伟达官网链接,想要了解资料的话,一般都要去官网查相关资料的。
参考链接:https://developer.nvidia.com/embedded/downloads
(2)python脚本的程序代码编写参考博文,自己是根据这篇编写代码,同时了解每条python代码意义
参考连接:https://blog.csdn.net/weixin_44350337/article/details/111623475
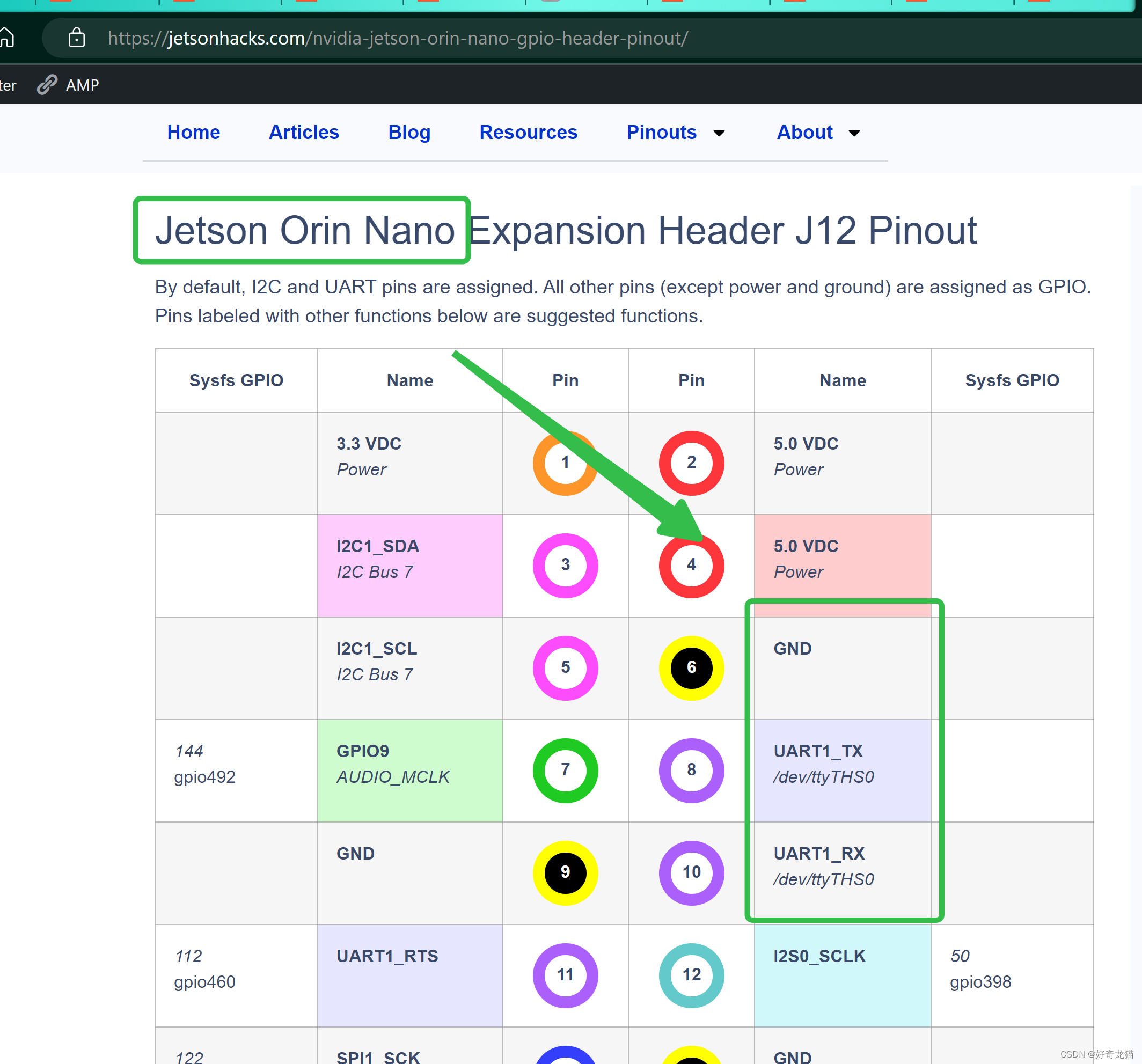
(3)如下链接,博主主要是提供了一个硬件参考图,告诉你哪个是哪个,从原理图让我们知道硬件设备。
参考链接:https://blog.csdn.net/liuyang_xyz/article/details/126500097
为此,寻找了原网站看了一下,我这个是orin nx的,所以选择对应的。
网站链接:https://jetsonhacks.com/nvidia-jetson-orin-nano-gpio-header-pinout/
为此,找到这个俯视图图片文件,如下,可以去条目一中英伟达文档哪里搜索。
文件名称:搜索:Jetson Orin Nano Developer Kit Carrier Board
(4)如下链接,主要是解决库问题,如果使用python的话,需要安装的库。
参考链接:https://blog.csdn.net/qq_25662827/article/details/119381935
sudo pip3 install pyserial
sudo pip install pyserial
5-1、操作步骤-python脚本的方式(uart1)
1、硬件连接-引脚连接
需要查找硬件引脚,通过之前查找资料,我们知道uart1在40-pin上,uart2为调试端口。
如下,为我自己板子实物图,也就是J14和J12 ,上边有丝印
