







SLAM建模----Gmapping
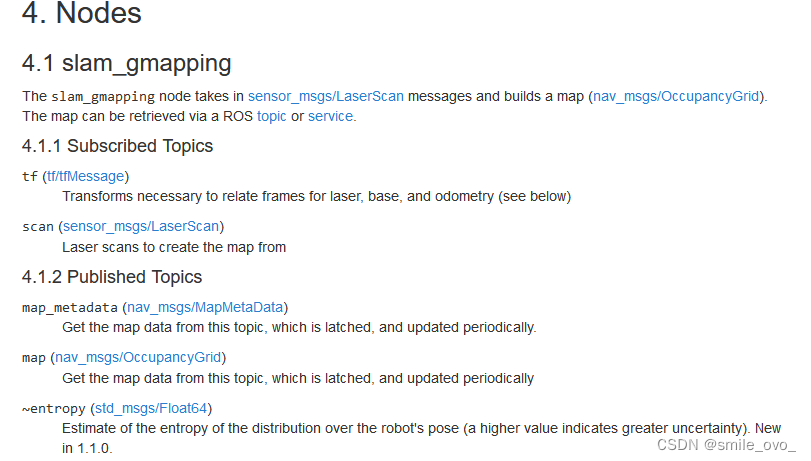
一、Gmapping消息
https://wiki.ros.org/gmapping

二、Gmapping使用
启动仿真模型
roslaunch wpr_simulation wpb_stage_robocup.launch
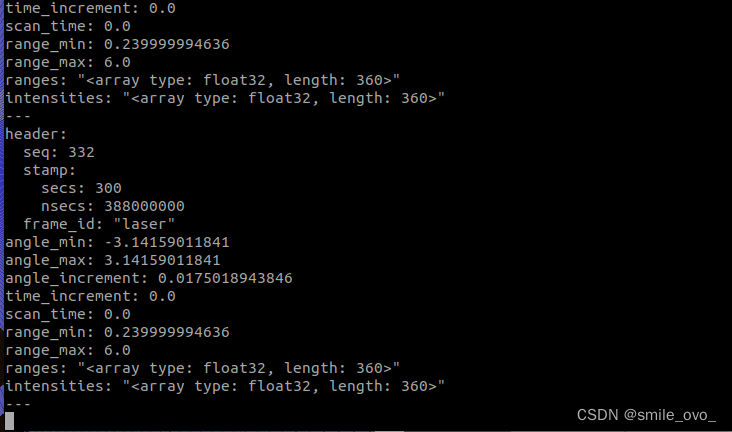
查看雷达坐标的frame_id
rostopic echo /scan --noarr
