







 本文介绍了在实际图优化中处理IMU零偏变化时,如何通过假设预积分观测随零偏线性变化并修正观测值。文章详细推导了旋转、速度和平移部分的雅可比矩阵,以便于计算和状态更新。
本文介绍了在实际图优化中处理IMU零偏变化时,如何通过假设预积分观测随零偏线性变化并修正观测值。文章详细推导了旋转、速度和平移部分的雅可比矩阵,以便于计算和状态更新。
IMU状态预积分零偏的更新
IMU状态预积分零偏的更新
先前的讨论都假设了在i时刻的IMU零偏恒定不变,当然这都是为了方便后续计算。
然而在实际的图优化中,经常会对状态变量(优化变量)进行更新。那么理论上,如果IMU零偏发生了变化,预积分就应该重新计算,因为预积分的每一步都用到了i时刻的IMU零偏。
但在实际的操作过程中,也可以选用另一种做法:假定预积分观测是随零偏线性变化的,然后在原先的观测量上进行修正。
具体来说,把预积分观测看成
b
g
,
i
,
b
a
,
i
b_{g,i},b_{a,i}
bg,i,ba,i的函数,那么当
b
g
,
i
,
b
a
,
i
b_{g,i},b_{a,i}
bg,i,ba,i更新了
δ
b
g
,
i
,
δ
b
a
,
i
\delta b_{g,i},\delta b_{a,i}
δbg,i,δba,i之后,预积分观测应该做如下修正:
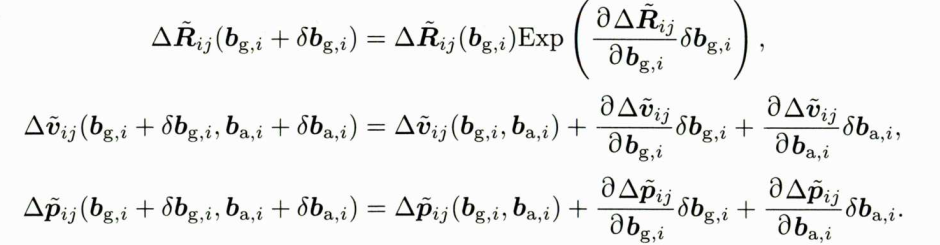
于是,问题就变成如何计算上面列写的几个偏导数(雅可比矩阵)。
下面推导这几个雅可比矩阵。核心思想就是将噪声变量移出来求线性化
旋转部分
预积分旋转观测量可以写为:
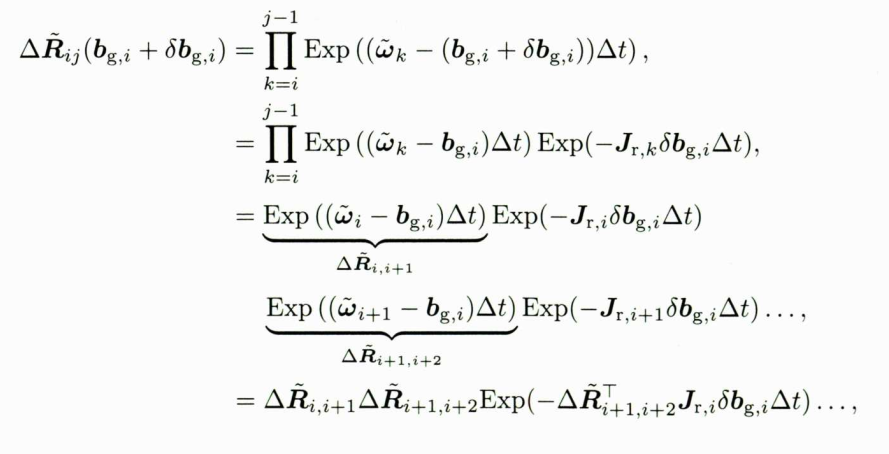
最后一行用到了BCH在
δ
b
g
,
i
\delta b_{g,i}
