







 本文介绍了如何在ROSMelodic中安装和使用Hector_MappingSLAM功能包,包括通过launch文件启动并配置参数,以及栅格地图的生成过程。
本文介绍了如何在ROSMelodic中安装和使用Hector_MappingSLAM功能包,包括通过launch文件启动并配置参数,以及栅格地图的生成过程。
前言
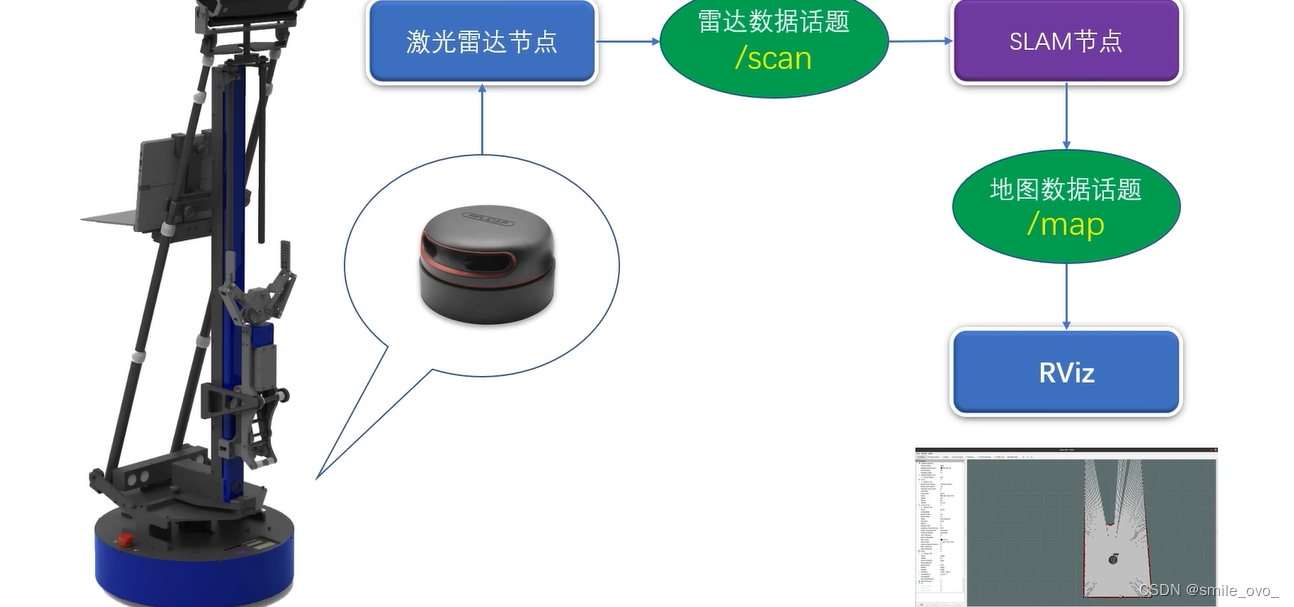
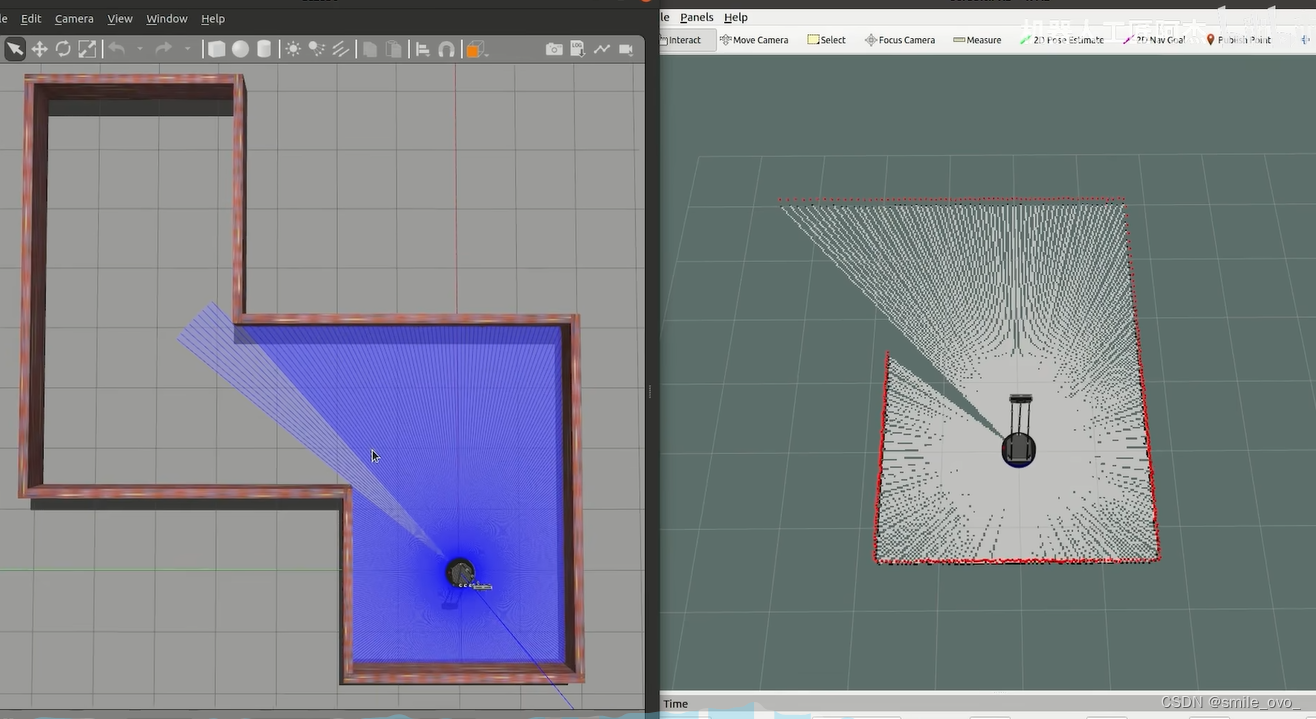
栅格地图是通过slam生成,slam主要是:定位与建图
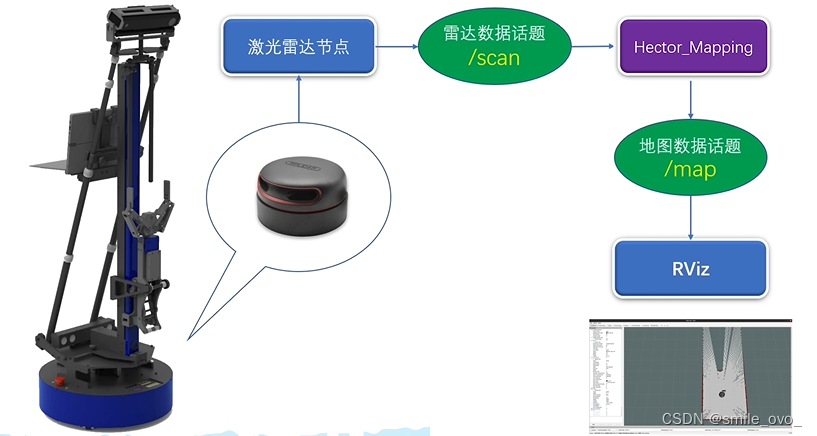
一、SLAM功能包Hector_Mapping
