







1. 万向锁会带来什么危害?
最近看了很多万向锁的文章,大家都集中于讲述万向锁的成因,最后都会加上句“导致缺失一个方向的自由度”,但是万向锁现象到底会给实际工作带来什么问题?具体点,万向锁会给姿态解算带来什么问题?以INS为例,当pitch变为90°后,出现了万向锁现象,会带来的问题是:导致无法解算出heading,roll,此时旋转矩阵为
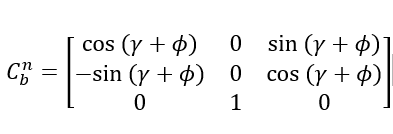
导致只能解出来heading+roll,而无法单独求出来其中每个角度。
2. 欧拉角、旋转矩阵的缺点到底在哪?
一是会遇到万向锁问题,以前右下坐标系为例,惯导算法中之所以取Z-Y-X的顺序定义欧拉角,就是想尽可能的避免万向锁现象(实际中载体出现俯仰角为90度的情况很少);二是插值会有问题,如果载体在某时段内从横滚角从170变到了190,但因为横滚角的范围限制,190度将被转换为-170度,此时插值中间时刻的横滚角将得到与实际不相符的现象。
3. 四元数如何实际用于控制?
当俯仰角等于正负90度时,欧拉角表示将会产生歧义性(一组姿态对应无数组欧拉角),而此时四元数仍能被唯一的表示。但是拿到四元数,怎么用于实际的控制?欧拉角用于控制很容易想到是怎么回事,四元数感觉有点抽象?
可参考:https://zhuanlan.zhihu.com/p/51323999,用三个分量的轴角进行控制。

















 1134
1134

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