//uart1 - j12
6号引脚-GND
8号引脚-uart1_TX
10号引脚-uart1_RX
//uart2-debug - j14
UART TXD
UART RXD
GND

2、安装对应库
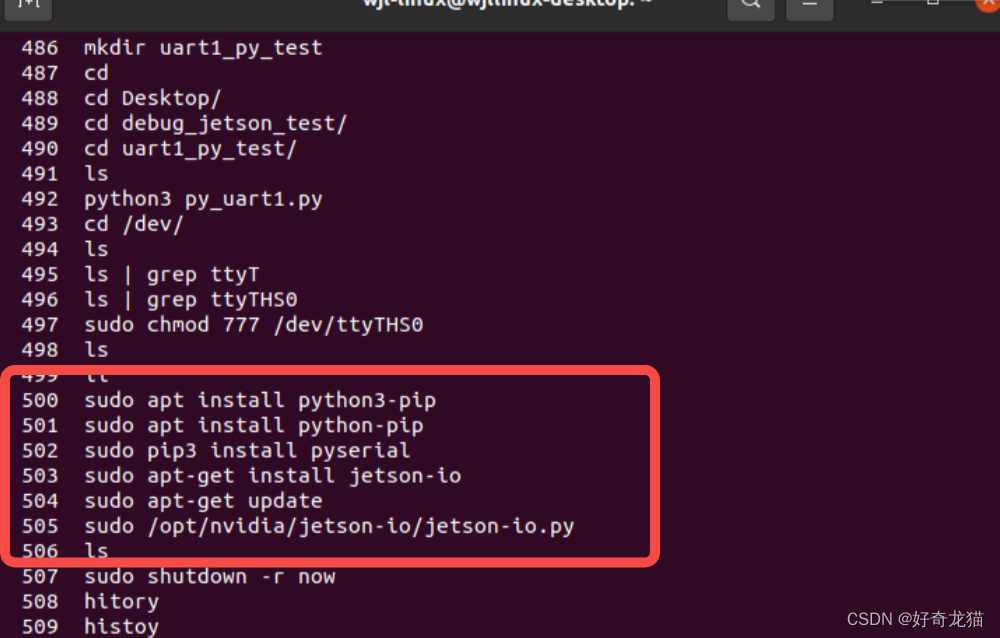
目前看来需要安装python对应的库,以下是必要的执行步骤
sudo apt-get install python3-pip
sudo apt-get install python-pip
sudo pip3 install pyserial
其它尝试,以下非必须选项,在尝试过程中,自己尝试的输入其它命令
sudo apt-get install jetson-io
sudo apt-get update
sudo /opt/nvidia/jetson-io/jetson-io.py
3、代码编写
这里我在桌面新建个一个文件件,然后新建了一个文件,你需要自己找个合适位置,创建一个文件。
//使用vim创建文件
sudo vim py_uart1.py
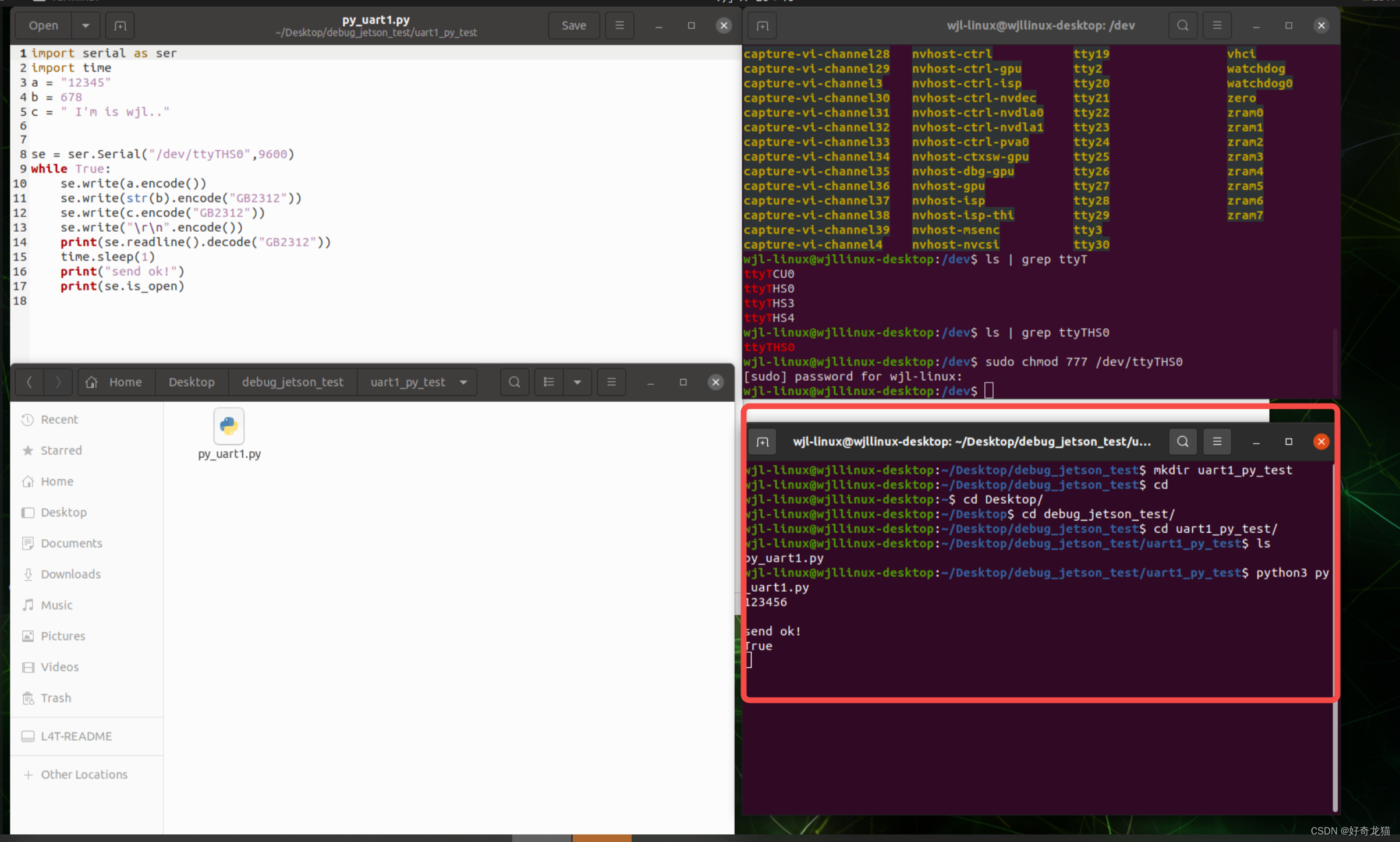
然后就是代码部分,输入代码如下(python)
import serial as ser
import time
a = "12345"
b = 678
c = " I'm is xxxx.."
se = ser.Serial("/dev/ttyTHS0",9600)
while True:
se.write(a.encode())
se.write(str(b).encode("GB2312"))
se.write(c.encode("GB2312"))
se.write("\r\n".encode())
print(se.readline().decode("GB2312"))
time.sleep(1)
print("send ok!")