δbg,i为小量时雅克比矩阵接近单位阵的性质。
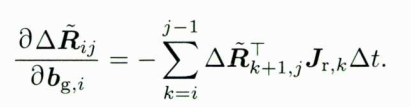
通过这种方式可以算出
△
R
~
i
j
\bigtriangleup \tilde{R} _{ij}
△R~ij相对于
δ
b
g
,
i
\delta b_{g,i}
δbg,i的雅克比矩阵,记作
∂
△
R
~
i
j
∂
b
g
,
i
\frac{\partial \bigtriangleup \tilde{R} _{ij}}{\partial b_{g,i}}
∂bg,i∂△R~ij
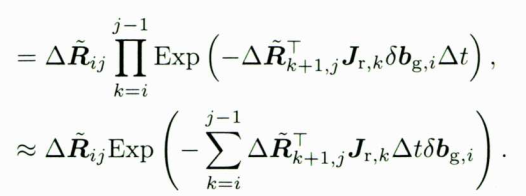
那么根据上式,可以显式地写出
为了方便计算,写出递推的形式
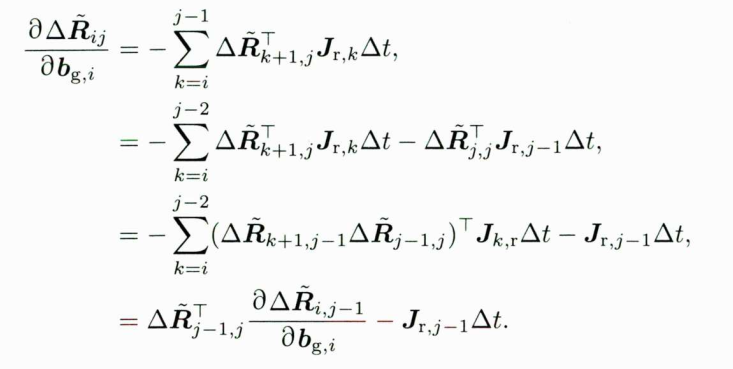
于是得到了如何将这个雅克比矩阵从j-1时刻递推到j时刻。
速度部分
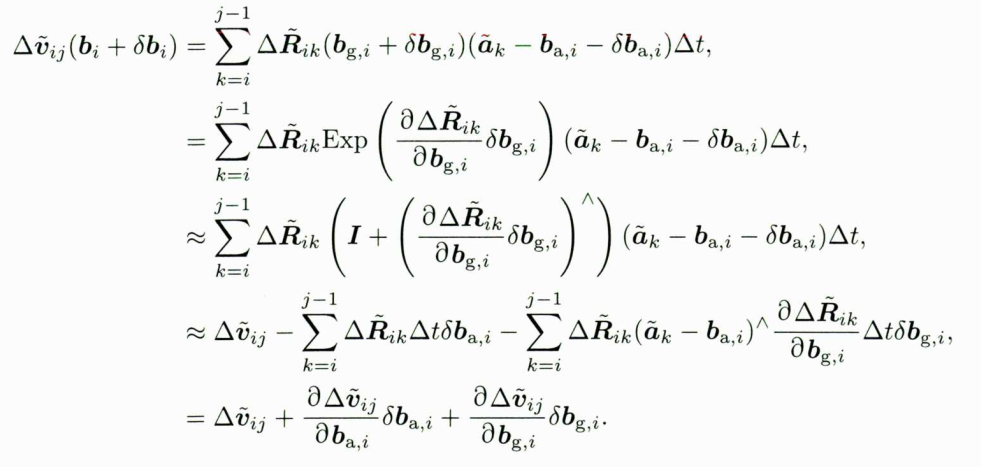
可见,速度相对于零偏的导数可以部分地由旋转导数的结果计算出来。
平移部分
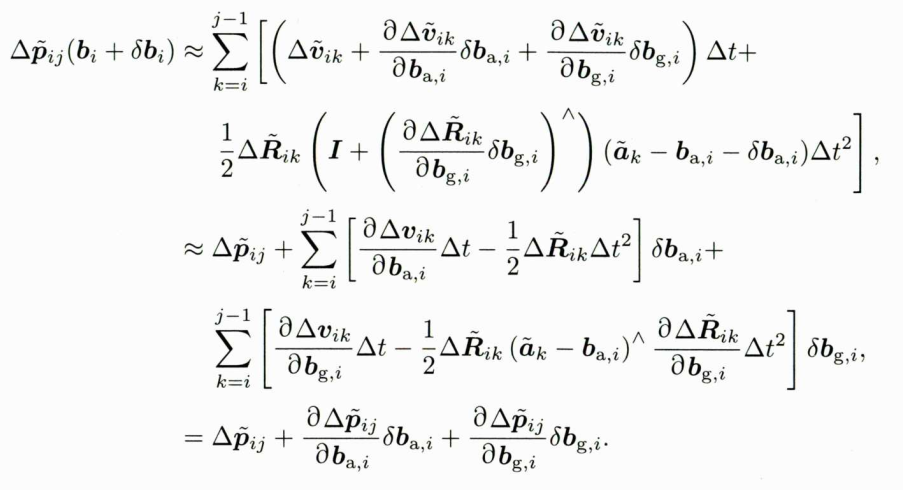
这样就算出了平移对两个零偏变量的雅克比矩阵。
总结
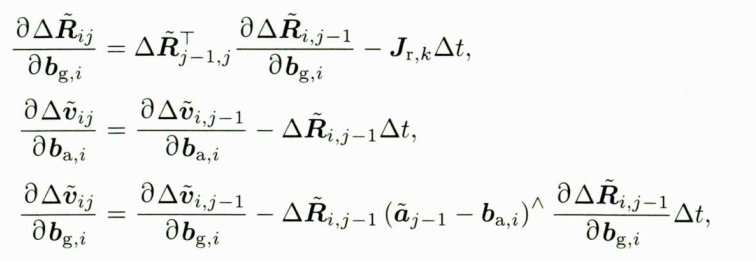
整理上面的雅克比矩阵,得到更整齐的结果
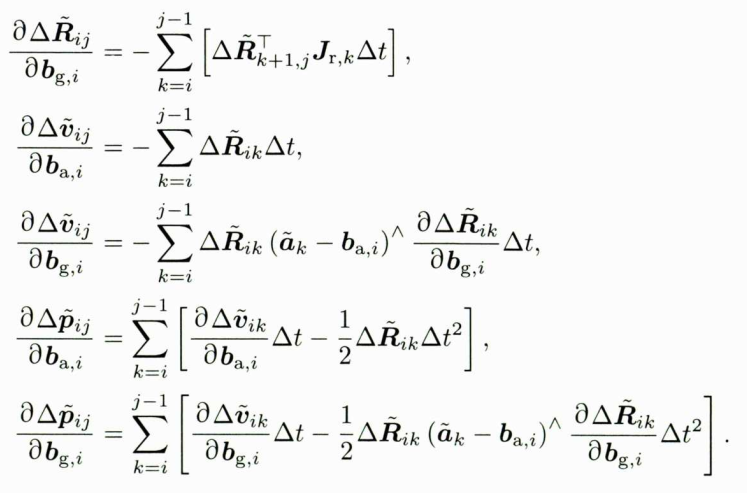
由于后面四种雅克比矩阵本身就是累加的,总结成递推形式




















 288
288

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











