






 本文介绍了如何在Ubuntu20.04上使用ROSNoetic环境克隆并初始化一个双臂示例项目,遇到的gitsubmodule相关问题以及控制器加载和PID设置错误的解决方法,重点展示了MoveIt!库在规划和执行机器人运动中的应用。
本文介绍了如何在Ubuntu20.04上使用ROSNoetic环境克隆并初始化一个双臂示例项目,遇到的gitsubmodule相关问题以及控制器加载和PID设置错误的解决方法,重点展示了MoveIt!库在规划和执行机器人运动中的应用。
rqt_graph

Nodes/Topics(All)

运行环境
Ubuntu 20.04 + ROS Noetic
安装过程
mkdir -p ~/dual_arm_ws/src
cd ~/dual_arm_ws/src
git clone https://github.com/bi3ri/dual_arm_demo.git
git submodule update --init --recursive
catkin build
echo “source ~/dual_arm_ws/devel/setup.bash” >> ~/.bashrc
问题 git submodule update --init --recursive
git submodule update --init --recursive是一个Git命令,用于初始化、更新并递归地检出一个仓库中的所有子模块。这个命令经常在克隆包含子模块的Git仓库之后使用,以确保仓库中所有子模块的代码也被正确地检出。下面是这个命令的组成部分的详细解释:
git submodule:这是操作Git子模块的命令。Git子模块允许你将一个Git仓库作为另一个Git仓库的子目录。
update:这个子命令用于更新子模块,以匹配在父仓库中记录的提交。
--init:这个选项用于初始化子模块。如果子模块尚未初始化(即,子模块的目录存在但为空),这个选项将会克隆子模块仓库到子模块目录并检出正确的提交。
--recursive:这个选项用于递归地更新每个子模块中的子模块。这意味着如果你的子模块内还包含其他子模块,这个命令也会初始化和更新这些嵌套的子模块。在实际应用中,如果你克隆了一个包含子模块的Git仓库,通常需要执行这个命令来确保所有相关的代码都被检出。这样做可以确保你能够获取到仓库依赖的特定版本的代码,这对于项目的构建和运行是必需的。
例如,如果有一个项目依赖于特定版本的库或其他项目,并且这些依赖项以子模块的形式包含在项目中,那么使用
git submodule update --init --recursive命令将确保所有的依赖项都处于正确的版本,从而使得项目能够正确构建和运行。
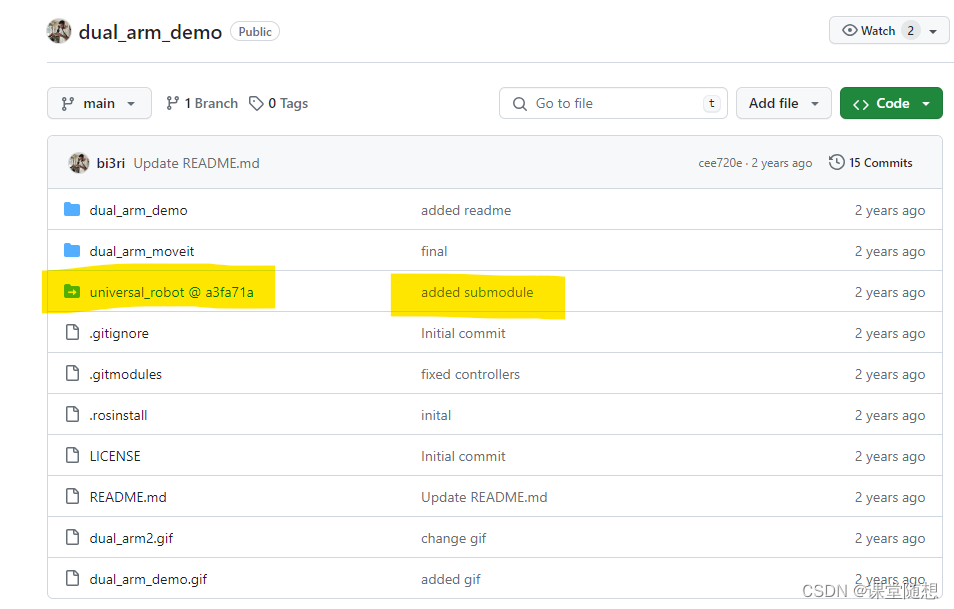
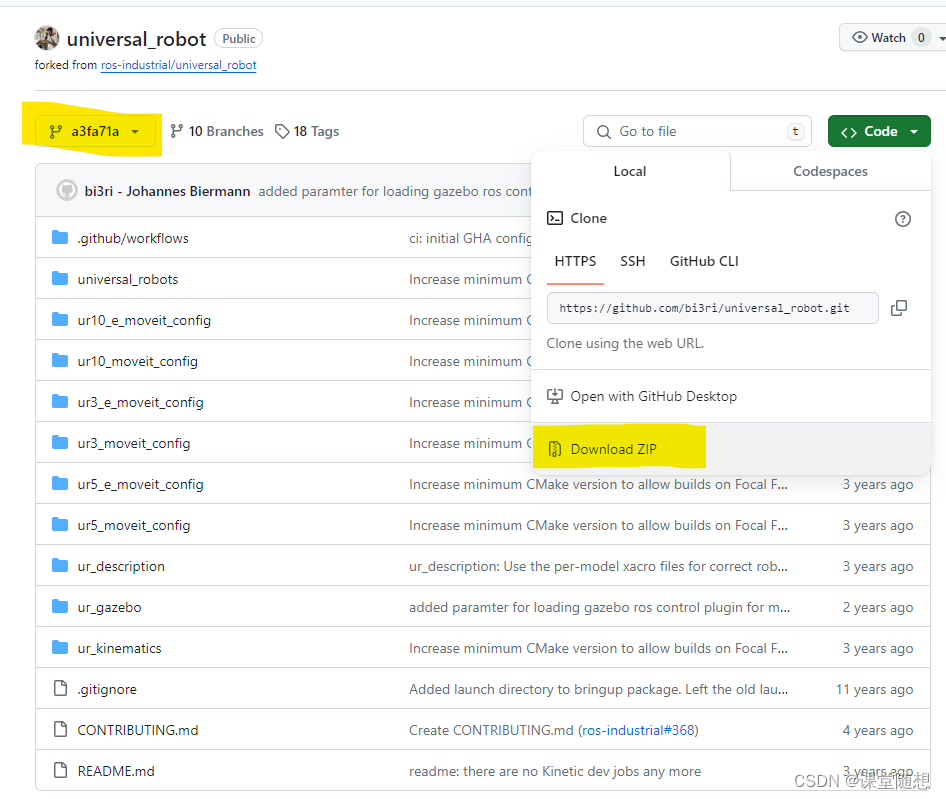
直接下载解压到本地目录~/dual_arm_ws/src/universal_robot
运行过程
#run in two shells
roslaunch dual_arm_demo app.launch
rosrun dual_arm_demo moveit_demo
问题 Could not load controller ‘groot_controller’ because controller type ‘position_controllers/JointTrajectoryController’ does not exist.
[ INFO] [1709604560.663736648]: Loaded gazebo_ros_control.