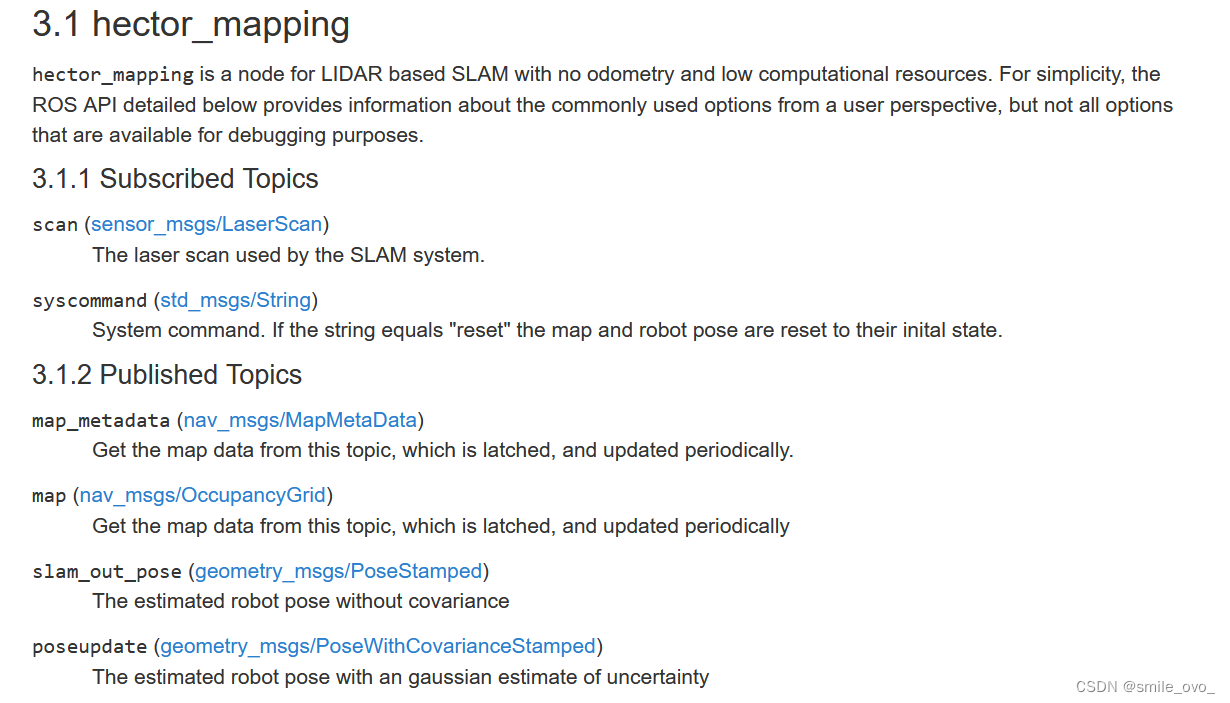
 在index.ros查看Hector_Mapping
在index.ros查看Hector_Mapping
http://wiki.ros.org/hector_mapping?distro=melodic
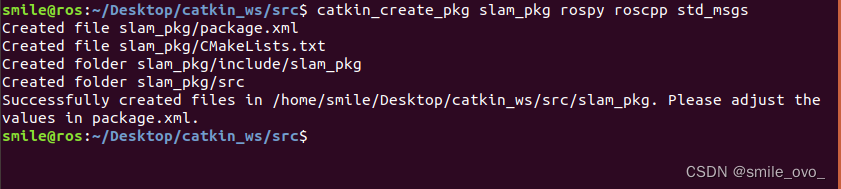
Hector_Mapping的安装
sudo apt install ros-melodic-hector-mapping
二、通过launch启动Hector_Mapping
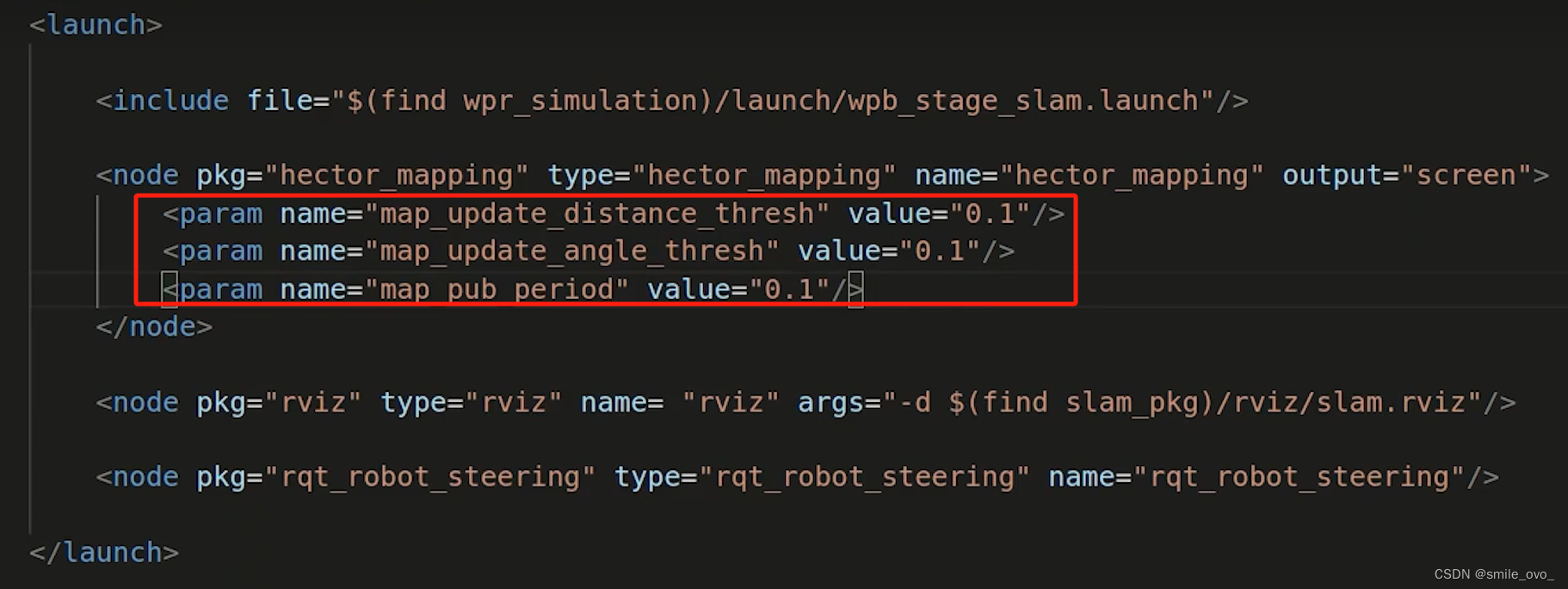
 编写launch文件
