







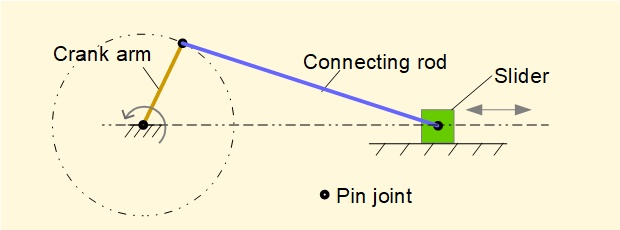
曲柄摇杆机构
参数定义
其中
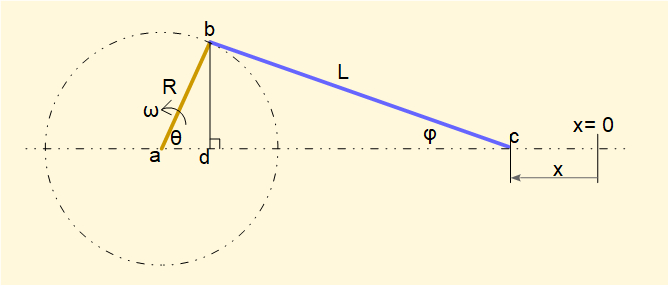
曲柄臂 ab 的长度为 R,以固定角速度 ω 约为旋转点 a 的方向逆时针旋转。其位置由曲柄角 θ 确定。
滑针连接点 c 被限制沿水平轴移动 x: 当曲柄角 θ = 0时 x = 0
Φ 是连杆 bc 和 x 轴之间的夹角,这个是未知的
点 d 是点 b 在垂直于 x 轴的交流直线上的投影。
滑块的行程x计算(正解)
w: 求出x关于角度 θ \theta θ 及连杆长度的变化关系。
很容易得到:x = (R + L) - (ad + dc) = (R + L} - (R.cos θ + L.cos φ) . (1)
cosφ 如何通过 θ \theta θ表达出来呢?
b d = R ⋅ sin ( θ ) = L ⋅ sin ( ϕ ) t h u s sin ( ϕ ) = R L sin ( θ ) b d=R \cdot \sin (\theta)=L \cdot \sin (\phi) \quad thus \quad \sin (\phi)=\frac{R}{L} \sin (\theta) bd=R⋅sin(θ)=L⋅sin(ϕ)thussin(ϕ)=LRsin(θ)
L e t n = L R h e n c e sin ( ϕ ) = sin ( θ ) n Let \text { }n=\frac{L}{R}\ \\ hence \sin (\phi)=\frac{\sin (\theta)}{n} Let n=RL hencesin(ϕ)=nsin(θ)
sin 2 ( ϕ ) + cos 2 ( ϕ ) = 1
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 649
649

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