 gmaping 参数
gmaping 参数


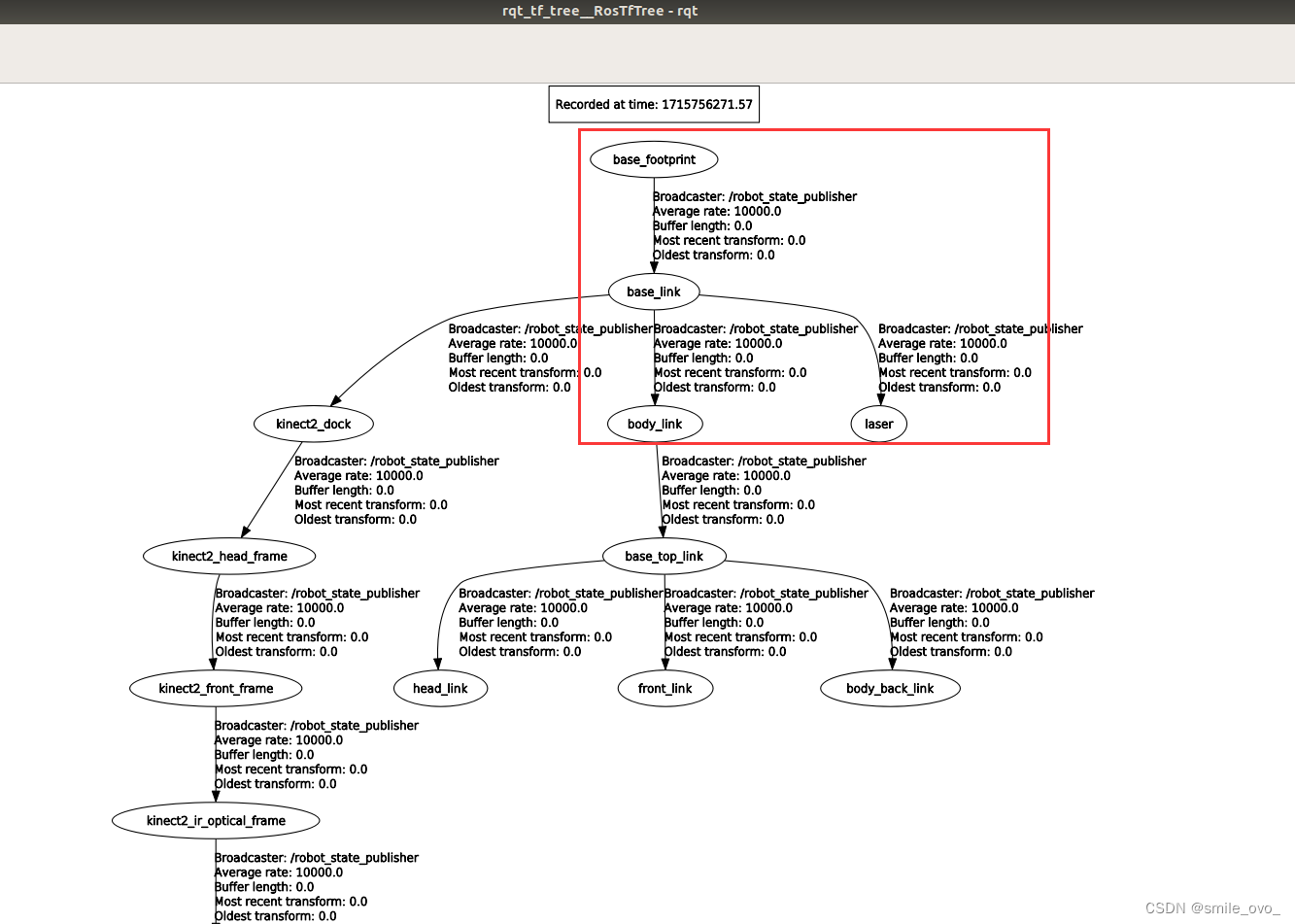
查看tf坐标系关系
rosrun rqt_tf_tree rqt_tf_tree
编写launch文件
<launch>
<!-- 载入 机器人 和 SLAM 的仿真场景 -->
<include file="$(find wpr_simulation)/launch/wpb_stage_robocup.launch"/>
<node pkg="gmapping" type="slam_gmapping" name="slam_gmapping"/>
