







三、P控制器
单纯的P控制器,能保证系统处于稳定的状态,但由于系统的特性,会造成系统有一定的稳态误差。
- 稳态误差:系统稳定值和参考值直接的差值。
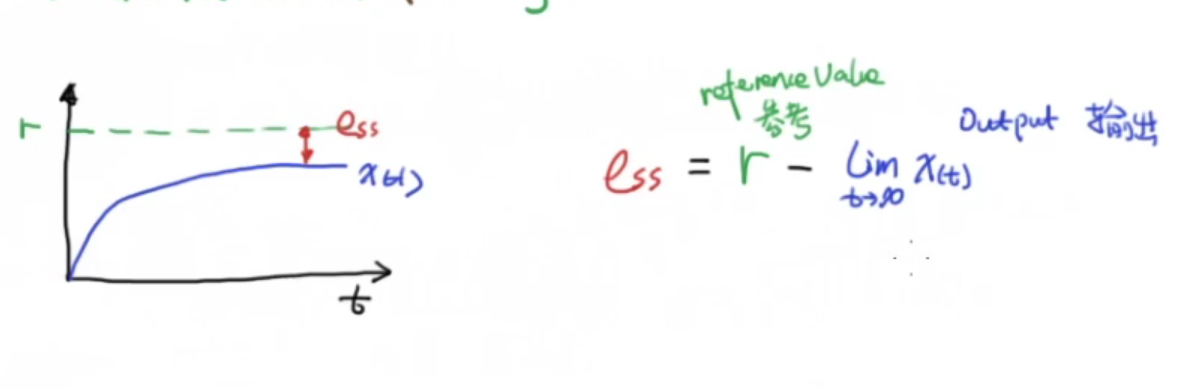
四、终值定理
终值定理是将求时域趋于无穷大的值转到求复频域趋于零的值一个方法:
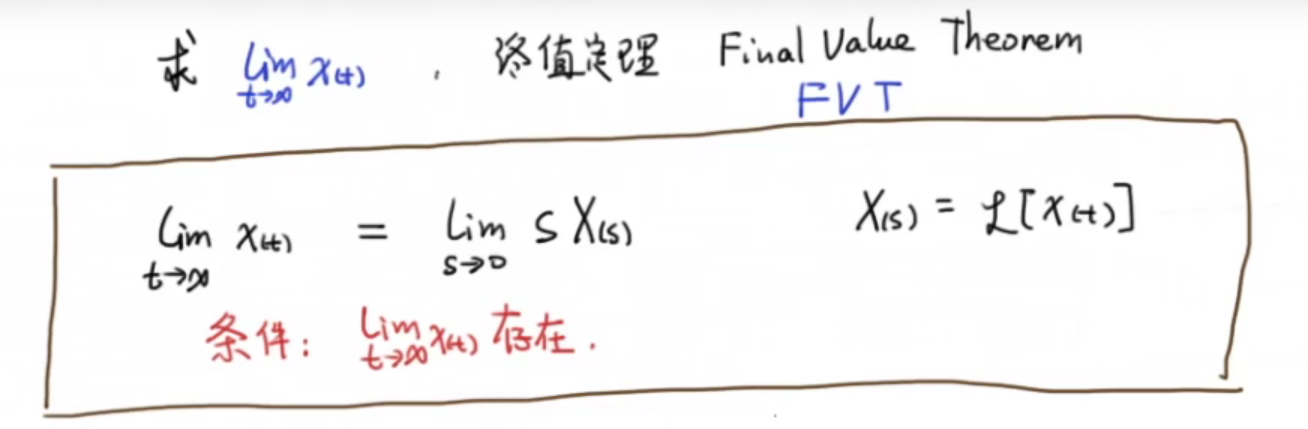
通过第二节我们知道一个系统要想稳定就要使极点分布于左半平面,这样的极点才能使传递函数在时域中随时间的增加,传递函数趋向于一个常数(而不是发散于无穷大)。所以要保证终止定理存在,即时域中趋向于无穷大的极限要存在,那么就要保证系统处于一个稳定的系统中。即所有的极点要位于左半平面,极点大小要小于零。
例如一下在一个弹簧的二阶系统中:
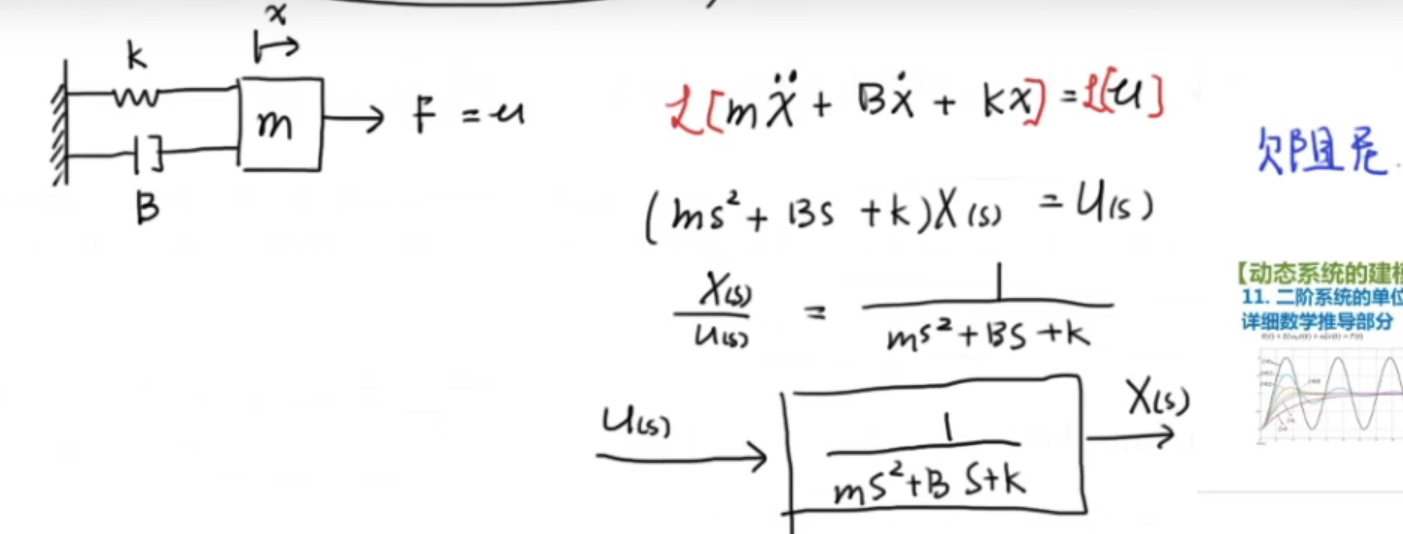
①当施加一个冲激的外力,相当于推一下这个物块:
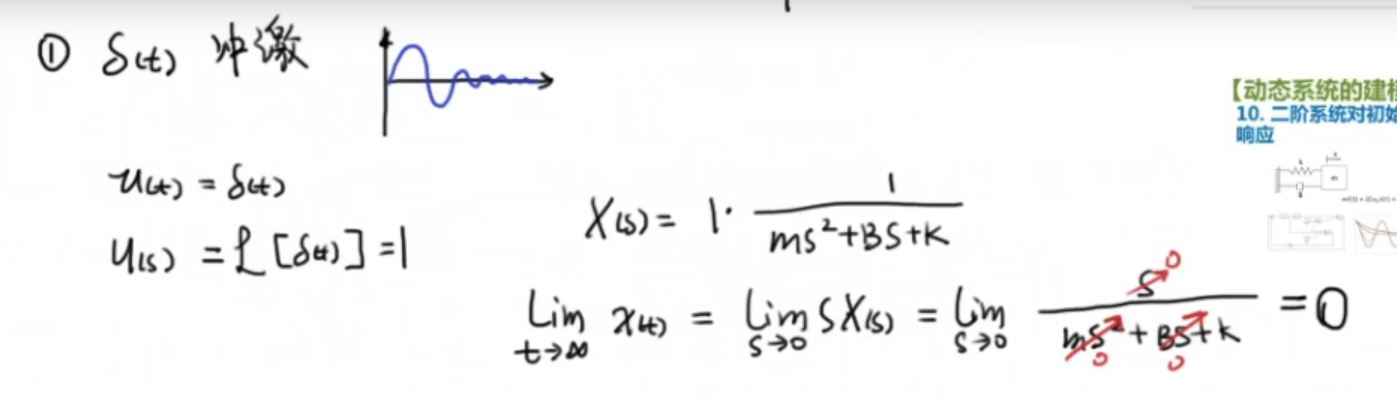
结合实际生活可以知道,当施加一个瞬时的外力,使系统产生作用,在经过弹力的作用下,系统将一步步恢复原状,那么使用终止定理同样可以得到如上结果,即终止为零。
我们来分析一下,为什么可以使用终止定理,首先撇开函数表达式,结合实际可以知道物块最终的状态是恢复原状。故系统稳定,所以可以使用终止定理。其次我们从数学定义上取分析,代入终止定理可以知道极限趋于0,极限存在所以可以使用终止定理。
②当施加一个持续的外力,结合高中物理的知识,相当于改变了系统的初始状态:
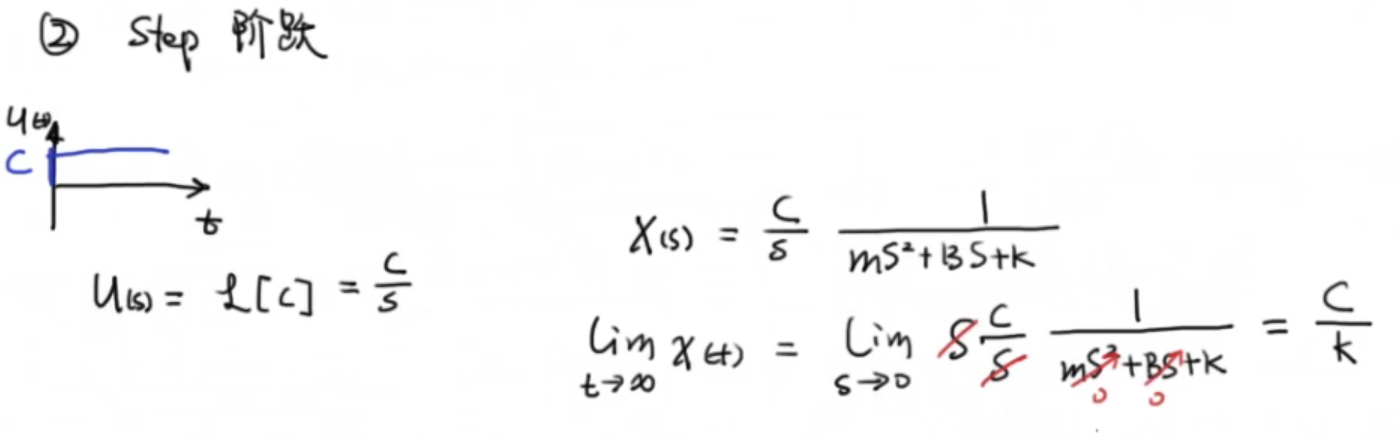
