









需要现在git上获取开源项目
在src目录下克隆软件包
git clone https://github.com/6-robot/wpr_simulation.git
一、激光雷达是什么?
按照测量维度可以分为单线雷达和多线雷达
按照测量原理可以分为三角测距雷达和TOF雷达
按照工作方式可以分为机械旋转雷达和固态雷达
二、使用Rviz观测传感器数据
Rviz是可视化工具,方便对机器人状态实时观测的辅助工具
roslaunch wpr_simulation wpb_simple.launch
rviz
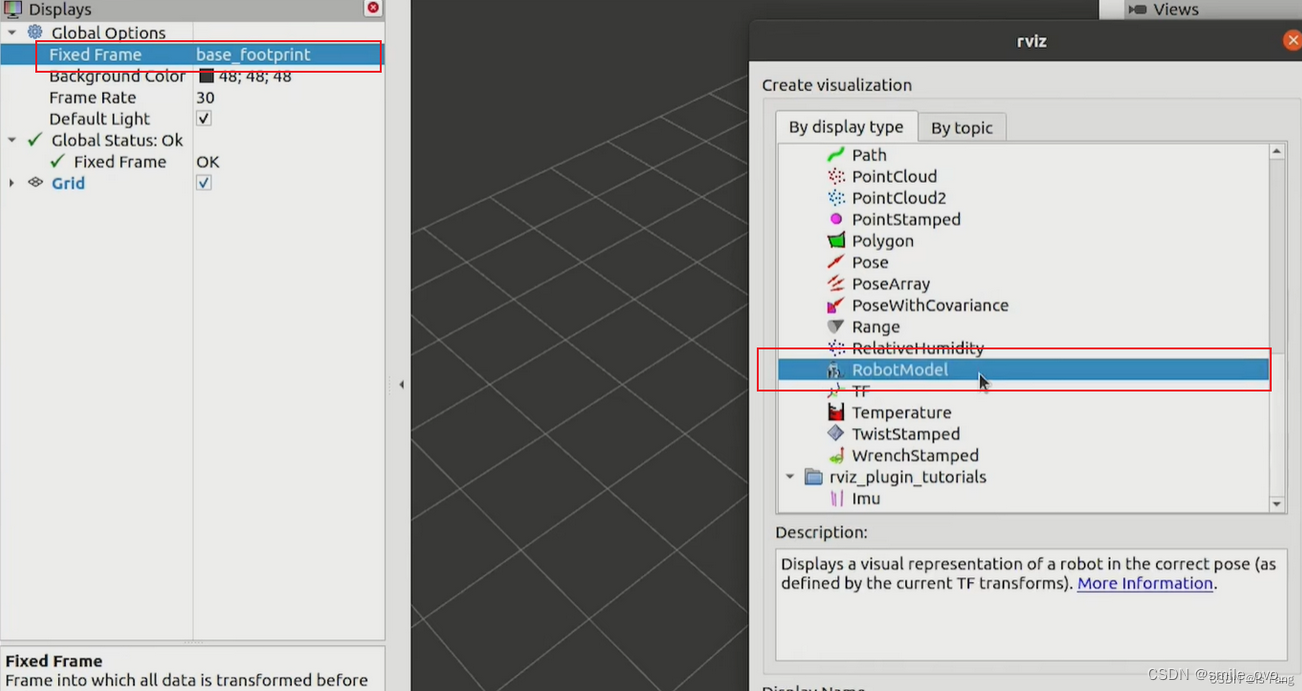
fixed frame选择base_footprint,然后点击左侧add添加机器人模型
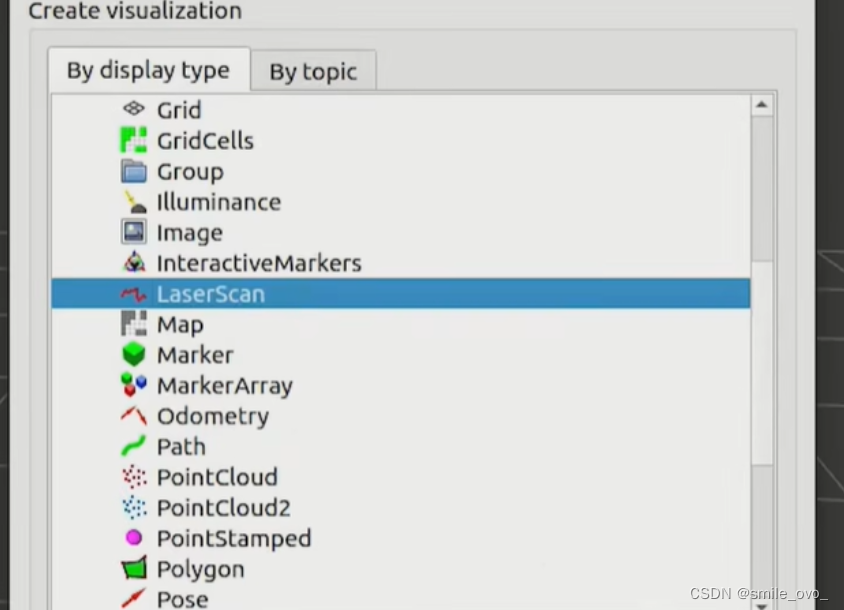
 添加激光雷达显示条
添加激光雷达显示条
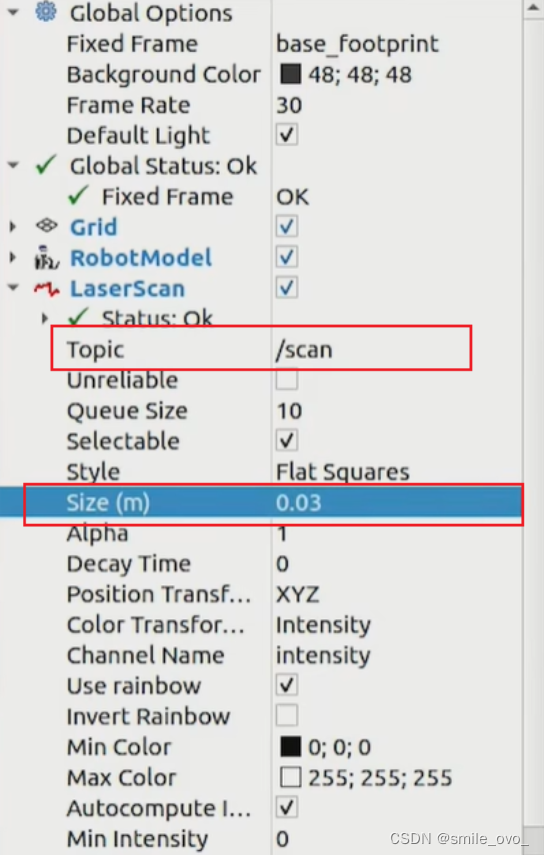
 修改激光雷达的话题名称和显示点大小
修改激光雷达的话题名称和显示点大小
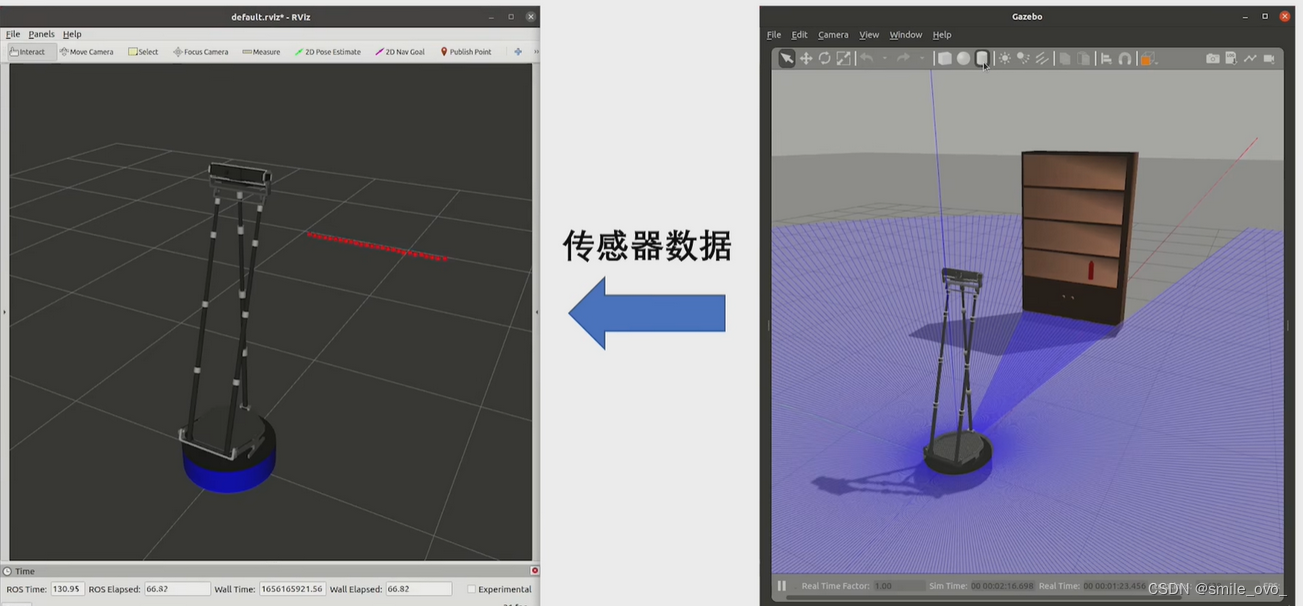