print(se.is_open)
4、文件设备给权限
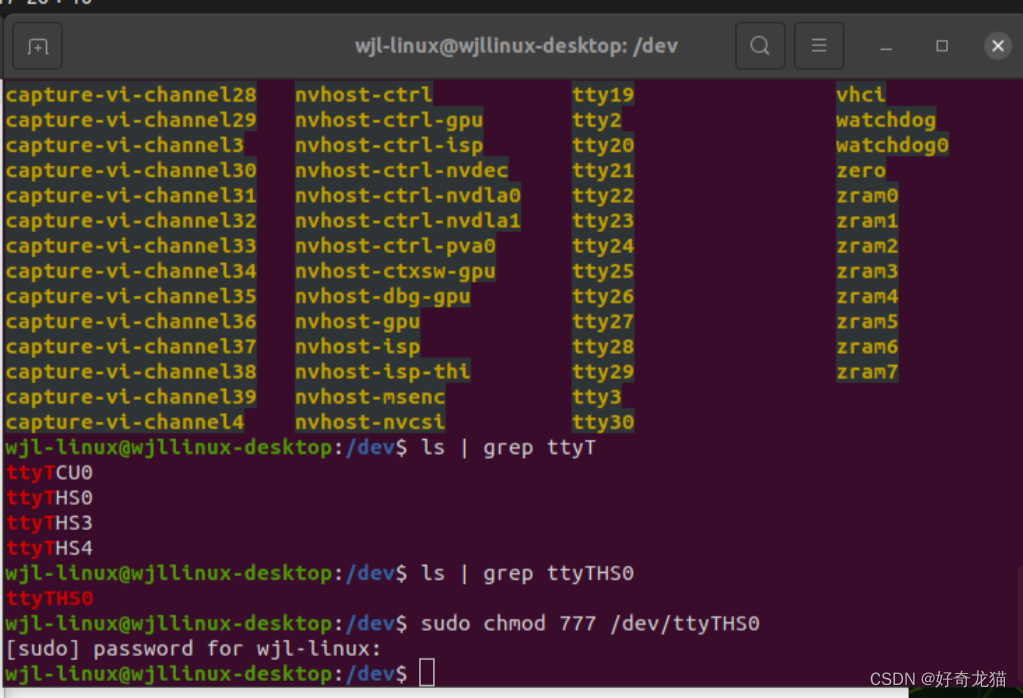
需要给在/dev/ttyTHS0以777的运行权限。
sudo chmod 777 /dev/ttyTHS0
5、运行测试
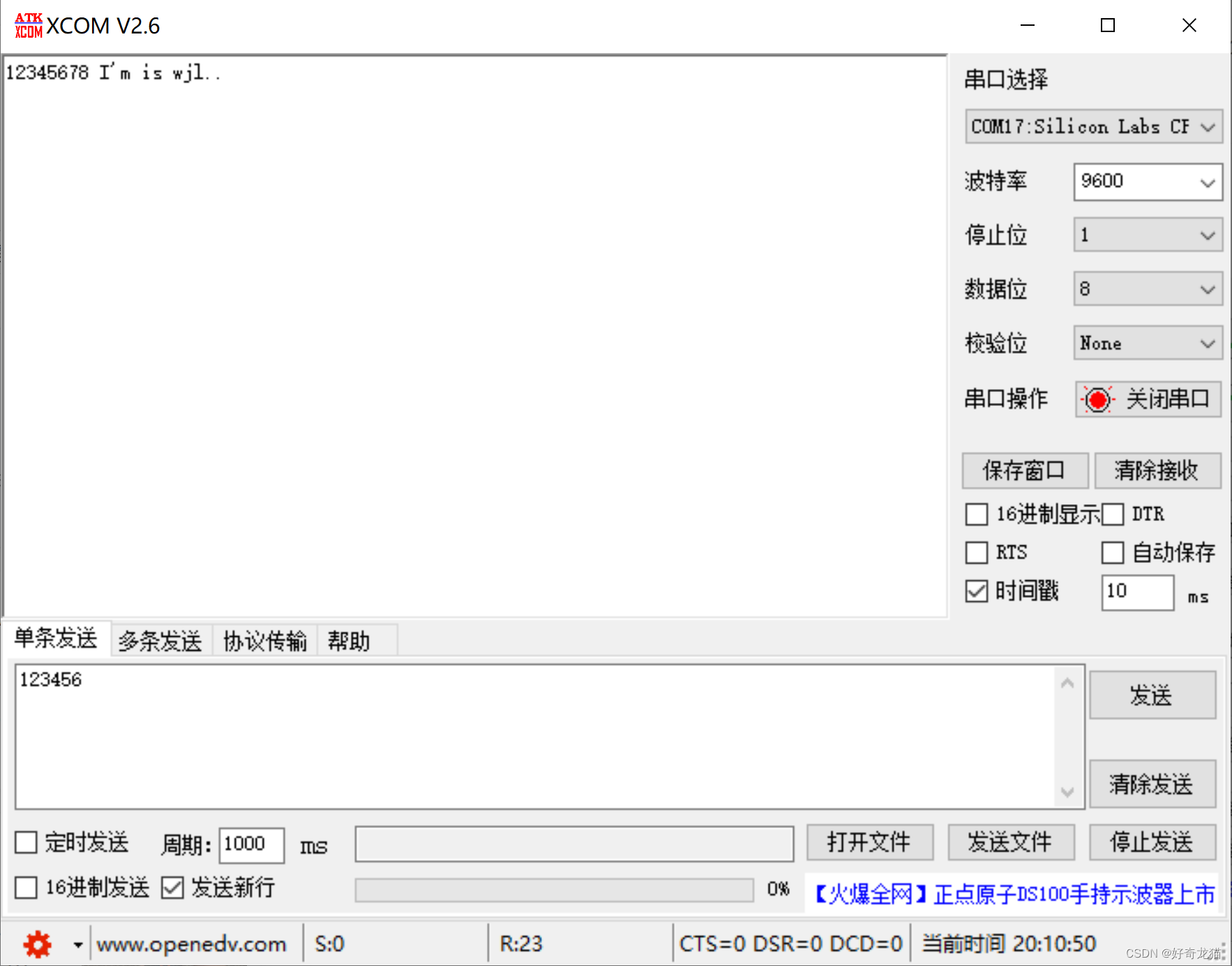
最后运行测试如下,我将py的文件和命令行的均放在一起,方便查看
另一端是我电脑PC机接收到的
5-2、操作步骤-minicom工具调试方式(uart1)
1、安装对应软件