结合高中物理的知识,比如说高中物理中存在的等效重力加速度啥的,就是将一个常力和重力进行等效,将原有的垂直的重力和这个常力矢量叠加得到一个等效重力场。
那么在这个地方我们也可以通过这样的思想去看待这个问题,系统依然是稳定的,知识最终稳定的条件是通过等效后的稳定值,即由终值定理可以知道最终将稳定在C/K处。
通过上述分析,我们再来讨论一下,为什么只有比例控制的控制器会存在一定的稳态误差了。如下图:
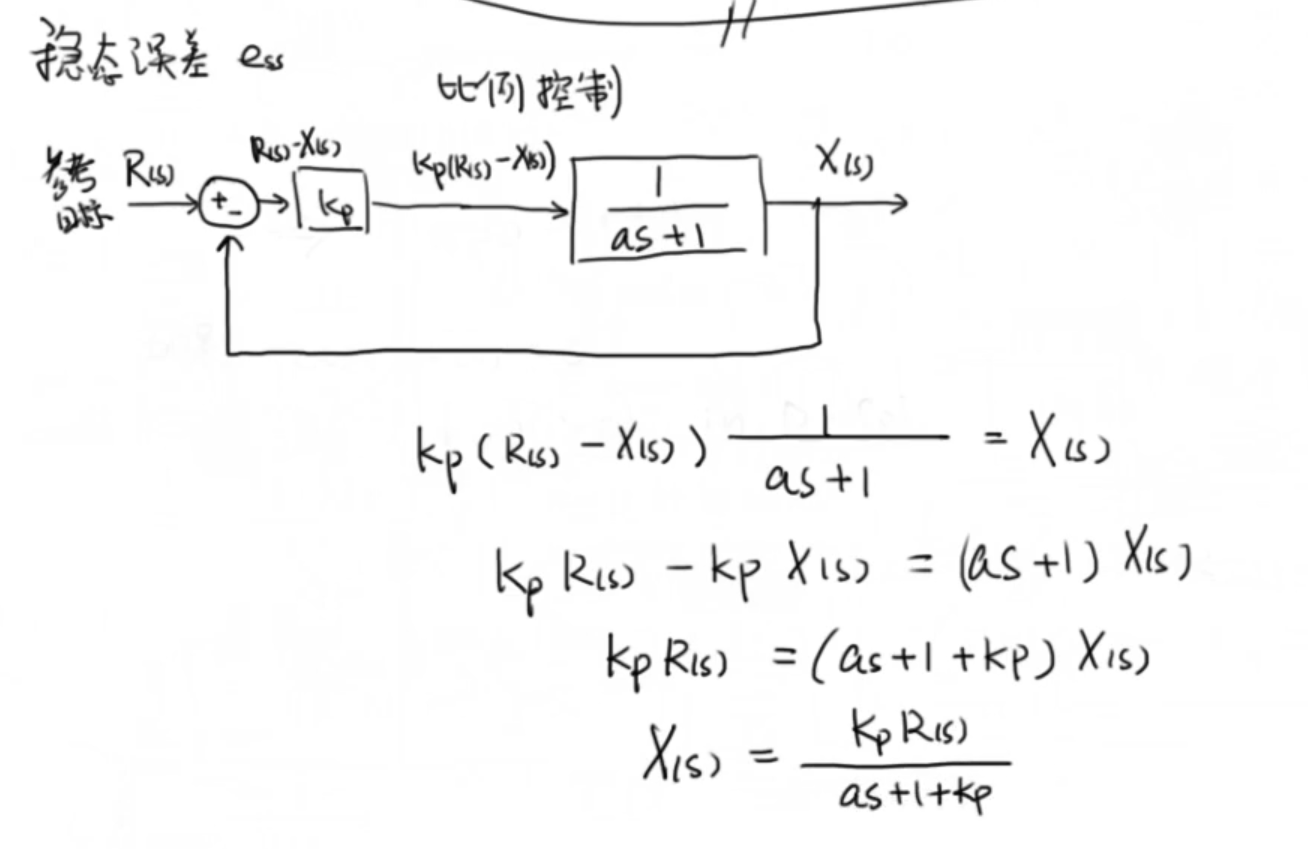
通过计算我们得到了输出=输入的状态方程,详细可以见第一节,使用方框图等效进行化简。
由终值定理的条件可以知道,要想使用终值定义,那么必须保证系统稳定,即极点都要小于零,那么就有如下计算:

得到极点<0的条件就是:Kp>-1,所以这是在使用终值定理的一个约束条件,先放这里。
