







时隔好久,又来写文章了,这次有高人指点,要系统的学习一下无人驾驶了。
使用的是易咖的底盘车,工控机是米文动力Apex Xavier II+,基于autoware框架
首先是在工控机上安装autoware,工控是ubuntu18环境。
参考教程
【Autoware】Autoware安装教程_Kin__Zhang的博客-CSDN博客
本人暂时先不使用cuda,按照教材创建文件夹,将autoware.ai.repos中的内容替换为参考链接中的gitee(本人开始一条条的下载,这是不对的)然后下载安装依赖
安装ros推荐使用鱼香ros的一键安装,本人之前电脑都是参照官方教程(因为可以科学上网)
按照参考连接,一步步安装即可,到编译时就会各种bug,好多bug没有来得及记录(前期安装了一半去搞别的东西了,现在搞完重新回来继续安装了),小bug直接度娘解决,
opencv路径会出现问题要求,下面这篇文章有帮助我解决路径问题,可以参考
本人下载了opencv放在home下,然后把上面教程中修改的地方改为本人的home/opencv路径
缺包问题好解决,对应下载就可以;暂时只能回忆起来这些了。
有点抓马,好久不用了,今天一编译成功了,可能之前把bug都搞完了,没注意
Finished <<< op_simulation_package [3min 5s]
Summary: 157 packages finished [8min 10s]
5 packages had stderr output: dp_planner lidar_kf_contour_track op_simulation_package op_utilities way_planner
下一步下载bag包并运行(米文空间不足了)暂时没有解压bag包
运行出现界面,
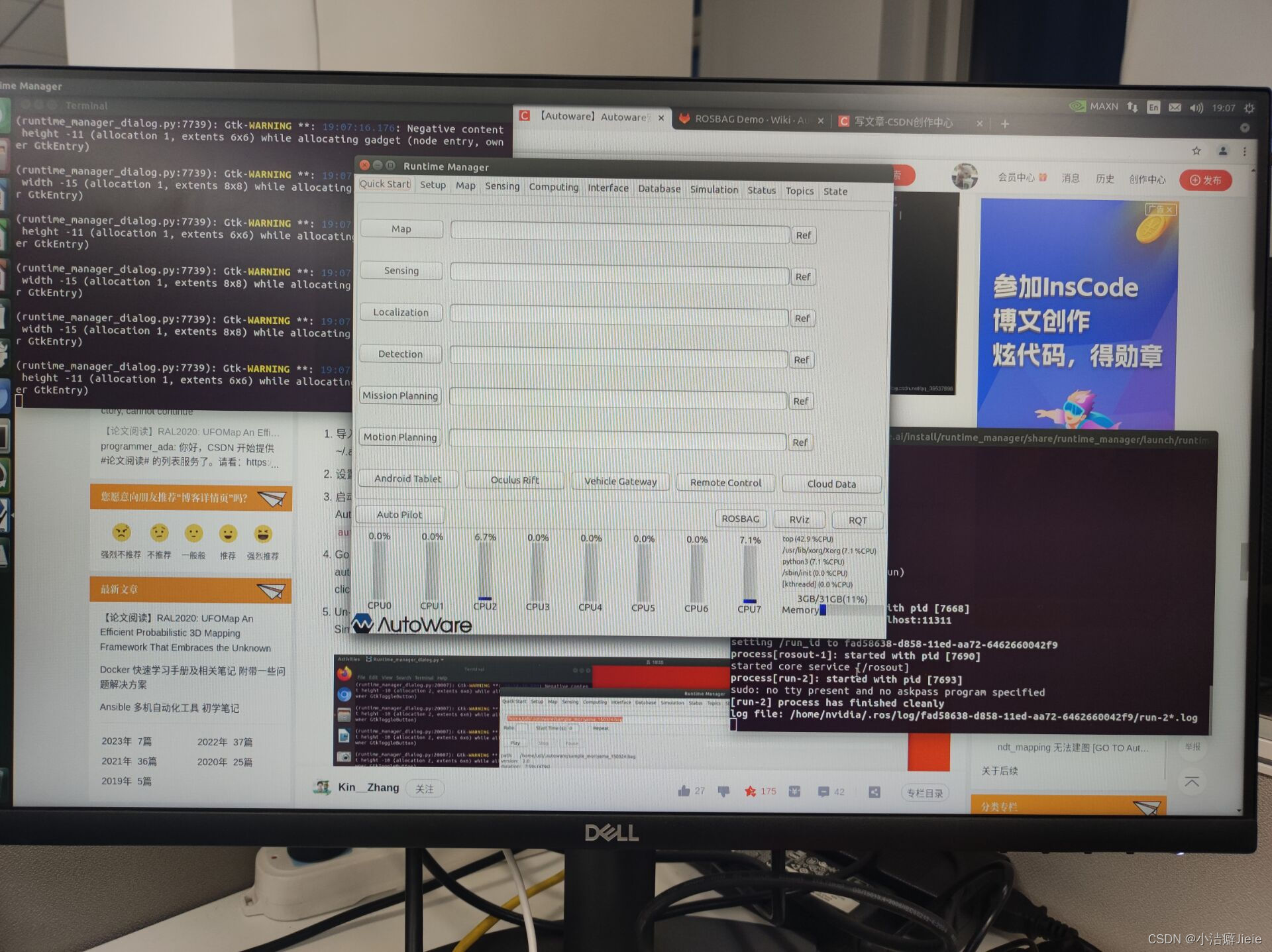
教程提供的bag包是为了演示效果,可以自己录制bag查看效果,后续使用autoware操作参考下方链接:
Autoware 1.12学习整理--01--运行rosbag示例_张余恒的博客-CSDN博客
安装教程在放几个参考链接,指导老师推荐的,但是本人没有测试过:
ubuntu18.04安装autoware1.12+opencv2.4.13_tudou880306的博客-CSDN博客
工控机(arm + ubuntu18.04)搭建Autoware 1.14环境以及源码编译(GPU版)详细步骤外加官方demo运行-CSDN博客
安装完成后就可以参考张余恒的教程依次加建图、定位、寻迹 。
因为使用的底盘不同,接下来先要和底盘通讯打通,本人较菜,要向搭档学习了,等我学会就写教程,这块主要与ros与底盘通讯相关,可以使用ros与can分析仪配合,也可以使用roscanopen















 2044
2044











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