[ERROR] [1709604560.784316301]: Could not load controller ‘groot_controller’ because controller type ‘position_controllers/JointTrajectoryController’ does not exist.
[ERROR] [1709604560.784580083]: Use ‘rosservice call controller_manager/list_controller_types’ to get the available types
Error when loading ‘groot_controller’
[ERROR] [1709604560.800029009]: Could not start controller with name ‘groot_controller’ because no controller with this name exists
Error when starting [‘groot_controller’] and stopping []
[ERROR] [1709604560.840430337]: Could not load controller ‘rocket_controller’ because controller type ‘position_controllers/JointTrajectoryController’ does not exist.
[ERROR] [1709604560.840694830]: Use ‘rosservice call controller_manager/list_controller_types’ to get the available types
Error when loading ‘rocket_controller’
[ERROR] [1709604560.864294751]: Could not start controller with name ‘rocket_controller’ because no controller with this name exists
Error when starting [‘rocket_controller’] and stopping []
没有安装相应的ros控制软件包
sudo apt-get update
sudo apt-get install ros-noetic-joint-trajectory-controller
sudo apt-get install ros-noetic-position-controllers
sudo apt-get install ros-noetic-joint-state-controller
sudo apt-get install ros-noetic-effort-controllers
问题 No p gain specified for pid. Namespace: /gazebo_ros_control/pid_gains/rocket_shoulder_pan_joint
[ INFO] [1709604560.488654758]: Loading gazebo_ros_control plugin
[ INFO] [1709604560.490601643]: Starting gazebo_ros_control plugin in namespace: /
[ INFO] [1709604560.493038258]: gazebo_ros_control plugin is waiting for model URDF in parameter [robot_description] on the ROS param server.