调试的方法不只是一种,使用python这种,其实方便后续调试,编写脚本啥的,后来了解到使用minicom就不用这样费事,直接下载,然后使用就可以了,如下步骤就是如此。
sudo apt-get install mincom
sudo minicom -D /dev/ttyTHS0
网上相关教学还是挺多的,我这里直接给出参照链接:
参照链接:https://blog.csdn.net/Naisu_kun/article/details/117704009
2、运行调试
Linu终端如下
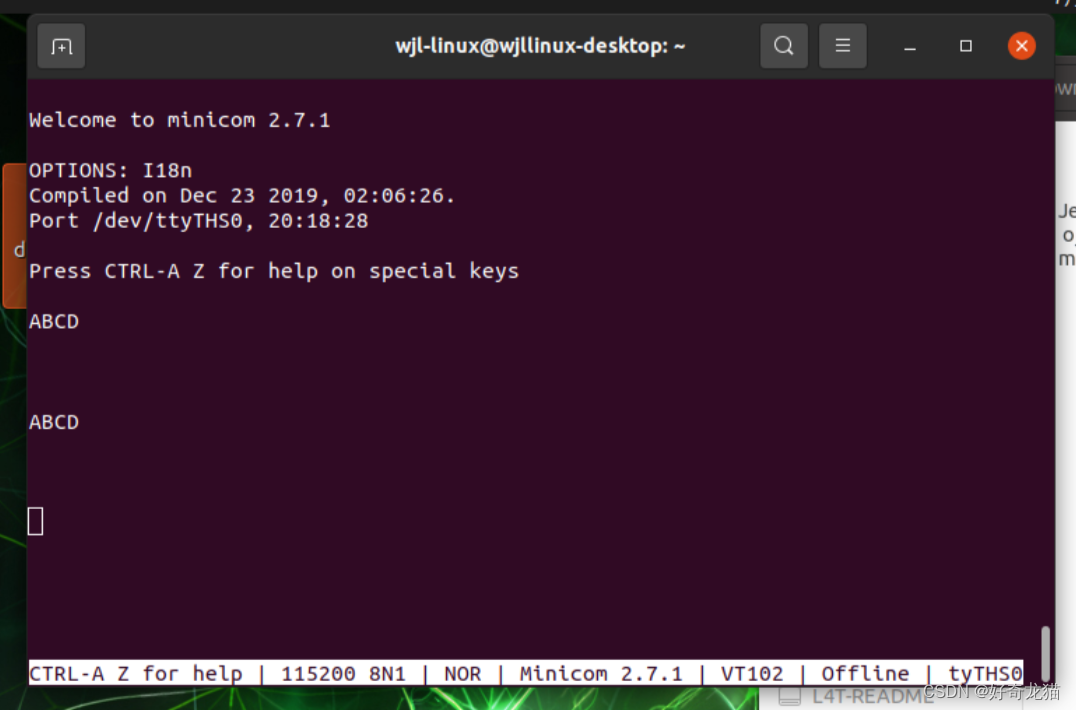
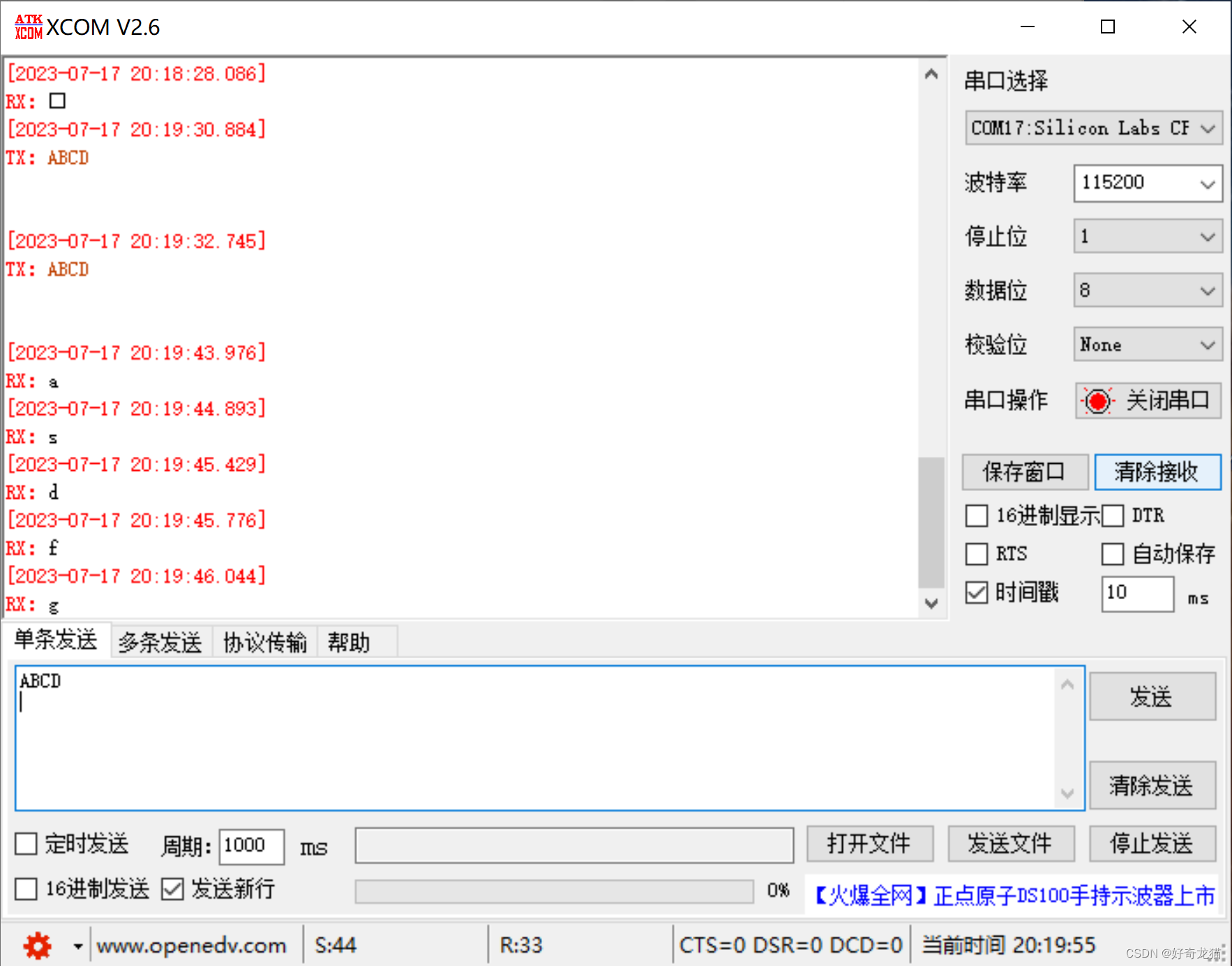
