









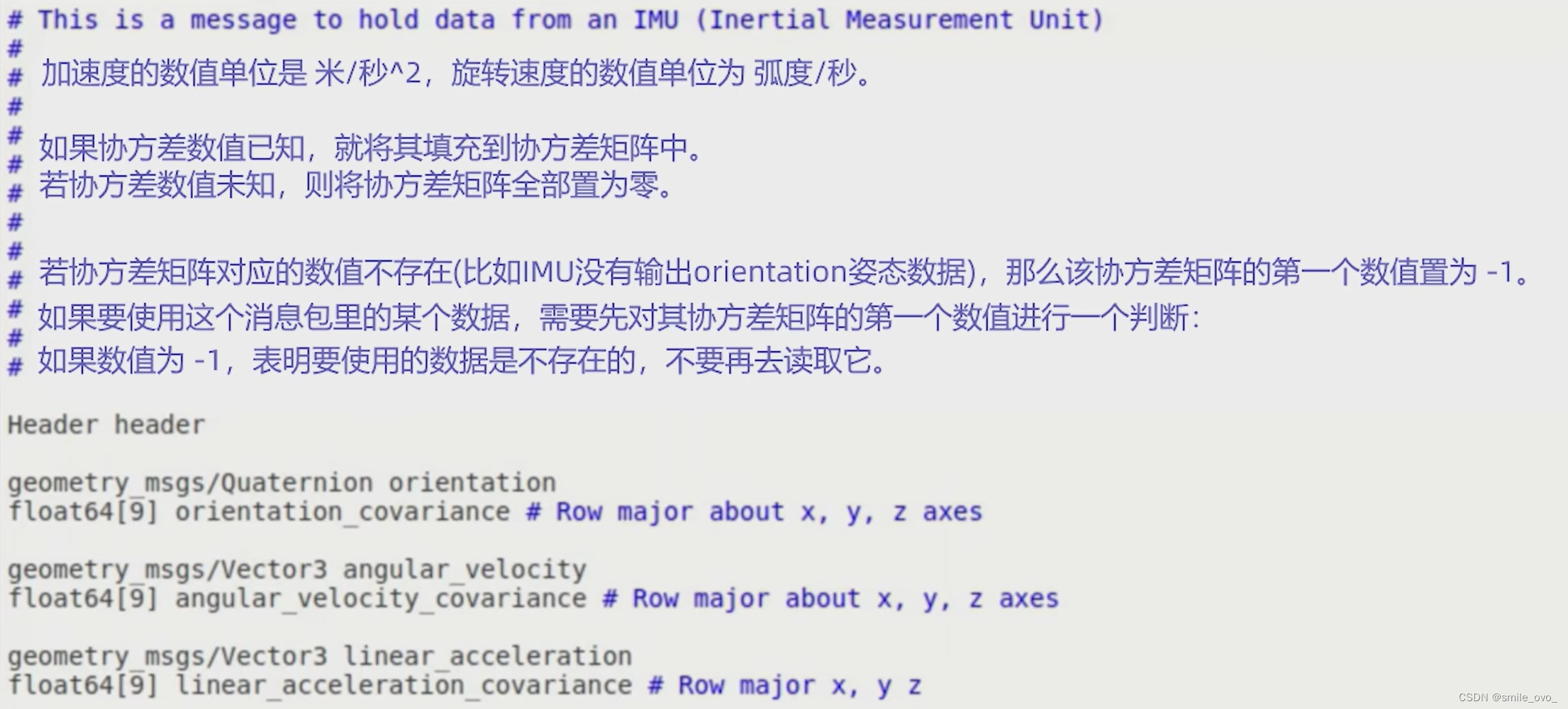
一、IMU消息包格式
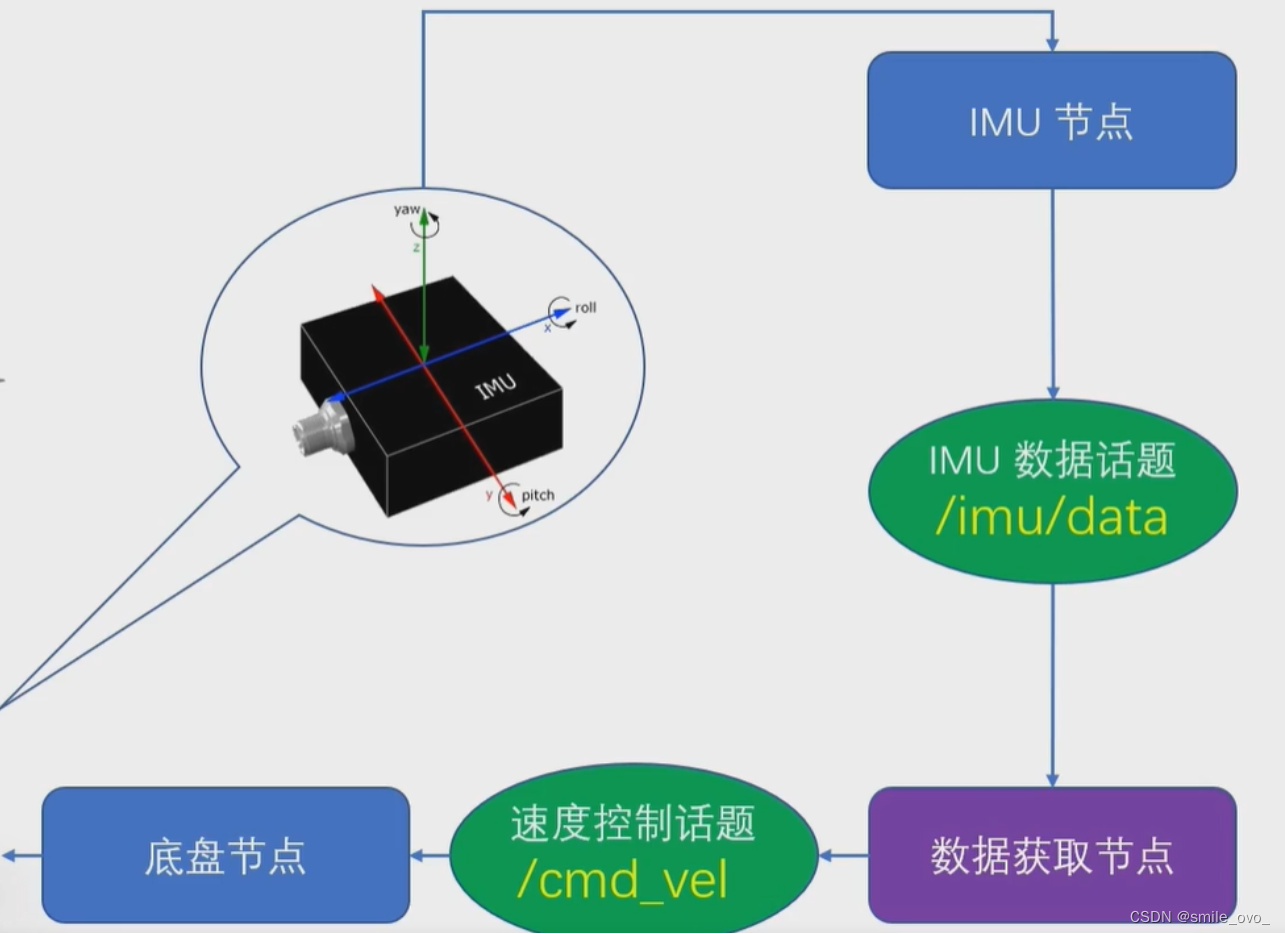
二、节点发布+订阅的应用:IMU航向锁定
 实现步骤
实现步骤
1、构建一个新的软件包,包名叫做imu_pkg
2、在软件包中新建一个节点,节点名叫做imu_node。
3、在节点中,向ROS大管家NodeHandle申请订阅话题/imu/data并设置回调函数为IMUCallback0)。
4、构建回调函数IMUCallback() ,用来接收和处理IMU数据
5、使用TF工具将四元数转换成欧拉角。
6、调用ROS_INFOO显示转换后的欧拉角数值
7、让大管家 NodeHandle 发布速度控制话题 /cmd_ve
8、设定一个目标朝向角,当姿态信息中的朝向角和目标朝向角不致时,控制机器人转向目标向角。
进入catkin_ws/src目录:
catkin_create_pkg imu_pkg rospy roscpp sensor_msgs
进入src目录创建imu_node.cpp
#include "ros/ros.h"
#include "sensor_msgs/Imu.h"
#include "tf/tf.h"
#include "geometry_msgs/Twist.h"
// 速度消息发布对象(全局变量)
ros::Publisher vel_pub;
// IMU 回调函数