 rviz仿真工具与gazebo可视化工具的关系
rviz仿真工具与gazebo可视化工具的关系
保存可视化工具的配置
手动:File->save config as->在主目录下保存lidar.rivz,下次使用要手动点open config
自动:在launch中加载rviz配置文件
roslaunch wpr_simulation wpr_rviz.launch
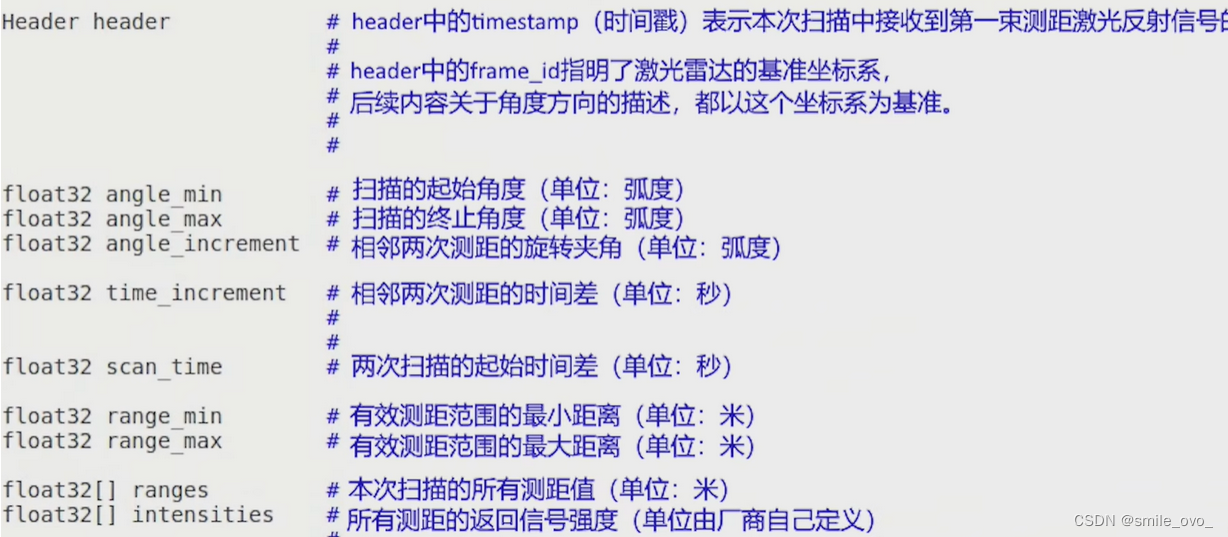
三、激光雷达消息包数据格式
传感器数据包:sensor_msgs,找到消息类型:LaserScan
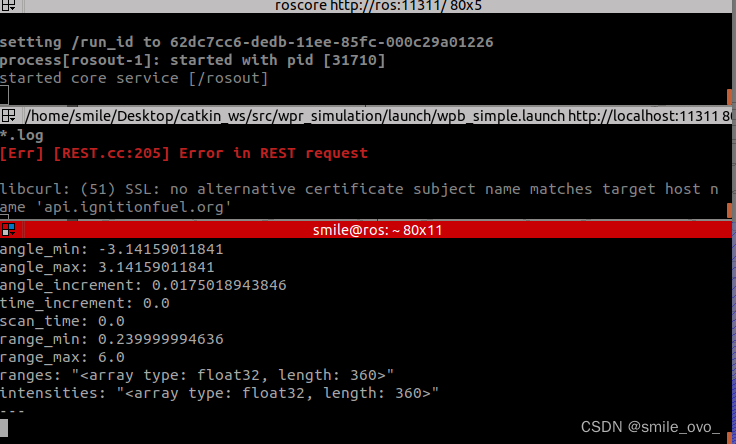
在运行仿真和可视化工具的前提下,显示scan话题里面的消息。
rostopic echo /scan --noarr #把数组折叠起来
四、订阅者节点的应用:获取激光雷达数据
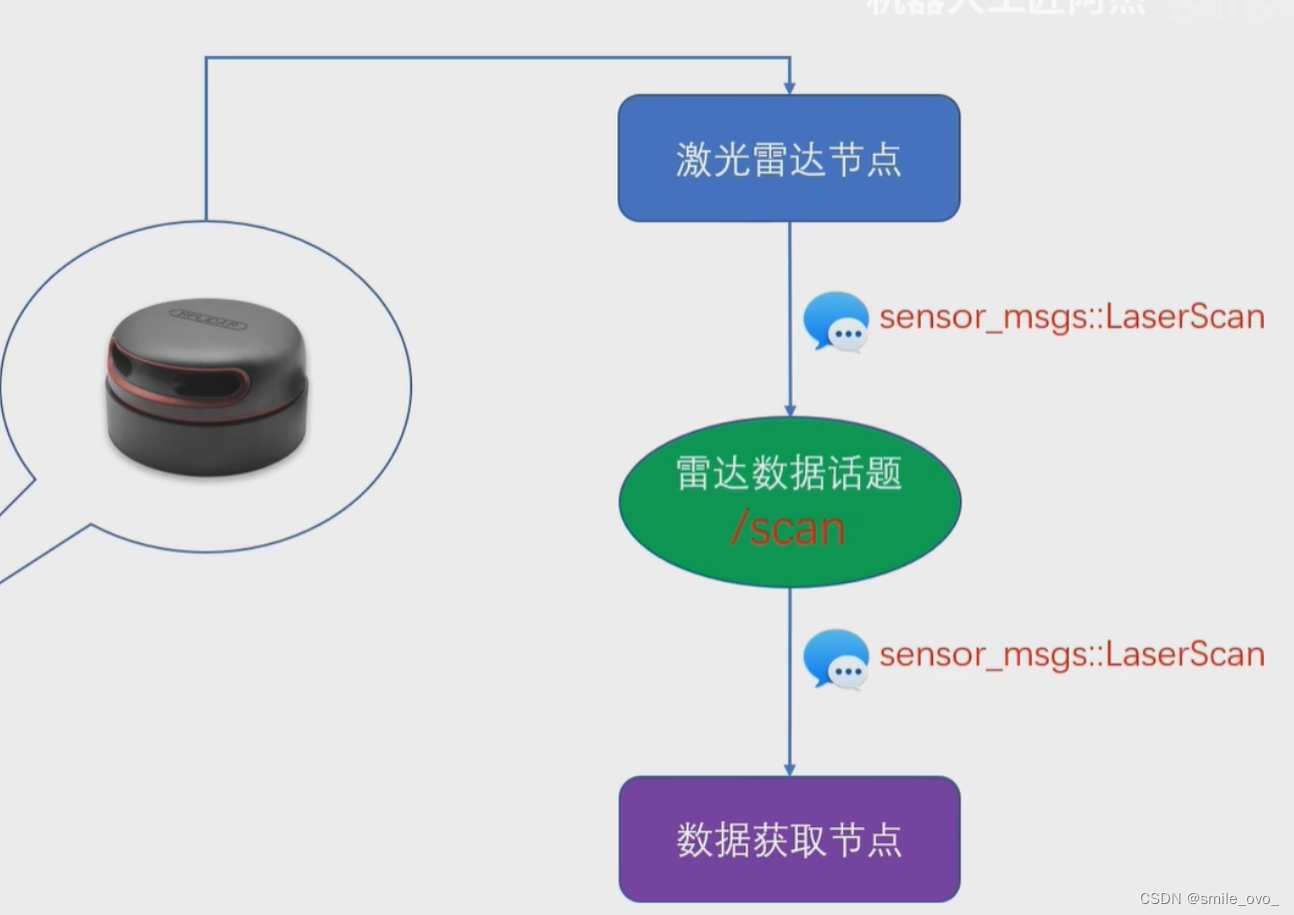
编写获取激光雷达数据的案例
进入catkin_ws/src目录:
catkin_create_pkg lidar_pkg rospy roscpp sensor_msgs
进入src目录创建lidar_node.cpp