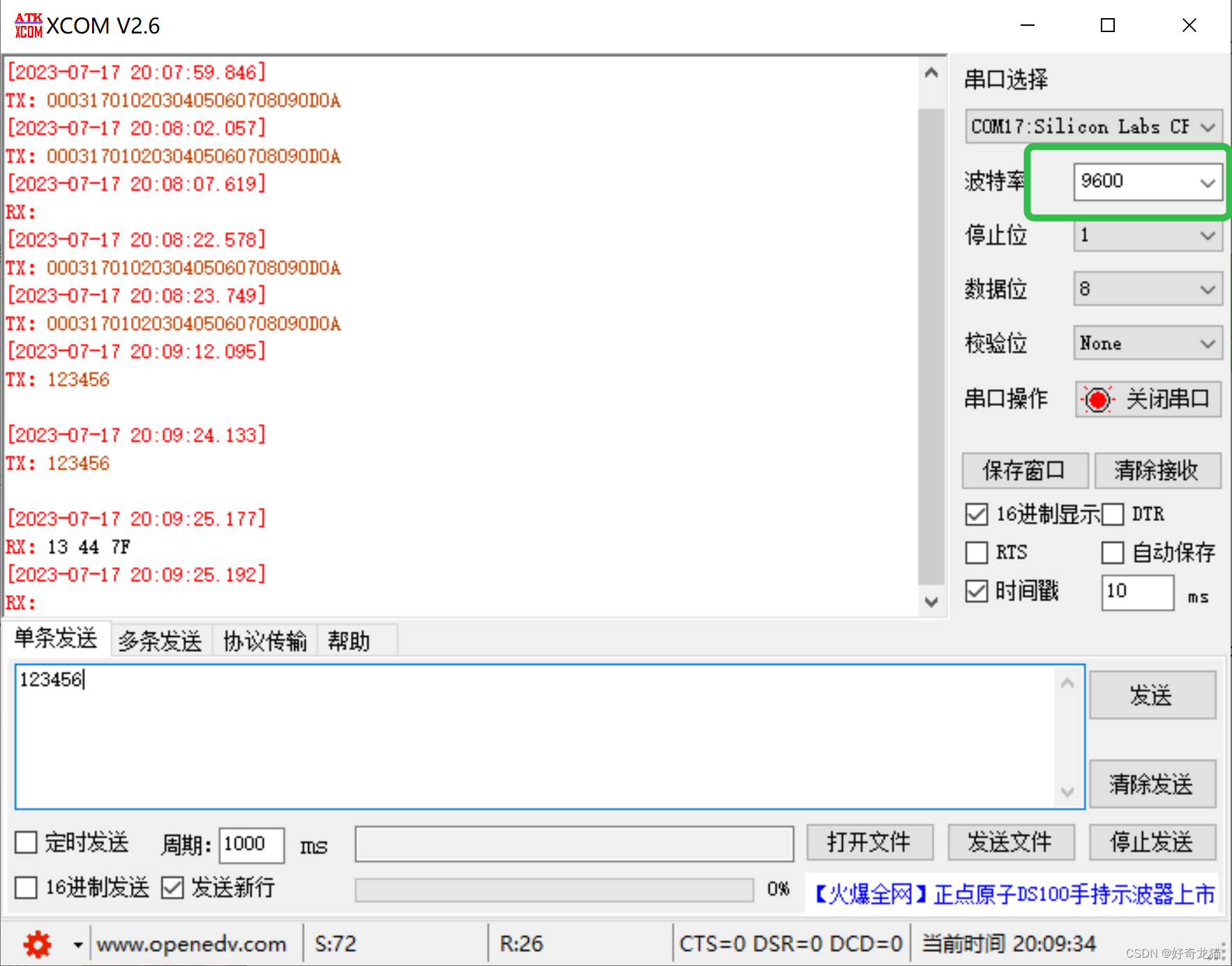
PC电脑接收端
5-3、操作步骤-调试uart2(调试端口)(uart2)
1、硬件连接-引脚连接
引脚之前已经确认了,不过还是要说明下,uart2是调试口,之前尝试时,不知道,然后用python脚本控制它,脚本内波特率是9600,发现不好使,后来发现115200就是可以的,所以调试口都不需要配置,直接可以用,主要是注意硬件连接。
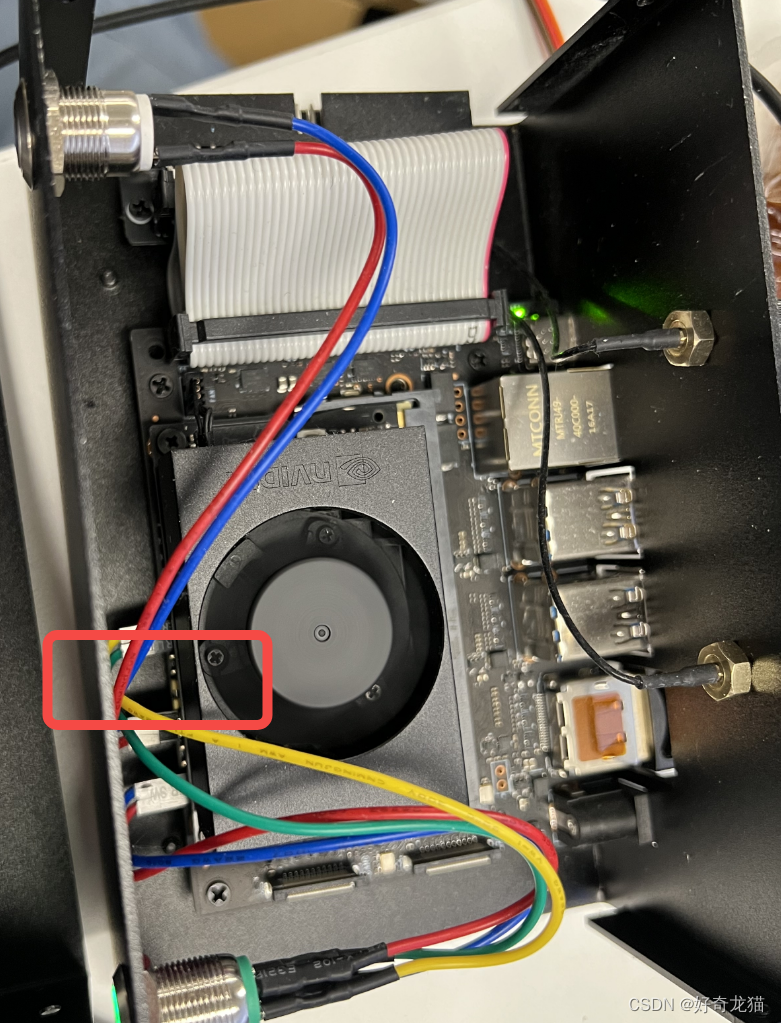
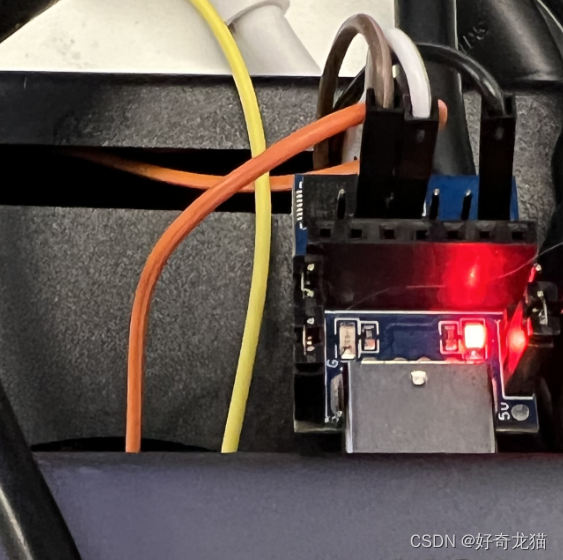