[ERROR] [1709604560.635958183]: No p gain specified for pid. Namespace: /gazebo_ros_control/pid_gains/rocket_shoulder_pan_joint
[ERROR] [1709604560.637498902]: No p gain specified for pid. Namespace: /gazebo_ros_control/pid_gains/rocket_shoulder_lift_joint
[ERROR] [1709604560.637899467]: No p gain specified for pid. Namespace: /gazebo_ros_control/pid_gains/rocket_elbow_joint
[ERROR] [1709604560.638312231]: No p gain specified for pid. Namespace: /gazebo_ros_control/pid_gains/rocket_wrist_1_joint
[ERROR] [1709604560.639747672]: No p gain specified for pid. Namespace: /gazebo_ros_control/pid_gains/rocket_wrist_2_joint
[ERROR] [1709604560.640322101]: No p gain specified for pid. Namespace: /gazebo_ros_control/pid_gains/rocket_wrist_3_joint
[ERROR] [1709604560.641844206]: No p gain specified for pid. Namespace: /gazebo_ros_control/pid_gains/groot_shoulder_pan_joint
[ERROR] [1709604560.643445501]: No p gain specified for pid. Namespace: /gazebo_ros_control/pid_gains/groot_shoulder_lift_joint
[ERROR] [1709604560.654915671]: No p gain specified for pid. Namespace: /gazebo_ros_control/pid_gains/groot_elbow_joint
[ERROR] [1709604560.659061206]: No p gain specified for pid. Namespace: /gazebo_ros_control/pid_gains/groot_wrist_1_joint
[ERROR] [1709604560.660483962]: No p gain specified for pid. Namespace: /gazebo_ros_control/pid_gains/groot_wrist_2_joint
[ERROR] [1709604560.661047190]: No p gain specified for pid. Namespace: /gazebo_ros_control/pid_gains/groot_wrist_3_joint
记录
moveit_demo.cpp
MoveIt!库来进行机器人运动规划和执行。MoveIt!库提供了碰撞检测的功能,可以确保在规划和执行过程中不会发生碰撞。
moveit::planning_interface::PlanningSceneInterface planning_scene_interface;
创建PlanningSceneInterface实例,用于添加和管理规划场景。规划场景包括机器人、物体和环境,它是MoveIt!进行碰撞检测的基础。
#include <ros/ros.h>
#include <memory>
#include <moveit/moveit_cpp/moveit_cpp.h>
#include <moveit/moveit_cpp/planning_component.h>
#include <moveit/robot_state/conversions.h>
#include <geometry_msgs/PointStamped.h>
#include <moveit/planning_scene_interface/planning_scene_interface.h>
#include <moveit/move_group_interface/move_group_interface.h>
#include <stdlib.h>
#include <Eigen/Core>
#include <Eigen/Geometry>
#include <random>
int main(int argc, char** argv)
{
// 初始化ROS节点
ros::init(argc, argv, "moveit_demo");
// 创建异步ROS节点处理器
ros::AsyncSpinner spinner(8);
spinner.start();
// 定义关节值和MoveGroup接口实例
std::vector<double> joint_values;
moveit::planning_interface::MoveGroupInterface rng_group_interface("rocket_and_groot");
moveit::planning_interface::MoveGroupInterface rocket_group_interface("rocket");
moveit::planning_interface::MoveGroupInterface groot_group_interface("groot");
// 设置运动规划的相关参数
rng_group_interface.setMaxVelocityScalingFactor(1.0);
rng_group_interface.setMaxAccelerationScalingFactor(1.0);
rng_group_interface.setPlanningTime(15.0);
rng_group_interface.setNumPlanningAttempts(20.0);
// 获取机器人模型和当前机器人状态
moveit::core::RobotModelConstPtr kinematic_model = rocket_group_interface.getRobotModel();
moveit::core::RobotStatePtr kinematic_state = rng_group_interface.getCurrentState();
const moveit::core::JointModelGroup* rocket_joint_model_group = kinematic_model->getJointModelGroup("rocket");
const moveit::core::JointModelGroup* groot_joint_model_group = kinematic_model->getJointModelGroup("groot");
// 获取关节名称列表
const std::vector<std::string>& rocket_joint_names = rocket_joint_model_group->getVariableNames();
const std::vector<std::string>& groot_joint_names = groot_joint_model_group->getVariableNames();