当系统输入r(t) = r时(即参考值为r时),来看一下系统最终的输出是多少,如下图所示:
首先对输入参考值进行拉普拉斯变换。
由终值定理:
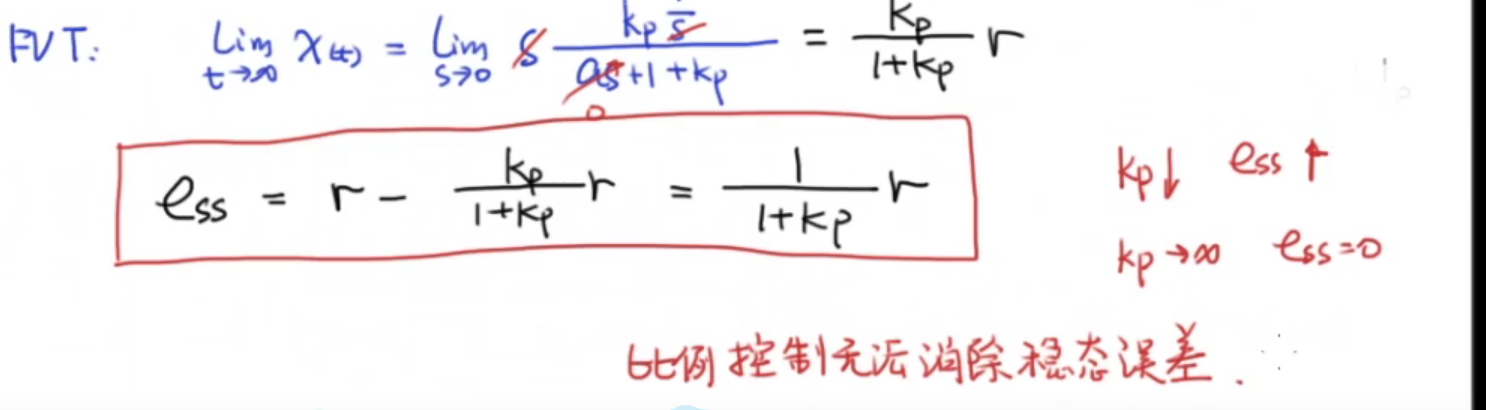
求的最后的输出值x(t)将稳定于:kpr/(1+Kp) < r,那么由稳态误差的定义可以知道Ess稳态误差的值为:r/(1+kp)
- Kp越大,稳态误差越小,但实际生活中Kp不能太大,有约束。
- Kp越小,稳态误差越大。
所以我们在实际生活中往往需要引入新的控制器配合比例控制。















 2645
2645











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









