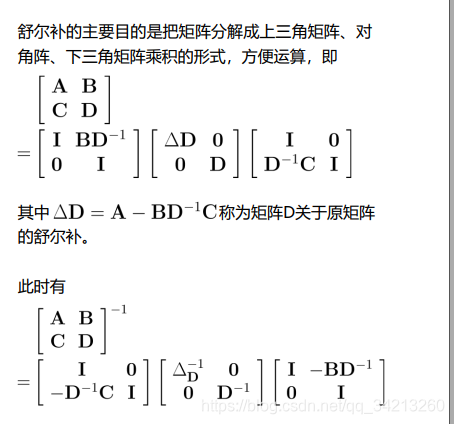
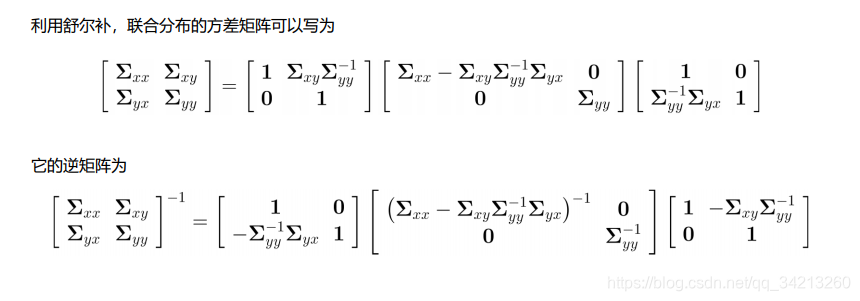
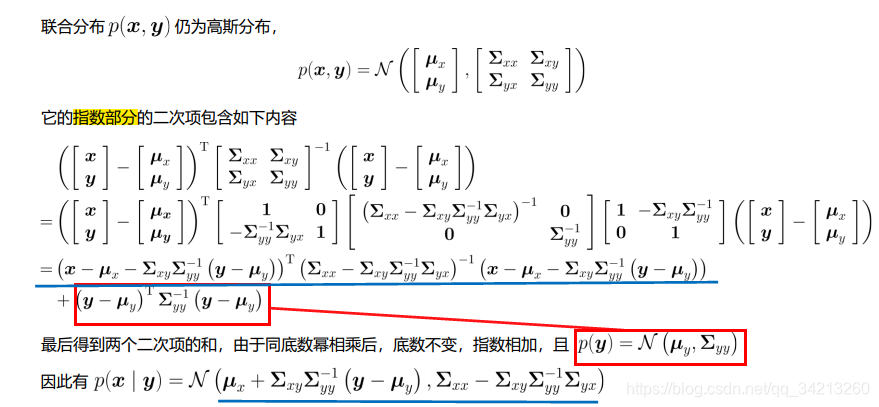
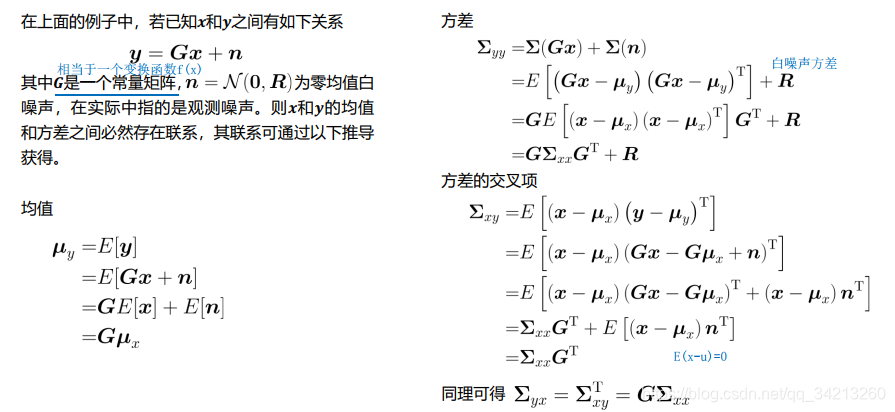
文章目录 一、高斯分布 1.1 高斯概率密度函数 1.2 联合高斯概率密度函数 1.3 高斯随机变量的线性变换 二、滤波器基本原理 2.1 贝叶斯滤波 三、卡尔曼滤波 3.1 普通卡尔曼滤波器 (KF) 3.2 扩展卡尔曼滤波(EKF) 3.3 迭代扩展卡尔曼滤波(IEKF) 3.4 无迹/无损卡尔曼滤波(UKF) 3.5 误差状态卡尔曼(ESKF) 如果对您有帮助,就打赏一下吧O(∩_∩)O 一、高斯分布 1.1 高斯概率密度函数 一维情况下, 高斯概率密度函数表示为: 其中 μ \mu μ为均值, σ 2 \sigma^2 σ2为方差。 多维情况下, 高斯概率密度函数表示为 其中 μ \mu μ为均值, 方差为 Σ \Sigma Σ 。 1.2 联合高斯概率密度函数 这就是有名的贝叶斯推论 1.3 高斯随机变量的线性变换 二、滤波器基本原理 符号说明: x ˇ \check{\boldsymbol{x}} xˇ是预测(先验) x ^ \hat{\boldsymbol{x}}








 本文详细介绍了卡尔曼滤波的各类变体,包括普通卡尔曼滤波(KF)、扩展卡尔曼滤波(EKF)、迭代扩展卡尔曼滤波(IEKF)、无迹卡尔曼滤波(UKF)和误差状态卡尔曼滤波(ESKF),阐述了高斯分布、贝叶斯滤波原理,并解析了各种滤波器的核心计算过程。
本文详细介绍了卡尔曼滤波的各类变体,包括普通卡尔曼滤波(KF)、扩展卡尔曼滤波(EKF)、迭代扩展卡尔曼滤波(IEKF)、无迹卡尔曼滤波(UKF)和误差状态卡尔曼滤波(ESKF),阐述了高斯分布、贝叶斯滤波原理,并解析了各种滤波器的核心计算过程。



 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言



 1万+
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
1万+
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言