<node pkg="rviz" type="rviz" name="rviz"/>
<node pkg="wpr_simulation" type="keyboard_vel_ctrl" name="keyboard_vel_ctrl"/>
</launch>
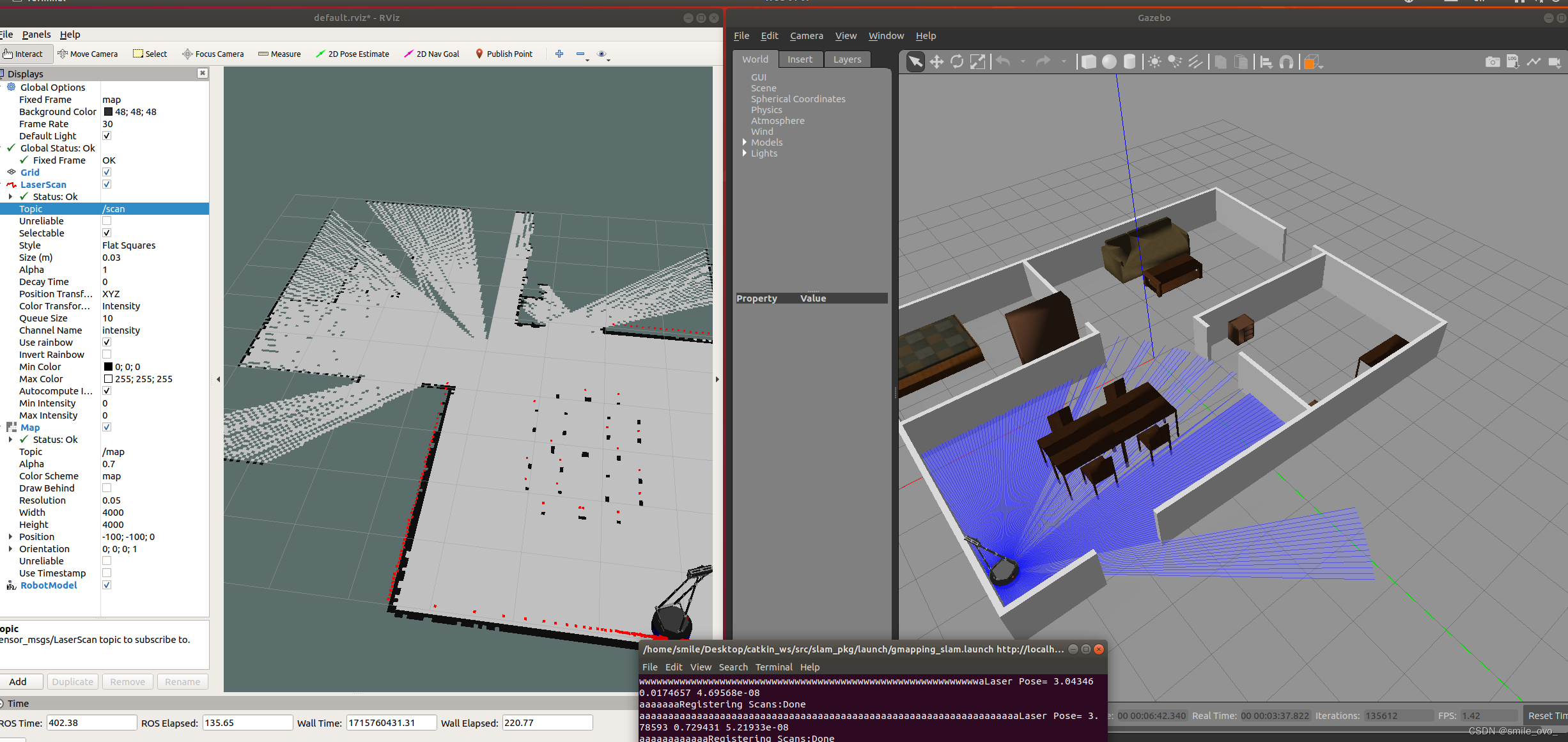
运行launch
roslaunch slam_pkg gmapping_slam.launch