编写launch文件
<launch>
<!-- 载入 机器人 和 SLAM 的仿真场景 -->
<include file="$(find wpr_simulation)/launch/wpb_stage_slam.launch"/>
<!-- Hector SLAM -->
<node pkg="hector_mapping" type="hector_mapping" name="hector_mapping">
<param name="tf_map_scanmatch_transform_frame_name" value="base_footprint" />
</node>
<!-- Rviz 显示 -->
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find wpr_simulation)/rviz/slam.rviz"/>
<!-- 运动控制 -->
<node pkg="rqt_robot_steering" type="rqt_robot_steering" name="rqt_robot_steering"/>
</launch>
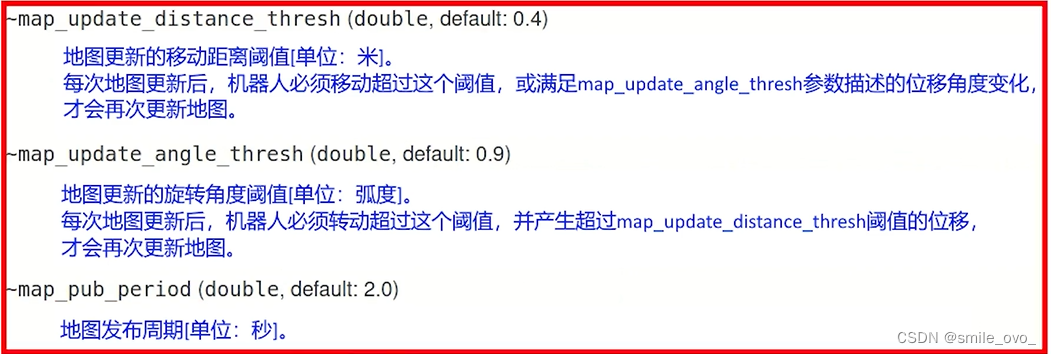
二、Hector_Mapping建图的参数设置

















 1020
1020

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