串口硬件连接,使用的是TTL转USB模块(ps:之前调试lora那个模块,复用下<.>)
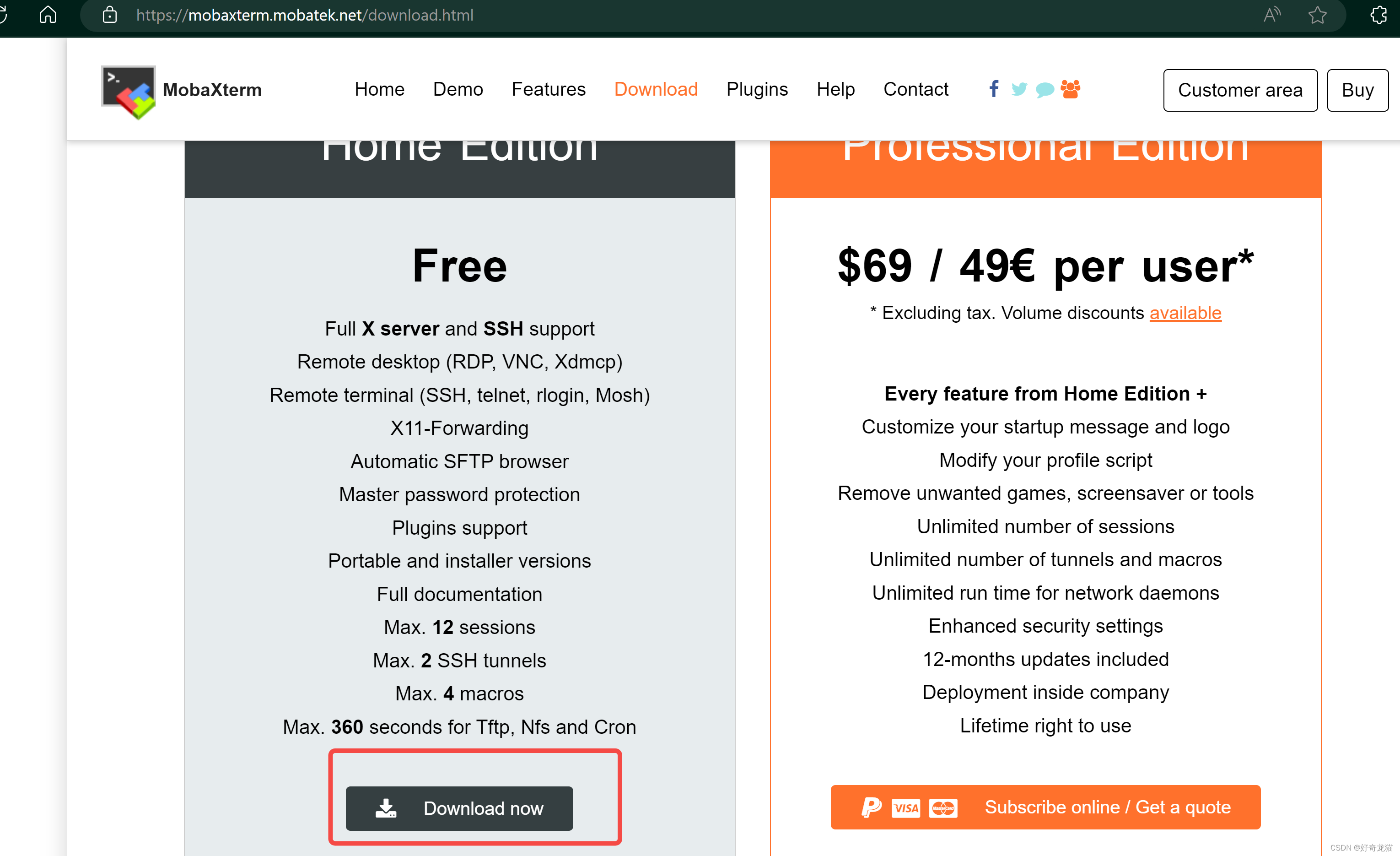
2、软件MobaXterm的下载
使用串口软件就不很方便了,推荐工具MobaXterm,并且有免费的请自行下载吧。
链接:https://mobaxterm.mobatek.net/download.html
使用方式如下
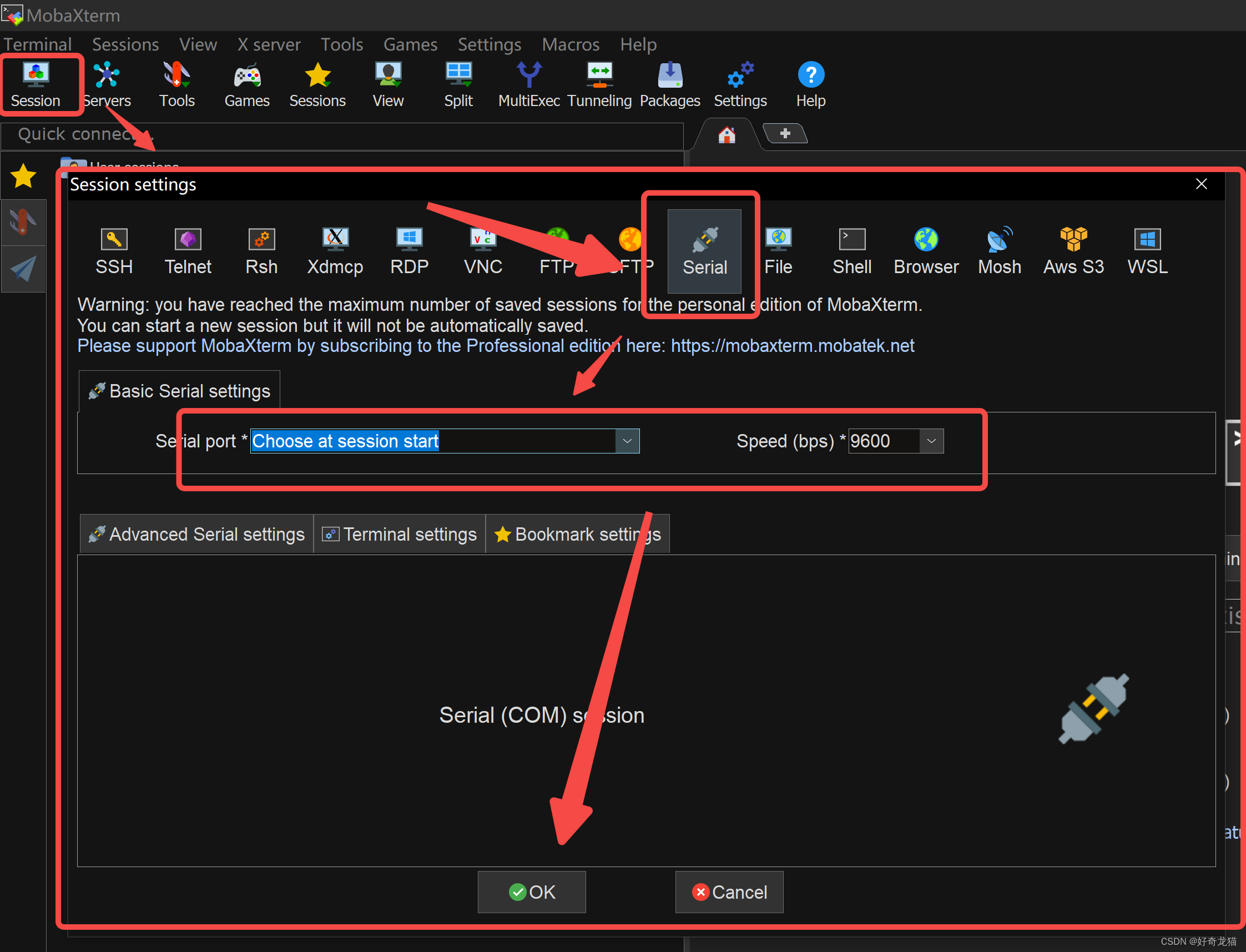
3、调试
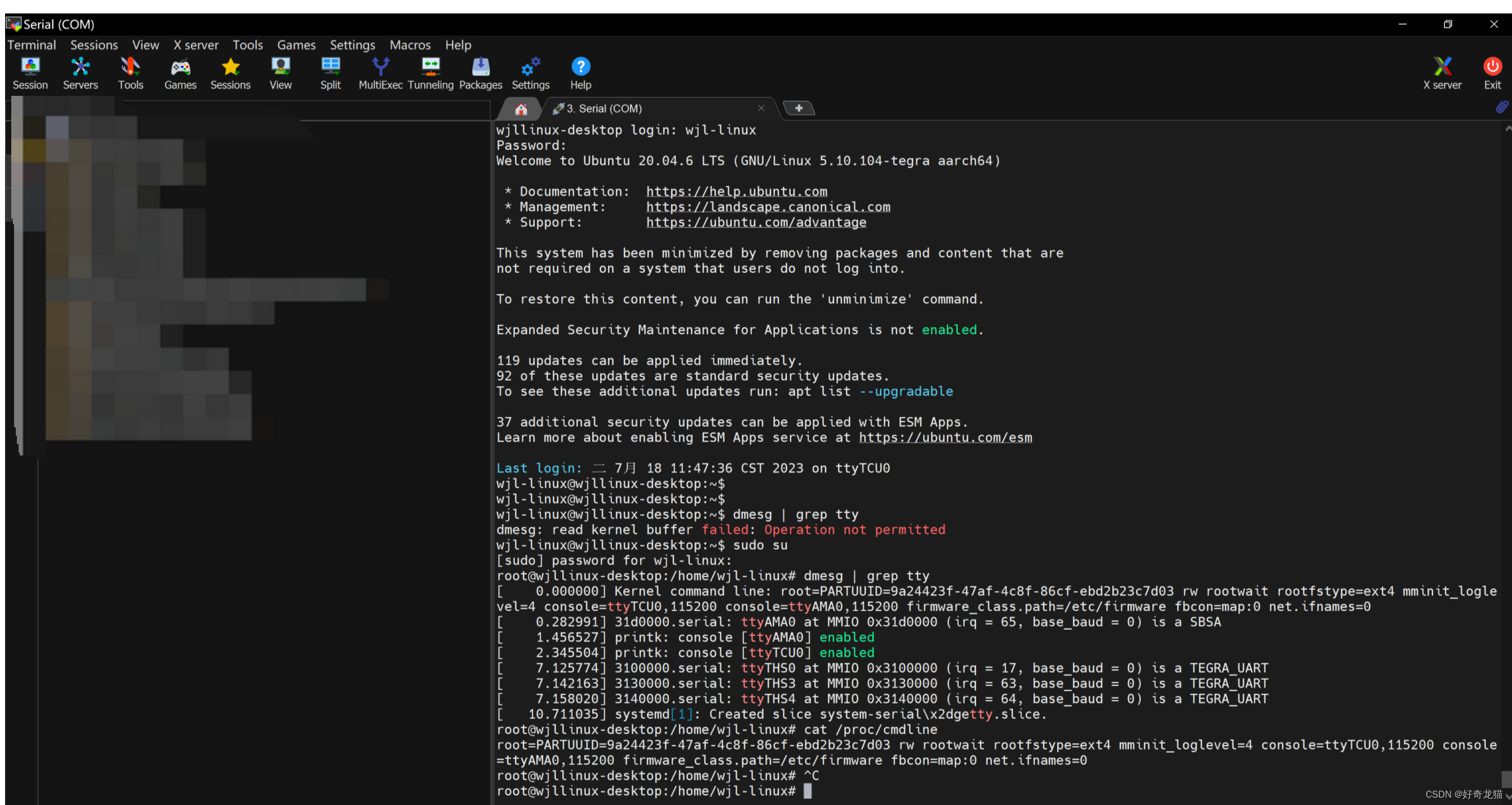
连接好硬件后,重开机会有信息打印。