std::vector<double> rocket_joint_values;
std::vector<double> groot_joint_values;
// 初始化随机数生成器
std::random_device rd;
std::mt19937 gen(rd());
std::uniform_int_distribution<> distr(-10, 10);
std::uniform_int_distribution<> rad_distr(-30, 30);
// 定义机器人姿态
geometry_msgs::Pose rocket_pose;
geometry_msgs::Pose groot_pose;
// 初始化机器人的四元数表示
Eigen::Quaternionf rocket_q = Eigen::Quaternionf(0.0044319521005895665 , -0.0018064082028716572, 0.714190127940822, -0.6999353940485185);
Eigen::Quaternionf groot_q = Eigen::Quaternionf(0.7171097271676862 , -0.6959453209354478, -0.029260144371181365, -0.02361341612136324);
// 循环尝试100次不同的姿态和位置
for(int i = 0; i < 100; i++){
// 生成随机的位置偏移量
float random_x = ((float)distr(gen)) * 0.01;
float random_y = ((float)distr(gen)) * 0.01;
float random_z = ((float)distr(gen)) * 0.01;
// 更新rocket和groot的位置
rocket_pose.position.x = -0.015463195119993365 + random_x;
rocket_pose.position.y = 0.02029402510664674 + random_y;
rocket_pose.position.z = 1.658157440477098 + random_z;
groot_pose.position.x = -0.01565011581780207 + random_x;
groot_pose.position.y = -0.019683543216663102 + random_y;
groot_pose.position.z = 1.657396455658871 + random_z;
// 生成随机的旋转角度
float x_rotation = rad_distr(gen) * 0.01;
float y_rotation = rad_distr(gen) * 0.01;
float z_rotation = rad_distr(gen) * 0.01;
// 对rocket和groot的四元数进行旋转
rocket_q = Eigen::AngleAxisf(x_rotation, Eigen::Vector3f::UnitX()) *
Eigen::AngleAxisf(y_rotation, Eigen::Vector3f::UnitY()) *
Eigen::AngleAxisf(z_rotation, Eigen::Vector3f::UnitZ()) *
rocket_q;
groot_q = Eigen::AngleAxisf(x_rotation, Eigen::Vector3f::UnitX()) *
Eigen::AngleAxisf(y_rotation, Eigen::Vector3f::UnitY()) *
Eigen::AngleAxisf(z_rotation, Eigen::Vector3f::UnitZ()) *
groot_q;
// 更新rocket和groot的姿态
rocket_pose.orientation.w = rocket_q.w();
rocket_pose.orientation.x = rocket_q.x();
rocket_pose.orientation.y = rocket_q.y();
rocket_pose.orientation.z = rocket_q.z();
groot_pose.orientation.w = groot_q.w();
groot_pose.orientation.x = groot_q.x();
groot_pose.orientation.y = groot_q.y();
groot_pose.orientation.z = groot_q.z();
// 设置逆向运动学解算的超时时间
double timeout = 0.1;
bool rocket_found_ik = kinematic_state->setFromIK(rocket_joint_model_group, rocket_pose, timeout);
bool groot_found_ik = kinematic_state->setFromIK(groot_joint_model_group, groot_pose, timeout);
// 判断是否成功找到逆向运动学解
if (rocket_found_ik && groot_found_ik)
{
// 复制关节角度信息
kinematic_state->copyJointGroupPositions(rocket_joint_model_group, rocket_joint_values);
kinematic_state->copyJointGroupPositions(groot_joint_model_group, groot_joint_values);
// 输出关节信息
for (std::size_t i = 0; i < rocket_joint_names.size(); ++i)
{
ROS_INFO("Joint %s: %f", rocket_joint_names[i].c_str(), rocket_joint_values[i]);
ROS_INFO("Joint %s: %f", groot_joint_names[i].c_str(), groot_joint_values[i]);
}
}
else
{
// 输出未找到逆向运动学解的信息
ROS_INFO("Did not find IK solution");
}
// 设置MoveGroup目标关节值
rng_group_interface.setJointValueTarget(rocket_joint_names, rocket_joint_values);
rng_group_interface.setJointValueTarget(groot_joint_names, groot_joint_values);
// 进行运动规划
moveit::planning_interface::MoveGroupInterface::Plan my_plan;
bool success = (rng_group_interface.plan(my_plan) == moveit::planning_interface::MoveItErrorCode::SUCCESS);
// 判断运动规划是否成功
if(!success){
ROS_INFO("Plan did not succeed");
}
// 执行规划的运动
rng_group_interface.execute(my_plan);
}
// 关闭ROS节点
ros::shutdown();
}















 896
896











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









