






如何理解joint和link
可以先记住link是连接,引申为连接杆,或其他可见的被连接起来的组件,一定是看得见摸得着的实体;
joint可以理解为两个link之间的关节,但他是抽象出来的,并不是实体,更像是一种属性。
link子标签
理解可link是实体后,我们就可以对这个实体进行描述,一个实体可以从很多方面去描述,我们大致分为几类,
<visual>描述机器人link部分的外观参数,即肉眼观察到的
<inertial>描述link的惯性参数
<collision>描述link的碰撞属性
然后具体来看每一个的详细信息
visual视觉
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<box size="0.001 0.001 0.001" />
</geometry>
<material name="white">
<color rgba="1 1 1 0.9"/>
</material>
</visual>
origin指几何中心,xyz即中心坐标(距离原点距离,单位米),rpy分别对应roll横滚角(绕x),pitch俯仰角(绕y),yaw航向角(绕z)
geometry指几何形状,常见box立方体,sphere球体,cylinder圆柱体等,不同的形状有不同的几何描述,较为简单,不再赘述。
material指材料,通常就是描述颜色。
inertial惯性
<inertial>
<origin xyz="0.0 0 0"/>
<mass value="0.1" />
<inertia ixx="0.001" ixy="0.0" ixz="0.0"
iyy="0.001" iyz="0.0" izz="0.001" />
</inertial>
origin几何中心
mass质量
inertia表示一个3*3旋转惯性矩阵
球形惯性矩阵
<inertia ixx="${2*m*r*r/5}" ixy="0" ixz="0"
iyy="${2*m*r*r/5}" iyz="0"
izz="${2*m*r*r/5}" />
圆柱
<inertia ixx="${m*(3*r*r+h*h)/12}" ixy = "0" ixz = "0"
iyy="${m*(3*r*r+h*h)/12}" iyz = "0"
izz="${m*r*r/2}" />
长方体
<inertia ixx="${m*(h*h + l*l)/12}" ixy = "0" ixz = "0"
iyy="${m*(w*w + l*l)/12}" iyz= "0"
izz="${m*(w*w + h*h)/12}" />
texture纹理,根据文件决定
collision碰撞
<collision>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<cylinder length="3" radius="2"/>
</geometry>
</collision>
origin几何中心
geometry几何形状
joint子标签
joint就是两个连接物之间的关节,可以描述的属性并不多
<joint name="base_footprint_joint" type="continuous">
<origin xyz="0 0 ${wheel_radius}" rpy="0 0 0" />
<parent link="base_footprint"/>
<child link="base_link" />
<axis xyz="0 1 0"/>
</joint>
//type常见类型
continuous: 旋转关节,可以绕单轴无限旋转
revolute: 旋转关节,类似于 continues,但是有旋转角度限制
prismatic: 滑动关节,沿某一轴线移动的关节,有位置极限
planer: 平面关节,允许在平面正交方向上平移或旋转
floating: 浮动关节,允许进行平移、旋转运动
fixed: 固定关节,不允许运动的特殊关节
其中origin,parent,child标签是必选的。
origin
可以理解为向量,子link相对父link的位置为xyz,旋转关系为rpy,如图
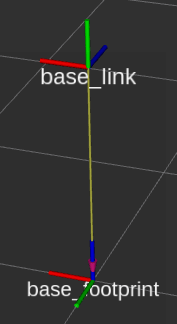
<origin xyz="0 0 1.0" rpy="0 1.57 0" />
base_link相对base_footprint在z轴方向移动了1.0个单位,然后又绕y轴顺时针旋转1.57弧度(90度)
参考文章
parent,child
连接的两个link,一个为父link,一个为子link,很好理解
axis
旋转轴,如果joint为可旋转类型,才有这个选项,这里说的是整个joint绕哪个轴旋转,跟origin标签的rpy不是一个东西,但也是类似的描述方法。
xacro
准确的说,xacro并不是urdf的语法,它更像是对urdf的拓展。
常见的用法有以下几种
- 定义常量
<xacro:property name="M_PI" value="3.14159"/>
用的时候用${}取值,也可以在${}中进行数学运算,这也是${}的一个作用
<origin xyz="0 0 0" rpy="${M_PI} 0 0" />
<origin xyz="0 0 0" rpy="${M_PI/2} 0 0" />
- 宏
虽然叫宏,但更像是函数,因为他可以传参,方便复用
<xacro:macro name="mrobot_standoff_2in" params="parent number x_loc y_loc z_loc">
<joint name="standoff_2in_${number}_joint" type="fixed">
<origin xyz="${x_loc} ${y_loc} ${z_loc}" rpy="0 0 0" />
<parent link="${parent}"/>
<child link="standoff_2in_${number}_link" />
</joint>
</xacro:macro>
以上定义可以理解为
mrobot_standoff_2in(parent,number,x_loc,y_loc,z_loc)
{.....}
用法
<mrobot_standoff_2in parent="base_link" number="1" x_loc="-${standoff_x/2 + 0.03}" y_loc="-${standoff_y - 0.03}" z_loc="${plate_height/2}"/>
<mrobot_standoff_2in parent="base_link" number="2" x_loc="-${standoff_x/2 + 0.03}" y_loc="${standoff_y - 0.03}" z_loc="${plate_height/2}"/>
<mrobot_standoff_2in parent="base_link" number="3" x_loc="${standoff_x/2}" y_loc="-${standoff_y}" z_loc="${plate_height/2}"/>
<mrobot_standoff_2in parent="base_link" number="4" x_loc="${standoff_x/2}" y_loc="${standoff_y}" z_loc="${plate_height/2}"/>
可以看到4个组件其实都是相似的,只有部分参数不同,所以可以用宏传参的方式来描述。
宏定义不能作为组件,必须被包含使用才能正确解析,例如你只定义了一个link的宏而没有使用,这会被解析为没有元素,好比函数仅定义而不调用。
- 文件包含
<xacro:include filename="$(find mrobot_description)/urdf/camera.xacro" />















 219
219











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