#include <ros/ros.h>
#include <std_msgs/String.h>
#include <sensor_msgs/LaserScan.h>
void LidarCallback(const sensor_msgs::LaserScan msg)
{
int nNum = msg.ranges.size();
int nMid = nNum/2;//180°为正前方
float fMidDist = msg.ranges[nMid];
ROS_INFO("前方测距 ranges[%d] = %f 米", nMid, fMidDist);
}
int main(int argc, char** argv)
{
setlocale(LC_ALL,"");//设置中文编码
ros::init(argc,argv,"demo_lidar_data");
ros::NodeHandle n;
ros::Subscriber lidar_sub = n.subscribe("/scan", 10, &LidarCallback);
ros::spin();//保持节点运行不退出
}
修改CMakeLists.txt
add_executable(lidar_node src/lidar_node.cpp)
target_link_libraries(lidar_node
${catkin_LIBRARIES}
)
编译运行:
roslaunch wpr_simulation wpb_simple.launch
rosrun lidar_pkg lidar_node
五、激光雷达避障
#include <ros/ros.h>
#include <std_msgs/String.h>
#include <sensor_msgs/LaserScan.h>
#include <geometry_msgs/Twist.h>
ros::Publisher vel_pub;
static int nCount = 0;
void LidarCallback(const sensor_msgs::LaserScan msg)
{
int nNum = msg.ranges.size();
int nMid = nNum/2;
float fMidDist = msg.ranges[nMid];
ROS_INFO("前方测距 ranges[%d] = %f 米", nMid, fMidDist);
if(nCount > 0)
{
nCount--;
return;
}
geometry_msgs::Twist vel_cmd;
if(fMidDist < 1.5f)
{
vel_cmd.angular.z = 0.3;
nCount = 50;
}
else
{
vel_cmd.linear.x = 0.05;
}
vel_pub.publish(vel_cmd);
}
int main(int argc, char** argv)
{
setlocale(LC_ALL,"");
ros::init(argc,argv,"demo_lidar_behavior");
ros::NodeHandle n;
ros::Subscriber lidar_sub = n.subscribe("/scan", 10, &LidarCallback);
vel_pub = n.advertise<geometry_msgs::Twist>("/cmd_vel",10);
ros::spin();
}















 9608
9608

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









