







激光slam算法改进
一种适合大场景快速重定位的cartographer算法,在2万平方工厂中进行实验验证,实验结果表明:重定位耗时时间降低为秒级
大场景重定位是使用cartograper定位时常见的应用情况,一般的会采用二维码或人工提供初始位置的方式进行局部重定位,这种方法对部署和运行有一定局限性,本文提供一种改进的方法,使用全局重定位在全图搜索,无需初始位置,并且进行效率提升在2万平场地可以实现秒级定位。
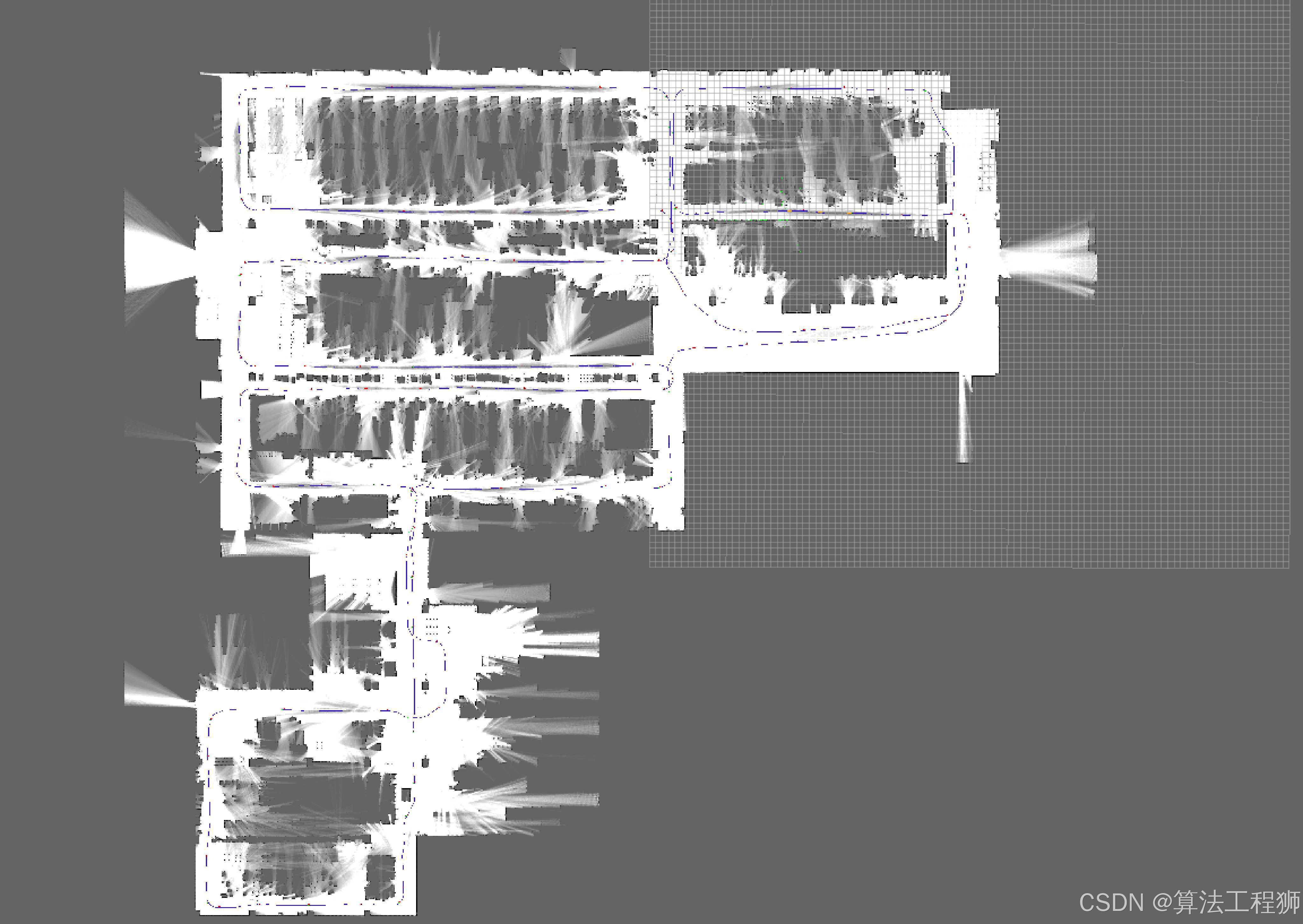
map
实验方法:
数据采集,采用多点位静止,在整个地图中随机选取 机选取 15个地点进行录制
定位实验,使用多个点位采集的激光数据包,以原点启动,标记每次重定位成功的时间
实验平台采用rk3588开发版 8GBram
上视频:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 4341
4341

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