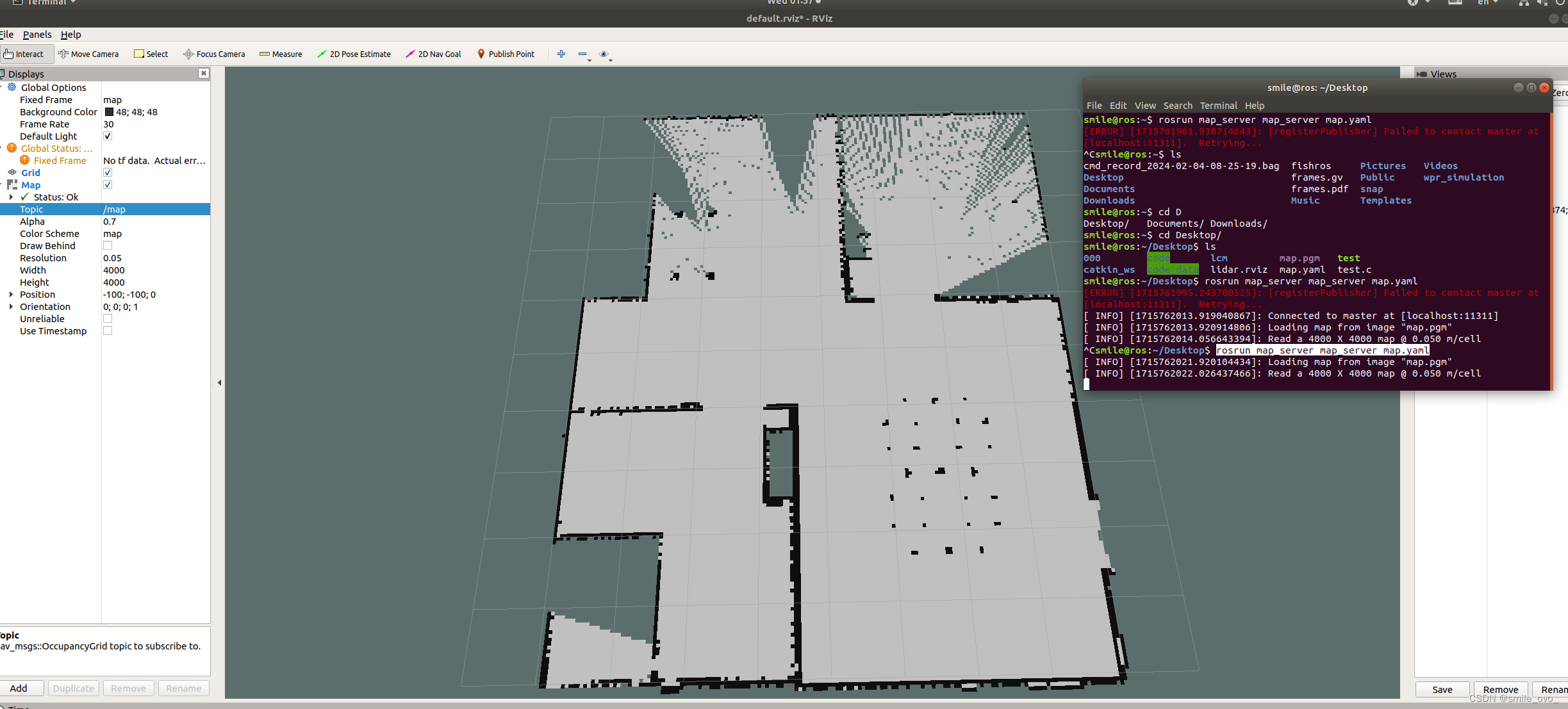
三、Map的保存与加载
rosrun map_server map_saver -f map
会生成map.yaml和map.pgm
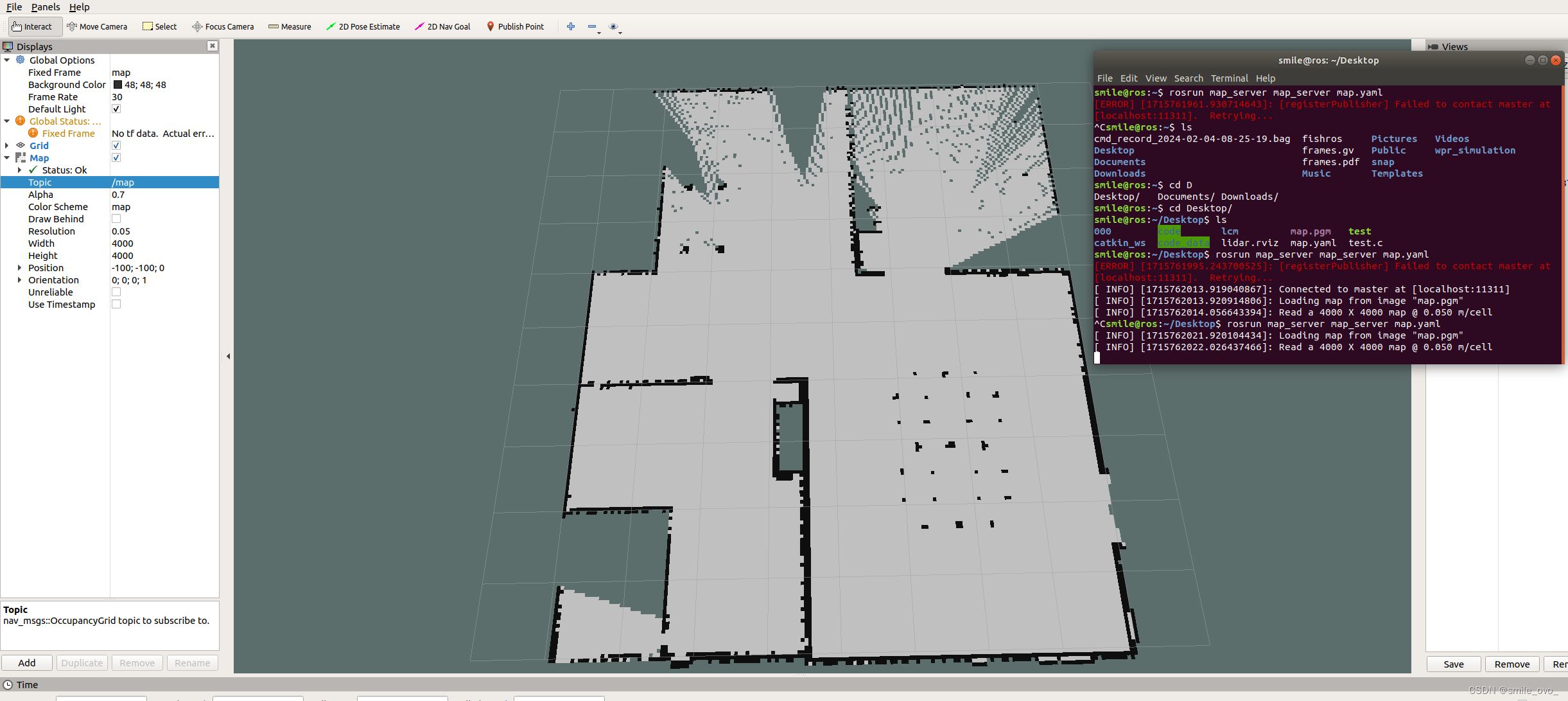
加载map
rosrun map_server map_server map.yaml















 3598
3598

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