void IMUCallback(const sensor_msgs::Imu msg)
{
// 检测消息包中四元数数据是否存在
if(msg.orientation_covariance[0] < 0)
return;
// 四元数转成欧拉角
tf::Quaternion quaternion(
msg.orientation.x,
msg.orientation.y,
msg.orientation.z,
msg.orientation.w
);
double roll, pitch, yaw;
tf::Matrix3x3(quaternion).getRPY(roll, pitch, yaw);
// 弧度换算成角度
roll = roll*180/M_PI;
pitch = pitch*180/M_PI;
yaw = yaw*180/M_PI;
ROS_INFO("滚转= %.0f 俯仰= %.0f 朝向= %.0f", roll, pitch, yaw);
// 速度消息包
geometry_msgs::Twist vel_cmd;
// 目标朝向角
double target_yaw = 90;
// 计算速度
double diff_angle = target_yaw - yaw;
vel_cmd.angular.z = diff_angle * 0.01;
vel_cmd.linear.x = 0.1;
vel_pub.publish(vel_cmd);
}
int main(int argc, char **argv)
{
setlocale(LC_ALL, "");
ros::init(argc,argv, "demo_imu_behavior");
ros::NodeHandle n;
// 订阅 IMU 的数据话题
ros::Subscriber sub = n.subscribe("imu/data", 100, IMUCallback);
// 发布速度控制话题
vel_pub = n.advertise<geometry_msgs::Twist>("/cmd_vel",10);
ros::spin();
return 0;
}
修改CMakeLists.txt
add_executable(imu_nodesrc/imu_node.cpp)
add_dependencies( imu_node${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
target_link_libraries(imu_node
${catkin_LIBRARIES}
)
编译运行
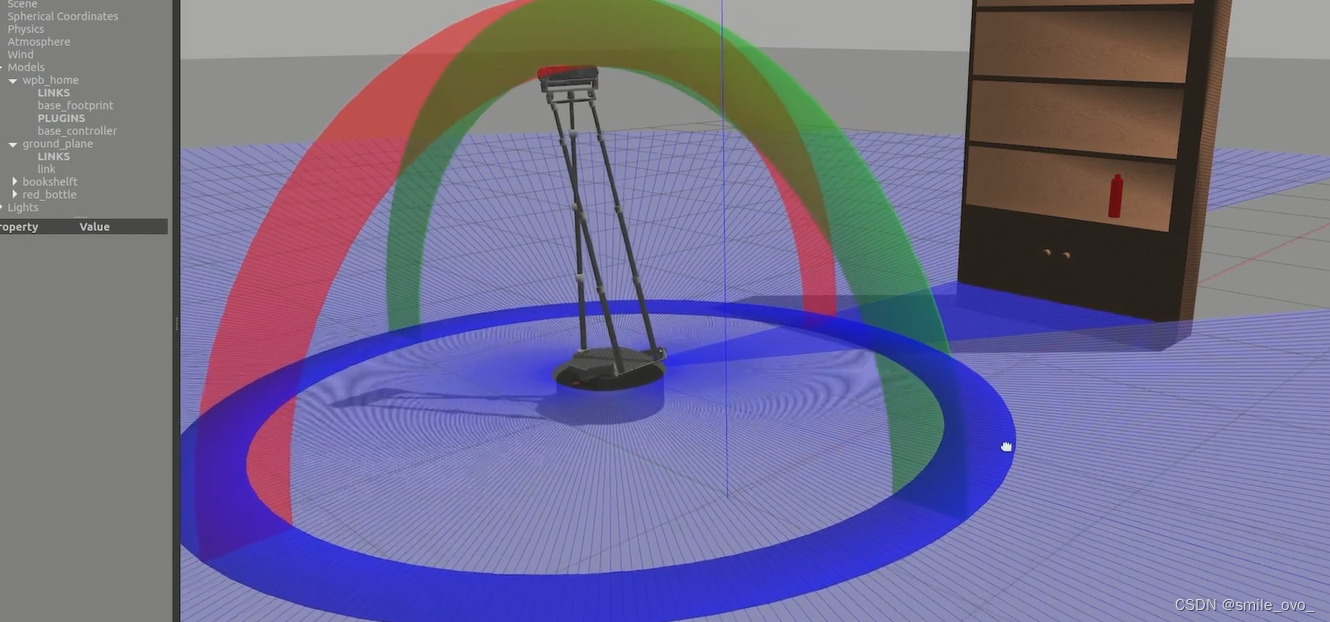
roslaunch wpr_simulation wpb_simple.launch
rosrun imu_pkg imu_node
此时机器人会保持yaw = 90°前进















 292
292

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









