







 这篇博客详细介绍了如何使用SolidWorks构建12自由度的机器狗模型,并着重强调了在装配和导出URDF模型时的注意事项,包括零件设计、坐标轴设置、插件使用、限制设置等。作者提醒在设计时每个零件只能出现一次,避免模型错位,同时指出了URDF模型姿态和装配视图的影响。此外,还分享了在ROS中使用Rviz验证模型的步骤,强调了Limit设置的重要性。
这篇博客详细介绍了如何使用SolidWorks构建12自由度的机器狗模型,并着重强调了在装配和导出URDF模型时的注意事项,包括零件设计、坐标轴设置、插件使用、限制设置等。作者提醒在设计时每个零件只能出现一次,避免模型错位,同时指出了URDF模型姿态和装配视图的影响。此外,还分享了在ROS中使用Rviz验证模型的步骤,强调了Limit设置的重要性。
首先一句,全是坑。。。
SoildWork构建模型——机器狗
SoildWork构建机器狗模型(12自由度),SoildWork(2018)的安装破解:操作教程
基本操作就是看B站吧,本人也不是学机械的,所以SoildWork也是学的皮毛;
不过说说,基本注意事项:
先定基准面——>绘制草图(完成)——>加特征(基本会凸,会裁就行了)然后是装备。
特别注意:sw_urdf_exporter 插件的bug(超坑),你在设计模型时,必须单独设计每一个零件,装配时,一个零件只能出现一次,不能重复,不然导出的urdf模型的零件是错位的,我就是这里死了9次。。。(这应该是插件不兼容的问题)
零件错乱图。。。。所以千万记住以上的注意事项。。。
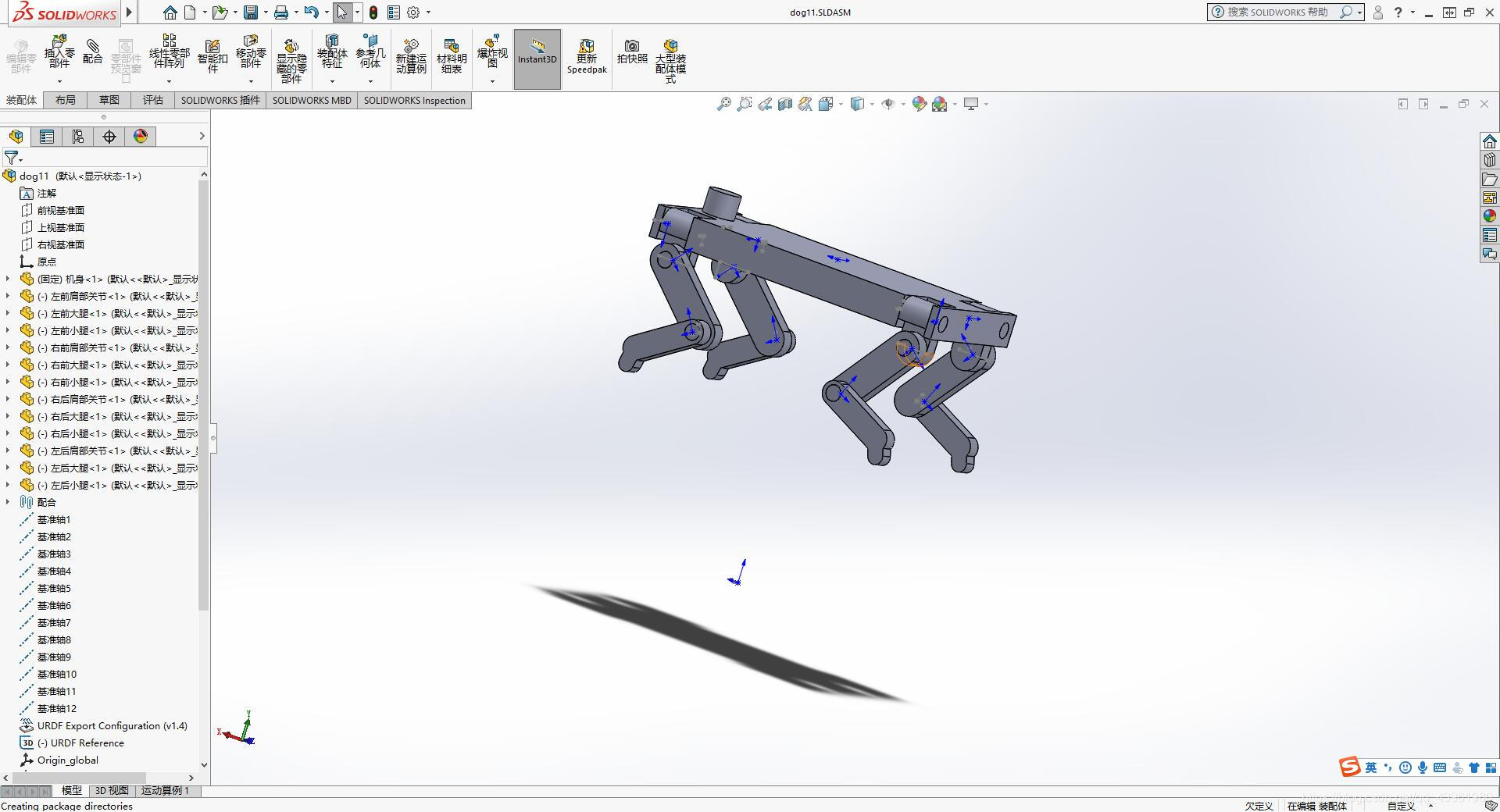
SoildWork设计的机器狗模型
注意事项2在装配图时,必须如上图所示那样模型底部是阴影的状态(我的是以上视图为基准面),这个又是影响urdf模型姿态的操作。如果不这样做,你会看到:

虽然,听说是可以通过改变Urdf文件来变得,但是本人确实urdf语言不会。。。所以还是先注意为妙。
SoildWork安装插件——sw_urdf_exporter
插件的下载:sw_urdf_exporter
安装的操作就是按照提示来就好,很简单。
安装好后,可以在SoildWork插件里面找到安装好的提示:

使用时,位置在:工具——>Tools——>Export as URDF
SoildWork导出操作
在使用插件时,必须在给关节的转轴处加参考的基准轴(重要)
然后进入插件界面:

首先选定base_link,Coordinate 是坐标系,这就选auto。。。自动添加
(可以自己提前设置好每一个零件的参考坐标系,但是如果要自己搞的话,请一定遵循DH坐标系的建立方法。)
(这个DH还是挺重要的,特别是机器人运动上)
下面是子link。。。

base_link作为父类,然后根据自己活动关节的情况子Link,和joint,Coordinate坐标轴(不会DH就选Auto。。),Axis基准轴(就是把前面说的需要给每个活动关节轴加基准轴,这里就用到了),Joint type 一般都是旋转(revolute),
如果不知道link 和Joint 的关系的,可以参考一下关系图,这是ROS中urdf模型构建的参考图:

全部加完后,再base_link下,点击Preview and Export。。。,然后等待加载,完成后会出现一个检测的界面。

这里还有一个需要主要的地方:
主要事项3:
需要对每一个link的 Limit 的 lower 设置为3.14 ,upper 设置为-3.14,不然在ROS中打开时,joint 的调节器会出错。
然后就是 Next ,到下一个界面, 然后没啥外观要求就,直接导,这里稍微说一下,如果是需要在ROS中使用的,最好选择导URDF and meshes。。。不然你用 launch 又要出错。
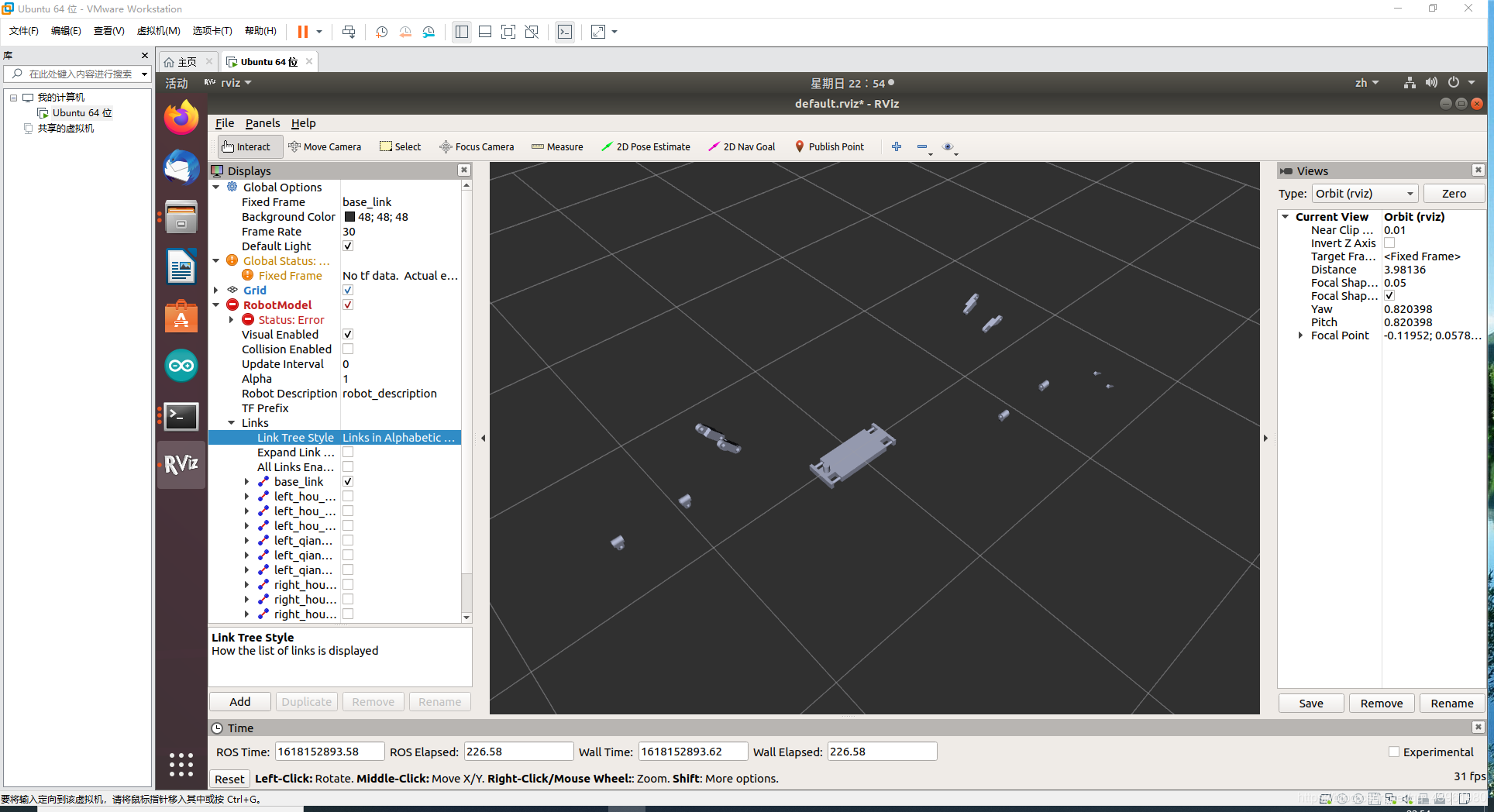
ROS的Rivz打开操作
准备完毕后,就是在Rize中打开来验证,Urdf模型正确不了。(前提是你的ROS编译环境配好了哈)
(1)将导出的整个文件,复制粘贴到 catkin_ws 文件夹的 src 文件下。
(2)打开roscore
(3)到catkin_ws下打开中断,先 catkin_make 一次 通过。
(4)启动 urdf 的 launch :
roslaunch dog11 display.launch
这里我的文件名为dog11 ,根据自己的变。
结果:

注意事项4:
启动后
(1)在Fixed Frame 选择 base_link,
(2)再 点击右下角 的 Add 按钮,找到RobotModel,才看的到。
有可能会有报错,比如Joint 的gui 没有(最常见), 解决方法就是,sudo apt-get install 。。。。
(就是没啥,我就下啥);


















 1250
1250

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