然后输入用户名和密码
6、细节部分
(1)No module named ‘serial’ 问题
相关连接:https://blog.csdn.net/jiangchao3392/article/details/75107330
此问题一般就是没有安装库导致的
(2)pip3: command not found
运行pip3之前,先要安装pip3,顺序要是反了就会报。
(3)py文件报告,无法运行
我自己是手打的一遍代码,所以报了很多语法错误,代码敲错得原因。
(4)收到数据会出现乱码
一般要检查硬件连接和GND,还有是波特率,另外使用minicom时,默认波特率是115200
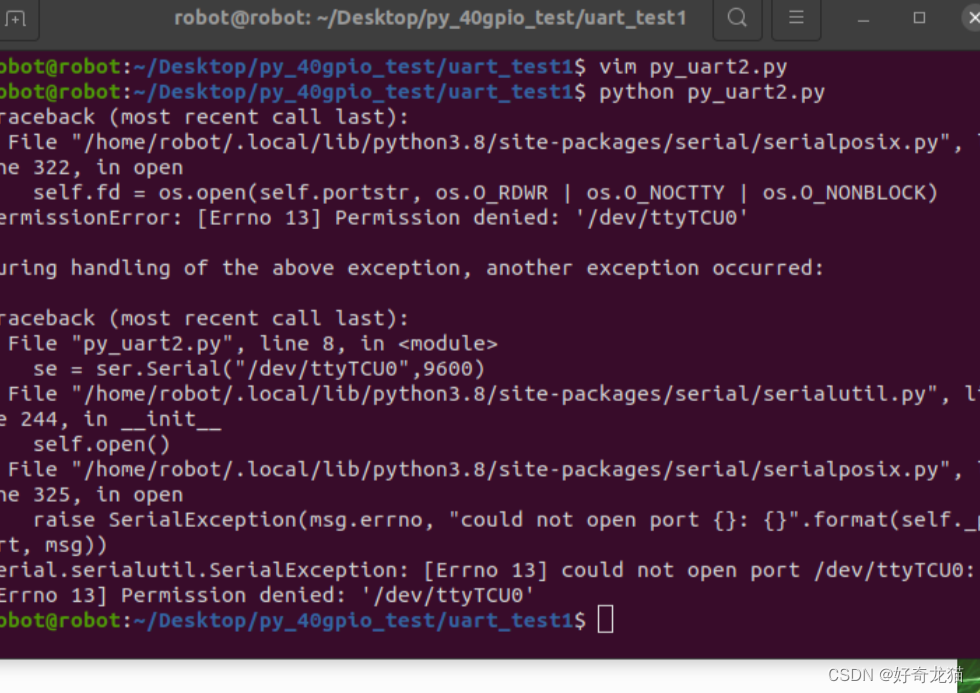
(5)uart2是调试,默认115200
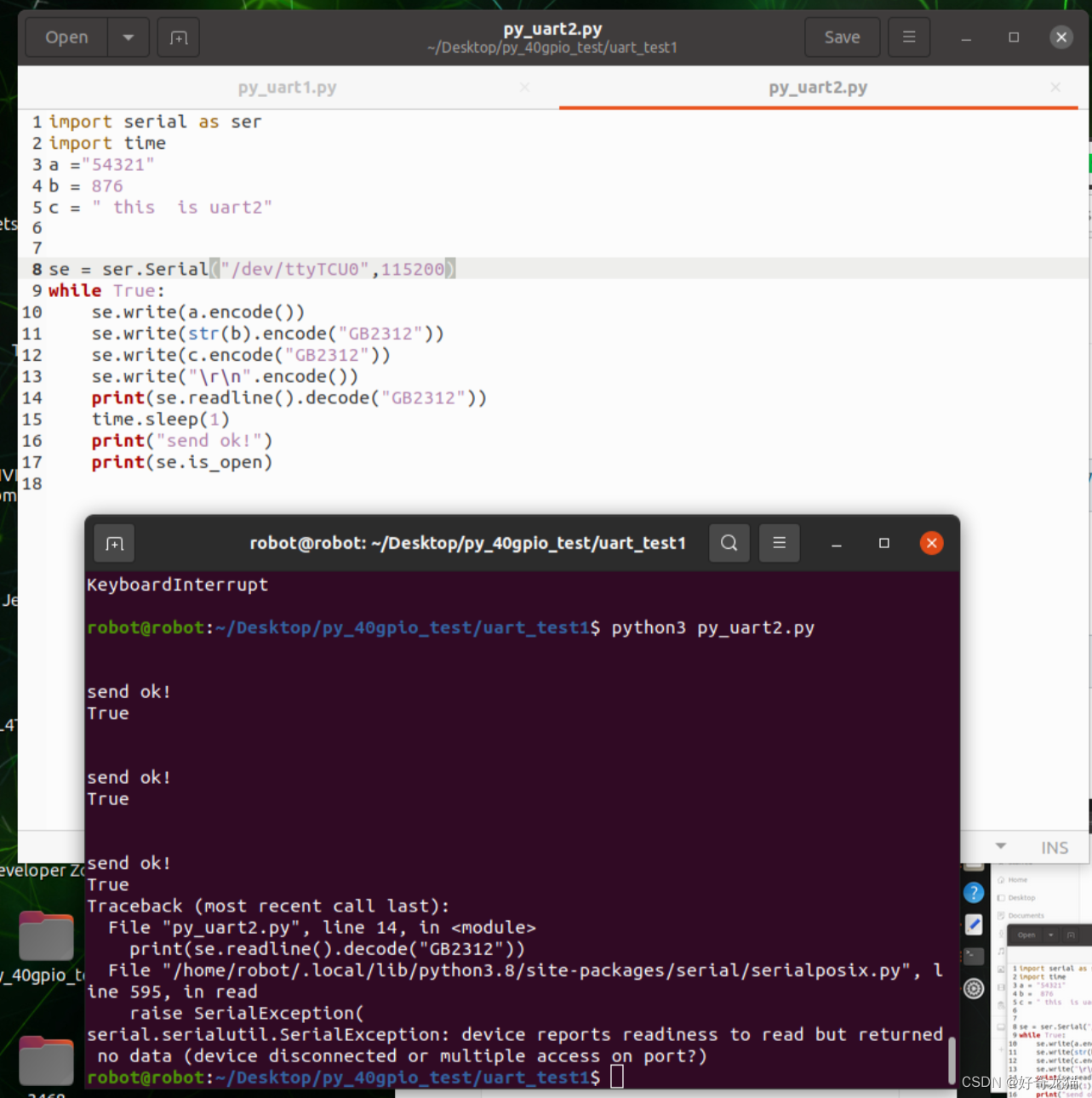
在尝试uart2时,发现9600波特率就是不行,后来才知道是调试口,如下使用python文件控制
7、总结
细节满满啊,不过从最初一点不同,到现在,已经明白许多了,总是有些收获的。


















 1861
1861

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











